用于飞行器涡轮机的功率传输模块的制作方法
1.本发明涉及一种用于飞行器涡轮机的功率传输模块,以及包括这种模块的涡轮机。
背景技术:
2.现有技术特别地包括文献wo-a1-2010/092263、fr-a1-2 987 416、fr-a1-3 008 462、fr-a1-3 008 463、fr-a1-3 041 054、us-a1-2015/354672、ep-a1-3 859 134和us-b2-9 797 470。
3.新一代的双流涡轮机,特别是具有高涵道比的这些双流涡轮机,包括机械减速器以驱动风扇推进器的轴。通常,减速器的目的是将动力涡轮的轴的、被成为快速的旋转速度转换成用于驱动风扇推进器的轴的较慢的旋转速度。
4.这种减速器通常包括被称为太阳齿轮的中心齿圈、环形齿轮和被称为行星齿轮的齿圈,行星齿轮被啮合在太阳齿轮和环形齿轮之间。行星齿轮由被称为行星架的框架保持。太阳齿轮、环形齿轮和行星架是行星式齿轮,因为它们的旋转轴线与涡轮机的纵向轴线x重合。行星齿轮各自具有不同的旋转轴线,并且围绕行星式齿轮的轴线均匀地分布在相同的运行直径上。这些轴线平行于纵向轴线x。
5.存在多种减速器的架构。在现有技术的多流涡轮机中,减速器是行星式或周转式的。在其他类似的应用中,存在被称为差动或“复合”的架构。
[0006]-对于行星式减速器,行星架是固定的,环形齿轮为该装置的输出轴,该输出轴以与太阳齿轮相反的方向旋转。
[0007]-对于周转式减速器,环形齿轮是固定的,行星架为该装置的输出轴,该输出轴以与太阳齿轮相同的方向旋转。
[0008]-对于复合减速器,没有元件是旋转附接的。环形齿轮以与太阳齿轮和行星架相反的方向旋转。
[0009]
减速器可以包括一个或多个齿轮级。以不同的方式(例如通过接触、摩擦或磁场)确保该啮合。
[0010]
在本技术中,“级”或“齿接部”是指有至少一系列的啮合齿和至少一系列的互补齿。齿接部可以是内部的或外部的。
[0011]
行星齿轮可包括一个或多个齿轮级。单级行星齿轮包括的齿接部可以是直线型、螺旋型或人字型,并且齿接部的齿位于相同的直径上。该齿接部与太阳齿轮和环形齿轮两者配合。
[0012]
双级行星齿轮包括位于不同直径上的两个齿接部。第一齿接部与太阳齿轮配合,第二齿接部通常与环形齿轮配合。
[0013]
新一代的涡轮机可以包括机械减速器,该机械减速器驱动一个风扇推进器以及另一个推进器,该另一个推进器可以被认为是一个较小的风扇或次级风扇。减速器是动力传输模块的一部分,该部分一方面用于旋转地驱动主风扇轴,另一方面用于驱动次级风扇轴。
[0014]
然而,目前为这种类型的动力传输模块提出的技术并不令人满意,特别是从其复杂性、总体尺寸和质量的角度来看不令人满意。
[0015]
本发明提出了一种改进方案,允许改善这些缺点中的一些或全部。
技术实现要素:
[0016]
本发明涉及一种用于飞行器涡轮机的功率传输模块,该功率传输模块包括:
[0017]-扭矩输入端,该扭矩输入端被构造成连接到涡轮轴,
[0018]-第一扭矩输出端,以及
[0019]-第二扭矩输出端,
[0020]
其特征在于,所述行星齿轮中的每个行星齿轮包括至少三个独立的齿接部,并且包括:
[0021]-第二齿接部,所述第二齿接部与形成所述第一扭矩输出端和第二扭矩输出端中的一个的元件啮合,以及
[0022]-第三齿接部,所述第三齿接部与另一元件啮合,当所述行星架固定时,所述另一元件形成第一扭矩输出端和第二扭矩输出端中的另一个,或者,当所述行星架能移动并形成第一扭矩输出端和第二扭矩输出端中的另一个时,所述另一元件为固定的环形齿轮。
[0023]
在本技术中,术语“上游”和“下游”是指(从上游到下游)穿过涡轮机,特别是穿过涡轮机管道的气体流。
