一种基于IWOA-SVR-EEMD的共轨喷油器故障信号预处理方法
一种基于iwoa-svr-eemd的共轨喷油器故障信号预处理方法
技术领域
1.本发明涉及的是一种柴油机故障处理方法,具体地说是喷油器故障处理方法。
背景技术:
2.共轨喷油器作为柴油机燃油系统的关键部件,其健康状态影响柴油机的整体性能,因此针对共轨喷油器的故障诊断方法研究是目前研究的热点;受喷油器工作环境的影响,从高压油管采集到的压力信号不可避免的含有很多噪声,甚至会掩盖掉故障信息而造成误诊,因此对共轨喷油器的故障信号进行预处理对后续的故障诊断工作有十分重要的意义。
3.传统的针对非平稳信号的预处理方法,往往采用小波阈值去噪或经验模态分解的方法,但小波基和阈值需要人为确定,且对去噪效果影响大。经验模态分解方法是一种自适应的时频分析方法,可以将复杂信号分解为有限的本征模态分量之和。但经验模态分解方法本身存在一些不足,如模式混叠、端点效应、停止条件等。集合经验模态分解(ensemble empirical mode decomposition,eemd)方法为经验模态分解方法的改进,且能抑制模态混叠现象。但端点效应仍然存在。端点效应是指样条函数在端点处由于失去极值点的约束而导致包络线发散的现象。这里引入基于支持向量回归的信号延拓方法延拓信号序列,抑制端点效应。由于支持向量回归(support vector regression,svr)预测模型的性能在很大程度上惩罚因子c和核函数参数g的影响,因此在模型建立中对c、g进行最优选择是相当重要的。群体智能算法在参数寻优方面得到广泛应用,鲸鱼优化算法(whale optimization algorithm,woa)原理简单易懂,所需手动调节设置的参数少的优点,但在收敛精度与跳出局部最优方面存在一定不足。
技术实现要素:
4.本发明的目的在于提供能够实现共轨喷油器故障信号合理去噪的一种基于iwoa-svr-eemd的共轨喷油器故障信号预处理方法。
5.本发明的目的是这样实现的:
6.本发明一种基于iwoa-svr-eemd的共轨喷油器故障信号预处理方法,其特征是:
7.(1)采集高压油管压力波动信号,将信号序列作为支持向量回归的训练样本,利用训练样本与改进的鲸鱼优化算法对支持向量机的惩罚因子c与核参数g参数寻优,构建支持向量机模型;
8.(2)利用构建好的支持向量回归模型对训练样本信号进行端点延拓:对于给定的压力信号序列s(1),s(2)...s(n),n为原始压力信号序列的采样点数,首先确定样本训练个数l,产生一个训练集l={(x1,y1),(x2,y2),...,(x
l
,y
l
)},其中:
9.xi=[s(i) s(i+1) ... s(n-l+i-1)]
t
[0010]
yi=s(n-l+i),1≤i≤l
[0011]
预测第一个端点序列值,利用支持向量回归模型可得到边界外第一个预测值s(n+
1),即
[0012][0013]
其中:x
l+1
=[s(l+1) s(l+2) ... s(n)]
t
然后逐步迭代,获得预测信号序列值;
[0014]
(3)使用集合经验模态分解的方法分解延拓后的信号序列,得到本征模态分量imf;
[0015]
(4)计算每个本征模态分量的皮尔逊积矩相关系数,公式如下:
[0016][0017]
其中:ρi代表imfi与原信号x(t)的皮尔逊积矩相关系数,σ(x)代表原信号序列方差,cov(
·
)表示原始信号序列与各分量的协方差;
[0018]
(5)根据各分量与原信号的相关性大小选择阈值,高于阈值的本征模态分量进行分量重构,输出经过去噪的高压油管压力信号,预处理结束。
[0019]
本发明还可以包括:
[0020]
1、步骤(1)中改进鲸鱼优化算法,具体步骤如下:
[0021]
(a)将支持向量回归的惩罚因子c与核参数g组成的向量作为鲸鱼种群的一个鲸鱼个体,设置鲸鱼群的初始化规模,初始化鲸鱼群位置,计算鲸鱼群体的适应度值;将适应度值最小的个体作为鲸鱼群体全局最优位置向量;
[0022]