[0024]
因此,本发明提出了在动力传输模块的减速器中使用三种齿接部的行星齿轮。这些齿接部中的一种齿接部与太阳齿轮啮合,专用于传递输入扭矩。这些齿接部中的另一种齿接部与专用于传递输出扭矩之一的元件啮合,该另一元件例如是环形齿轮或另一太阳齿轮。最后,最后一种齿接部与另一元件啮合,该另一元件可以专用于传递另一输出扭矩,也可以是一个固定的环形齿轮。在第一种情况下,当另一元件专用于传递输出扭矩时,减速器的行星架是固定的。在第二种情况下,当另一元件是固定的环形齿轮时,行星架是能移动的,并专用于传递输出扭矩中的另一个。
[0025]
存在多种可能的构型,特别是取决于扭矩输入和输出的位置、齿接部的直径、齿接部的类型(螺旋型、直线型、人字型)等。
[0026]
该方案与具有多级的减速机兼容。该方案也与带有旋转行星架的减速器(如周转式减速器或差动式减速器)兼容。该方案也与带有直线型、螺旋型或人字型齿接部的减速机兼容。该方案也与带有单体式行星架的减速器或者笼式减速器以及笼式架类型的减速器兼容。
[0027]
根据本发明的模块可包括以下特征中的一个或多个特征,该一个或多个特征被单独采用或彼此组合采用:
[0028]-所述第一齿接部、第二齿接部和第三齿接部具有不同的直径;
[0029]-所述第二扭矩输出端包括管状部段,所述第一扭矩输出端穿过所述管状部段;
[0030]-形成所述第二扭矩输出端的元件是环形齿轮或另一太阳齿轮;
[0031]-所述第一齿接部、第二齿接部、第三齿接部选自直线型、螺旋型或人字型的齿接部;
[0032]-所述第一齿接部位于上游并且为螺旋类型,所述第二齿接部与所述第一扭矩输
出端啮合且为直线类型,并且位于下游的所述第三齿接部与所述固定的环形齿轮啮合且为螺旋类型;
[0033]-所述第一齿接部位于上游并且为人字类型,所述第二齿接部与所述第一扭矩输出端啮合且为直线类型,并且位于下游的所述第三齿接部与所述固定的环形齿轮啮合且为螺旋类型;
[0034]-行星齿轮中的每个行星齿轮包括第四齿接部;
[0035]-行星齿轮中的每个行星齿轮包括两个独立的齿接部,该两个独立的齿接部与太阳齿轮的两个独立的齿接部啮合,并通过行星齿轮的另外两个齿接部彼此分开。
[0036]
本发明还涉及一种飞行器涡轮机,包括至少一个如上文所描述的模块。
[0037]
根据本发明的涡轮机可包括一个或多个如下特征,这些特征可以相互独立或相互组合采用:
[0038]-气体发生器,所述气体发生器配备有涡轮,所述涡轮包括具有旋转轴线的涡轮轴,
[0039]-主风扇推进器,所述主风扇推进器由主轴驱动旋转,主轴联接到第一扭矩输出端,该推进器位于第一环形分流头的上游,所述第一环形分流头用于分别为内部主流和外部次级流分离出两个环形流动管道,
[0040]-次级风扇推进器,所述次级风扇推进器由次级轴驱动旋转,次级轴联接到第二扭矩输出端,该推进器位于用于主流的流动管道中;
[0041]-所述传动模块位于环形壳体内,所述环形壳体包括同轴的两个环形壁,分别为内部环形壁和外部环形壁,所述内部环形壁和所述外部环形壁之间限定有用于主流的所述流动管道。
[0042]-所述环形壳体的内部环形壁连接到至少一个滚动轴承的上游环形支撑件,该至少一个滚动轴承用于引导所述第一扭矩输出端,和/或所述内部环形壁连接到至少一个滚动轴承的下游环形支撑件,该至少一个滚动轴承用于引导所述第二扭矩输出端。
[0043]-所述环形壳体的内部环形壁连接到位于所述第一支撑件和第二支撑件之间的所述固定的环形齿轮。
附图说明
[0044]
根据本发明的非限制性实施例的以下描述并且参照附图,其它特征及优点将显而易见,在附图中:
[0045]
[图1]图1为飞行器的涡轮机的示意性轴向横截面视图;
[0046]
[图2]图2为机械减速器的部分轴向横截面视图;
[0047]
[图3]图3为飞行器的涡轮机的示意性轴向横截面视图;
[0048]
[图4]图4为根据本发明的用于飞行器的涡轮机的示意性轴向横截面视图;
[0049]
[图5]图5为图4的涡轮机的功率传输模块的非常示意性的轴向横截面视图;
[0050]
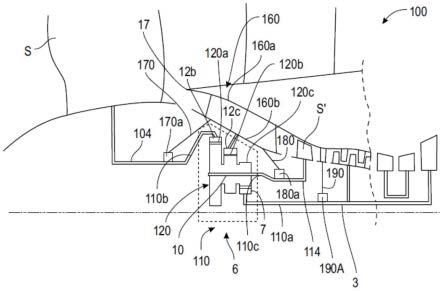
[图6]图6为图4的涡轮机的功率传输模块的轴向横截面的局部示意性视图;
[0051]
[图7]图7为图4的涡轮机的功率传输模块的轴向横截面的另一局部示意性视图,并示出了行星齿轮的齿接部的实施例的变型;
[0052]
[图8]图8为图4的涡轮机的功率传输模块的轴向横截面的示意性透视图,并示出
了行星齿轮的齿接部的实施例的另一变型;
[0053]
[图9a-9b]图9a和图9b是与图5类似的视图,并且示出了动力传输模块的替代实施例;
[0054]
[图9c-9d]图9c和图9d是与图5所示的动力传输模块类似的视图,并且示出了动力传输模块的其他替代实施例;
[0055]
[图9e-9f]图9e和图9f是与图5类似的视图,并且示出了动力传输模块的其他变型实施例;
[0056]
[图9g-9h]图9g和图9h是与图5类似的视图,并且示出了动力传输模块的其他变型实施例;
[0057]
[图9i-9j]图9i和图9j是与图5类似的视图,并且示出了动力传输模块的其他变型实施例;
[0058]
[图10]图10是动力传输模块的透视和轴向横截面的局部示意图,并且示出了其部件的旋转方向。
具体实施方式
[0059]
图1示出了涡轮机1,其通常包括风扇s或风扇推进器,以及气体发生器,气体发生器包括低压压缩机1a、高压压缩机1b、环形燃烧室1c、高压涡轮1d、低压涡轮1e和排气喷嘴1h。高压压缩机1b和高压涡轮1d通过高压轴2连接,并且它们共同形成高压(high-pressure,hp)体。低压压缩机1a和低压涡轮1e通过低压轴3连接,并且它们共同形成低压(low-pressure,lp)主体。
[0060]
这里的涡轮机1是双流的,双流是指两个空气流,分别是沿着涡轮机的纵向轴线x流动的主空气流f1和次级空气流f2。进入涡轮机并穿过风扇s的空气入口流f在风扇下游被环形分流头17分成两部分。径向内部的空气流在分流头17内部流动并形成在气体发生器内流动的主流f1。径向外部的空气流在分流头17外部流动并形成环绕气体发生器流动的次级流f1。
[0061]
风扇s由风扇轴4驱动,风扇轴通过减速器6由lp轴3驱动。该减速器6通常是行星式或周转式的。
[0062]
下面的描述涉及周转式减速器,其中,行星架和太阳齿轮是可旋转的,减速器的环形齿轮在发动机的参考框架中是固定的。
[0063]
减速器6被定位在涡轮机的上游部分中。固定结构在此示意性包括上游部分5a和下游部分5b,该上游部分和下游部分构成发动机壳体或定子5,该固定结构被布置成形成围绕减速器6的外壳e。在此,该外壳e在上游在轴承处通过密封件封闭,所述轴承允许风扇轴4穿过,该外壳在下游在lp轴3的通道处通过密封件封闭。
[0064]
图2示出了周转式减速器6。在输入端处,减速器6例如经由内花键7a连接到lp轴3。因此,lp轴3驱动被称为太阳齿轮7的行星式齿圈。传统上,太阳齿轮7的旋转轴线与旋转轴线x相同,该太阳齿轮驱动一系列被称为行星齿轮8的齿圈,这些行星齿轮围绕旋转轴线x以相同的直径均等地分布。该直径等于太阳齿轮7和行星齿轮8之间的运行中心距离的两倍。对于这种类型的应用,行星齿轮8的数量通常被限定在三个到七个之间。