(b)鲸鱼群迭代寻优:计算鲸鱼群熵值,并计算熵差,鲸鱼群体熵值计算公式如下:
[0023][0024]
其中:s(t)为第t次迭代的熵值;n为鲸鱼种群的总个数;p(x
ti
)为鲸鱼群第t次迭代中第i个鲸鱼的权重,且
[0025][0026]
其中:g
ti
为第t次迭代中第i个鲸鱼的适应度值;
[0027]
熵差计算公式为:
[0028]
d(t)=s(t)-s(t-1)
[0029]
(c)计算惯性权重,并更新鲸鱼位置,惯性权重计算公式及鲸鱼位置更新公式如下:
[0030]
惯性权重计算公式为:
[0031][0032]
其中:ω(t)为鲸鱼群体第t次迭代的惯性权重值;ω
min
、ω
max
分别为惯性权重的最
小和最大值,t为最大迭代次数;
[0033]
按照下式更新鲸鱼个体位置:
[0034][0035]
其中:t为当前的迭代次数;x
t
为当前位置向量;为当前全局最优位置向量;d为最优个体位置与当前个体位置的距离,定义如下:
[0036][0037]
系数向量a和c定义如下:
[0038]
a=2a
·
rand
1-a
[0039]
c=2
·
rand2[0040]
其中:rand1和rand2为[0,1]范围内均匀分布产生的随机数;a为收敛因子,随迭代次数t从2线性减小到0,即
[0041]
a=2-2t/t
max
[0042]
其中t
max
为最大迭代次数;
[0043]
(d)如果熵差d(t)小于阈值1
×
10-10
或达到最大迭代次数则迭代结束,输出鲸鱼群体最佳位置向量。
[0044]
本发明的优势在于:本发明结合iwoa、svr与eemd算法的优点,提出了基于iwoa-svr-eemd的信号去噪方法,运用svr信号延拓方法抑制eemd算法的端点效应问题,iwoa-svr参数寻优可以避免传统人工反复试错的过程,且iwoa算法不仅具备woa算法原理简单易懂,所需手动调节设置的参数少的优点,而且相比于woa算法,iwoa算法收敛速度更快,收敛精度更高,更容易跳出局部最优。相比于传统的信号去噪方法,本发明得到的信号信噪比更高。
附图说明
[0045]
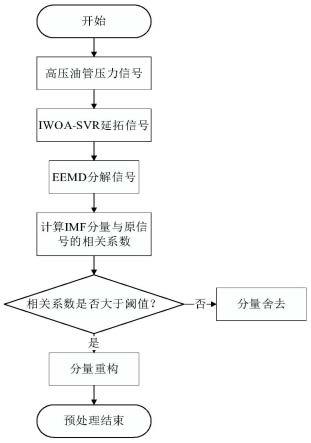
图1为本发明的流程图;
[0046]
图2为原始信号波形图;
[0047]
图3为iwoa-svr算法原理图;
[0048]
图4为经过集合经验模态分解的imf信号图;
[0049]
图5为各imf的皮尔逊积矩相关系数;
[0050]
图6为信号去噪前后对比图。
具体实施方式
[0051]
下面结合附图举例对本发明做更详细地描述:
[0052]
结合图1-6,本发明一种基于iwoa-svr-eemd的共轨喷油器故障信号预处理方法,包括以下步骤:
[0053]
步骤1:采集高压油管压力波动信号,将信号序列作为支持向量回归的训练样本。利用训练样本与改进的鲸鱼优化算法对支持向量机的惩罚因子c与核参数g参数寻优,构建
支持向量机模型。
[0054]
步骤2:利用构建好的支持向量回归模型对训练样本信号进行端点延拓。对于给定的压力信号序列s(1),s(2)...s(n)(n为原始压力信号序列的采样点数),首先确定样本训练个数l,按照一定的规则产生一个训练集l={(x1,y1),(x2,y2),...,(x
l
,y
l
)},其中:
[0055]
xi=[s(i) s(i+1) ... s(n-l+i-1)]
t
[0056]
yi=s(n-l+i),1≤i≤l
[0057]
预测第一个端点序列值,利用支持向量回归模型可得到边界外第一个预测值s(n+1),即
[0058][0059]
式中:x
l+1
=[s(l+1) s(l+2) ... s(n)]
t
然后逐步迭代,获得预测信号序列值;
[0060]
步骤3:使用集合经验模态分解的方法分解延拓后的信号序列,得到本征模态分量imf;
[0061]
步骤4:计算每个本征模态分量的皮尔逊积矩相关系数,公式如下:
[0062][0063]
式中ρi代表imfi与原信号x(t)的皮尔逊积矩相关系数,σ(x)代表原信号序列方差,cov(