[0065]
行星齿轮8的组由被称为行星架10的框架保持。每个行星齿轮8围绕其自身的轴线
y旋转并且与环形齿轮9啮合。
[0066]
在输出处,具有下述情况:
[0067]-在这种周转式构型中,行星齿轮8的组驱动行星架10围绕涡轮机的轴线x旋转。环形齿轮经由环形齿轮架12固定到发动机壳体或定子5,并且行星架10固定到风扇轴4。
[0068]-在另一种行星式构型中,行星齿轮8的组由附接到发动机壳体或定子5的行星架10保持。每个行星齿轮驱动经由环形齿轮架12装配到风扇轴4的环形齿轮。
[0069]-在另一种差动的构型中,行星齿轮8的组由连接到第一风扇轴5的行星架10保持。每个行星齿轮驱动经由环形齿轮架12装配到第二对旋风扇轴4的环形齿轮。
[0070]
每个行星齿轮8借助于(例如,滚动或流体动力轴承类型的)轴承11被安装成可自由旋转。每个轴承11安装在行星架10的轴10b中的一个上,并且所有的轴通过使用行星架10的一个或多个结构框架10a来相对于彼此定位。轴10b的数量和轴承11的数量等于行星齿轮的数量。出于操作、安装、制造、目检、维修或更换的原因,可以将轴10b和框架10a分成多个部件。
[0071]
由于与上述相同的原因,行星齿轮的齿接部可以被分成多个螺旋部或齿,螺旋部或齿各自具有中间平面p、p’。在本技术的示例中,详细说明了减速器的运行,其中,每个行星齿轮包括与环形齿轮(所述环形齿轮被分成两个环形齿轮半部)配合的两个系列的人字型齿:
[0072]-上游环形齿轮半部9a由轮缘9aa和附接的凸缘半部9ab组成。在轮缘9aa上是与每个行星齿轮8的齿接部8d的螺旋部啮合的前螺旋部。齿接部8d的螺旋部也与太阳齿轮7的螺旋部啮合。
[0073]-下游环形齿轮半部9b由轮缘9ba和附接的凸缘半部9bb组成。在轮缘9ba上是与每个行星齿轮8的齿接部8d的螺旋部啮合的后螺旋部。齿接部8d的螺旋部也与太阳齿轮7的螺旋部啮合。
[0074]
如果由于齿接部重叠而使得太阳齿轮7、行星齿轮8和环形齿轮9之间的螺旋部宽度变化,这些螺旋部宽度都以针对上游齿的中间平面p为中心,并且以针对下游齿的另一中间平面p’为中心。
[0075]
因此,图2示出了单齿轮级减速器的情况,即,每个行星齿轮8的同一齿接部8d与太阳齿轮7和环形齿轮9两者配合。即使齿接部8d包括两系列的齿,这些齿也具有相同的平均直径并形成被称为人字型的单个齿接部。
[0076]
上游环形齿轮半部9a的附接凸缘半部9ab和下游环形齿轮半部9b的附接凸缘半部9bb形成环形齿轮的附接凸缘9c。举例而言,环形齿轮9通过以下方式被附接到环形齿轮架,即,通过利用螺栓安装件将环形齿轮的附接凸缘9c和环形齿轮架的附接凸缘12a组装在一起。
[0077]
图2中的箭头描述了减速器6中的油输送。油通过不同的方式从定子部分5进入分配器13以进入减速器6,在此视图中对此将不再具体规定,因为它们针对了一种或多种类型的架构。分配器13包括喷射器13a和臂13b。喷射器13a的作用是润滑齿接部,臂13b的作用是润滑轴承。油被供给到喷射器13a并通过端部13c离开以润滑齿接部。油也被供给到臂13b并流动穿过轴承的供给口13d。然后,油穿过轴流通进入一个或多个缓冲区10c,并穿过孔口10d涌现,以润滑行星齿轮的轴承。
[0078]
图3示出了具有双流的飞行器涡轮机100。
[0079]
图1中使用的参考标记被用于图3以指定相同的元件。
[0080]
进入涡轮机100并穿过风扇s(此处为主风扇)的空气入口流f在风扇s下游被环形分流头17分成两部分。径向内部的空气流在分流头17内部流动并形成主流f1。径向外部的空气流在分流头17外部流动并形成环绕气体发生器流动的次级流f2。
[0081]
涡轮机1包括次级风扇s’,次级风扇s’包括位于主流f1的流动管道中的推进器或叶轮。
[0082]
涡轮机100包括动力传输模块110,动力传输模块110包括:连接到低压轴3的扭矩输入端110a;第一扭矩输出端110b,该第一扭矩输出端连接到转子的主驱动轴104和主风扇s的推进器;以及第二扭矩输出端110c,该第二扭矩输出端连接到转子的次级驱动轴114和次级风扇s’的推进器。
[0083]
图4示出了根据本发明的一个实施例的双流涡轮机100。
[0084]
该涡轮机100的动力传输模块110包括类似于图1和图2的减速器6,并包括具有三个独立齿接部120a、120b、120c的行星齿轮120(在图4中仅可见一个行星齿轮)。
[0085]
减速器6包括扭矩输入端110a和两个扭矩输出端110b、110c。
[0086]
扭矩输入端110a由减速器6的太阳齿轮7形成,该太阳齿轮7与低压轴3联接,并与每个行星齿轮120的一个齿接部(在图4的示例中为120c)啮合。
[0087]
如将在下文详细说明的,行星齿轮120的齿接部120a、120b、120c的啮合存在多种可能的构型。图4至图8和图9a至图9j示出了多种可能的构型(超过1000种)中的若干可能的构型和同一构型的若干种变体。
[0088]
具体如图4至图8所示,齿接部120a、120b、120c的直径可以不同。齿接部120a、120b、120c可以以任何方式或根据其直径布置,例如从上游到下游从最小直径到最大直径,或者从上游到下游从最大直径到最小直径。每一个齿接部都可以与环形齿轮或太阳齿轮啮合。
[0089]
改变位置齿轮的优点在于它使得能够平衡行星齿轮120a、120b、120c中的力并使剩余力矩最小化。
[0090]
一般来说,位于上游的齿接部被称为“上游齿接部”,位于下游的齿接部被称为“下游齿接部”,位于上游齿接部和下游齿接部之间的齿接部称为“中间齿接部”。
[0091]
在图4所示的示例中,较大直径的上游齿接部120a与形成第一扭矩输出端110b的第一环形齿轮12b啮合并连接到主轴104。该主轴104由至少一个滚动轴承170a旋转地引导,该滚动轴承由上游环形支撑件170承载。
[0092]
较小直径的下游齿接部120c与太阳齿轮7啮合,太阳齿轮形成扭矩输入端110a,并连接到低压轴3。
[0093]
中间齿接部120b与固定的第二环形齿轮12c啮合。
[0094]
减速器6的行星架10是能旋转的并且通过连接到次级轴114而形成第二扭矩输出端110c。该次级轴114由至少一个滚动轴承180a旋转地引导,该至少一个滚动轴承由下游环形支撑件180承载。
[0095]
传输模块110位于环形壳体160内,该环形壳体包括两个同轴环形壁160a、160b,所述两个同轴环形壁在两个同轴环形壁之间限定出用于主流f1的流动管道。
[0096]
环形支撑件170、180附接到壳体160。轴承170a、180a分别位于模块110的上游和下游。环形齿轮12c位于支撑件170、180之间。
[0097]
该低压轴3由至少一个滚动轴承190a旋转地引导,该至少一个滚动轴承由另一个环形支撑件190承载。
[0098]
在图5所示的示例中,较小直径的下游齿接部120a与太阳齿轮7啮合,太阳齿轮形成扭矩输入端110a,并连接到低压轴3。低压轴3的上游端或太阳齿轮7可以居中并在减速器6的上游在行星架10内被引导。
[0099]
行星架10是能旋转的并且通过连接到次级轴114而形成第二扭矩输出端110c。行星架10包括由低压轴3穿过的下游管状部段10e。行星架10或次级轴114的导向轴承(未示出)可由壳体160承载,如上文所述。
[0100]