·
)表示原始信号序列与各分量的协方差;
[0064]
步骤5:根据各分量与原信号的相关性大小选择阈值,高于阈值的本征模态分量进行分量重构,输出经过去噪的高压油管压力信号,预处理结束。
[0065]
步骤1中所述的改进鲸鱼优化算法,具体步骤如下:
[0066]
将支持向量回归的惩罚因子c与核参数g组成的向量作为鲸鱼种群的一个鲸鱼个体,设置鲸鱼群的初始化规模,初始化鲸鱼群位置,计算鲸鱼群体的适应度值;将适应度值最小的个体作为鲸鱼群体全局最优位置向量。
[0067]
鲸鱼群迭代寻优。计算鲸鱼群熵值,并计算熵差,鲸鱼群体熵值计算公式如下:
[0068][0069]
其中:s(t)为第t次迭代的熵值;n为鲸鱼种群的总个数;p(x
ti
)为鲸鱼群第t次迭代中第i个鲸鱼的权重,且
[0070][0071]
其中:g
t
i为第t次迭代中第i个鲸鱼的适应度值。
[0072]
熵差计算公式为:
[0073]
d(t)=s(t)-s(t-1)
[0074]
计算惯性权重,并更新鲸鱼位置,惯性权重计算公式及鲸鱼位置更新公式如下。
[0075]
惯性权重计算公式为:
[0076][0077]
其中:ω(t)为鲸鱼群体第t次迭代的惯性权重值;ω
min
、ω
max
分别为惯性权重的最小和最大值,此处取ω
min
=0.3,ω
max
=0.9;t为最大迭代次数。
[0078]
按照下式更新鲸鱼个体位置:
[0079][0080]
其中:t为当前的迭代次数;x
t
为当前位置向量;为当前全局最优位置向量;d为最优个体位置与当前个体位置的距离,定义如下:
[0081][0082]
系数向量a和c定义如下:
[0083]
a=2a
·
rand
1-a
[0084]
c=2
·
rand2[0085]
其中:rand1和rand2为[0,1]范围内均匀分布产生的随机数;a为收敛因子,随迭代次数t从2线性减小到0,即
[0086]
a=2-2t/t
max
[0087]
其中t
max
为最大迭代次数。
[0088]
如果熵差d(t)小于阈值1
×
10-10
或达到最大迭代次数则迭代结束,输出鲸鱼群体最佳位置向量。
[0089]
实施例:
[0090]
步骤1:通过压力传感器采集高压油管压力信号,喷油器故障类型为针阀磨损故障,轨压设定为70mpa,喷油器喷油频率为2hz,采样频率为25khz,。采样点为n=4096,原始信号波形如图2所示;
[0091]
步骤2:将采集的油压信号作为训练样本与改进的鲸鱼优化算法对支持向量机的惩罚因子c与核参数g参数寻优,构建支持向量机模型。
[0092]
参照图3,所属的iwoa-svr方法,具体步骤如下:
[0093]
将支持向量回归的惩罚因子c与核参数g组成的向量作为鲸鱼种群的一个鲸鱼个体,设置鲸鱼群的初始化规模,初始化鲸鱼群位置,计算鲸鱼群体的适应度值;将适应度值最小的个体作为鲸鱼群体全局最优位置向量。
[0094]
鲸鱼群迭代寻优。计算鲸鱼群熵值,并计算熵差,鲸鱼群体熵值计算公式如下:
[0095][0096]
其中:s(t)为第t次迭代的熵值;n为鲸鱼种群的总个数;p(x
ti
)为鲸鱼群第t次迭代中第i个鲸鱼的权重,且
[0097][0098]
其中:g
ti
为第t次迭代中第i个鲸鱼的适应度值。
[0099]
熵差计算公式为:
[0100]
d(t)=s(t)-s(t-1)
[0101]
计算惯性权重,并更新鲸鱼位置,惯性权重计算公式及鲸鱼位置更新公式如下。
[0102]
惯性权重计算公式为:
[0103][0104]
其中:ω(t)为鲸鱼群体第t次迭代的惯性权重值;ω
min
、ω
max
分别为惯性权重的最小和最大值,此处取ω
min
=0.3,ω
max
=0.9;t为最大迭代次数。
[0105]
按照下式更新鲸鱼个体位置:
[0106][0107]
其中:t为当前的迭代次数;x
t
为当前位置向量;为当前全局最优位置向量;d为最优个体位置与当前个体位置的距离,定义如下:
[0108][0109]
系数向量a和c定义如下:
[0110]
a=2a
·
rand
1-a
[0111]
c=2
·
rand2[0112]
其中:rand1和rand2为[0,1]范围内均匀分布产生的随机数;a为收敛因子,随迭代次数t从2线性减小到0,即
[0113]
a=2-2t/t
max
[0114]
其中t
max
为最大迭代次数。
[0115]
如果熵差d(t)小于阈值1
×
10-10
或达到最大迭代次数则迭代结束,输出鲸鱼群体最佳位置向量。
[0116]
步骤3:使用构建的支持向量回归模型对压力信号序列进行端点延拓。以延拓右端点为例。根据原始信号序列构造训练集,对于给定的压力信号序列s(1),s(2)...s(4096),首先确定样本训练个数l=4096,产生训练集;预测第一个端点序列值,利用支持向量回归模型可得到边界外第一个预测值s(4097),即
[0117][0118]
然后逐步迭代,预测500个数据点,向左的数据延拓同理,得到有5096个数据点的信号序列;
[0119]
步骤4:使用集合经验模态分解的方法分解延拓后的信号序列,得到本征模态分量imf;
[0120]
步骤5:计算每个本征模态分量的皮尔逊积矩相关系数,公式如下:
[0121][0122]
式中ωi代表imfi与原信号x(t)的皮尔逊积矩相关系数,σ(x)代表原信号序列方差,cov(
·
)表示原始信号序列与各分量的协方差;
[0123]
步骤4:运用端点效应评价指标、正交指数两个评价指标证明支持向量回归延拓可以有效抑制端点效应。利用寻优时间证明iwoa算法收敛速度更快。其中端点效应评价指标θ定义为:
[0124][0125]
式中rms
original
为原始信号的均方根值,rmsi为第i个imf的均方根值。若端点效应对信号内部污染程度越严重,则θ值越大,所以θ值越小越好。正交指数oi定义为:
[0126][0127]
式中n
imf
表示分解产生的imf分量的个数,n表示imf分量的长度;xk和rk分别表示原始信号和残余分量的第k个值;oi值越小,表明算法分解性能越好。实施例中n
imf
=12,n=4096;
[0128]
三个指标对比原始信号与woa-svr、镜像延拓与极值延拓三种不同方法延拓后信号的端点效应效果如表1所示,从表1可以看出iwoa-svr延拓可以有效抑制端点效应;
[0129] 端点效应评价指标正交指数时间iwoa-svr-eemd8.1520
×
10-5
5.88
×
10-4
162.489woa-svr-eemd2.7
×
10-3
6.67
×
10-4
1352.53镜面延拓2.9
×
10-3
8.05
×
10-4
\不延拓3.5
×
10-3
8.42
×
10-4
\
[0130]
表1
[0131]
步骤5:使用集合经验模态分解的方法分解延拓后的信号序列,得到本征模态分量imf,分解结果如图4所示;
[0132]
步骤6:计算每个本征模态分量的皮尔逊积矩相关系数,公式如下:
[0133][0134]
式中ρi代表imfi与原信号x(t)的皮尔逊积矩相关系数,σ(x)代表原信号序列方差,cov(
·
)表示原始信号序列与各分量的协方差;
[0135]
计算所得各分量与原信号的皮尔逊积矩相关系数如图5所示,
[0136]
步骤7:根据各分量与原信号的相关性大小选择阈值a,实例中a取0.1;高于阈值的本征模态分量进行分量重构,输出经过去噪的高压油管压力信号,预处理结束。原信号与去噪后的信号如图6所示。
[0137]
本实施例采集高压油管压力信号,采样频率为25khz,喷油器模拟针阀磨损故障,故障信号经过iwoa-svr信号延拓、集合经验模态分解、分量筛选和分量合成,最后得到去噪后的压力信号。计算本发明所提信号去噪方法与原始eemd分解去噪后信号的信噪比、均方根差和均方根差百分比,结果如表2所示,由表2可知,本发明所述方法在信噪比、均方根差和均方根差百分比方面表现均好于传统去噪方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1