较大直径的下游齿接部120c与连接到壳体160的固定环形齿轮12c啮合。
[0101]
中间齿接部120b与环形齿轮12b啮合,环形齿轮是能旋转的并通过连接到主轴104形成第一扭矩输出端110b。用于主轴104的导向轴承(未示出)可由壳体160承载,如上文所述。
[0102]
图6是图5中的减速器6的少许示意图。齿接部的类型可以相同也可以不同。例如,齿接部120a、120b、120c可以是直线型、螺旋型或人字型。替代地,所有构型和关联都是可能的。
[0103]
例如,在图7的情况下,上游齿接部120a为螺旋型,中间齿接部120b为直线型的,下游齿接部120c为螺旋型。利用预定义的螺旋部角度,通过这种方案可以取消行星齿轮120上的轴向力。
[0104]
在图8的情况下,上游齿接部120a为人字型,中间齿接部120b为直线型,下游齿接部120’c为螺旋型。每个行星齿轮120还包括与太阳齿轮7啮合的第四齿接部120d。齿接部120b、120’c位于齿接部120a、120d之间,并且太阳齿轮7包括两个独立且轴向间隔开的齿接部7a,用于与齿接部120a、120d啮合。
[0105]
最后一个方案是令人感兴趣的,因为它能够在扭矩输出端110b、110c上保持两种旋转方向。与在第二太阳齿轮上的输出端的方案相比,该方案适用于高于1.9的减速比。
[0106]
在图9a的构型tr1中,较小直径的下游齿接部120c与太阳齿轮7啮合。较大直径的上游齿接部与形成第一扭矩输出端110b的环形齿轮12b啮合,中间齿接部120b与形成第二扭矩输出端110c的环形齿轮12c啮合。行星架10是固定的。
[0107]
图9b中的构型tr1’与构型tr1相近。区别在于上游齿接部120a与形成第二扭矩输出端110c的环形齿轮12c啮合,并且中间齿接部120b与形成第一扭矩输出端110b的环形齿轮12b啮合。
[0108]
在图9c的构型tr2中,较小直径的下游齿接部120c与太阳齿轮7啮合。较大直径的上游齿接部120a与形成第一扭矩输出端110b的另一个太阳齿轮7’啮合,并且中间齿接部120b与形成第二扭矩输出端110c的环形齿轮12c啮合,环形齿轮12c包括太阳齿轮7或低压轴3所穿过的管状部段12c1。行星架10是固定的。
[0109]
在图9d的构型tr2’中,较小直径的上游齿接部120a与太阳齿轮7啮合。较大直径的下游齿接部120c与另一个太阳齿轮7’啮合,该另一太阳齿轮7’包括管状部段7b,太阳齿轮7或低压轴3穿过该管状部段,并且另一太阳齿轮7’形成第二扭矩输出端110c。中间齿接部
120b与环形齿轮12b啮合,环形齿轮形成第一扭矩输出端110b。行星架10是固定的。
[0110]
在图9e的构型tr3中,中间齿接部120b与太阳齿轮7啮合。较大直径的上游齿接部120a与另一太阳齿轮7’啮合,该另一太阳齿轮形成第一扭矩输出端110b。较小直径的下游齿接部120c与另一太阳齿轮7”啮合,该另一太阳齿轮7”包括管状部段7b,太阳齿轮7或低压轴3穿过该管状部段,并且该另一太阳齿轮7”形成第二扭矩输出端110c。行星架10是固定的。
[0111]
图9f中的构型tr3’与构型tr3相近。区别在于上游齿接部120a与形成第二扭矩输出端110c的太阳齿轮7”啮合,并且下游齿接部120c与形成第一扭矩输出端110b的太阳齿轮7’啮合。
[0112]
在图9g的构型tr4中,较小直径的下游齿接部120c与太阳齿轮7啮合。较大直径的上游齿接部120a与环形齿轮12b啮合,该环形齿轮形成第一扭矩输出端110b。中间齿接部120b与固定的第二环形齿轮12c啮合。行星架10是能移动的,并包括管状部段10e,太阳齿轮7或低压轴3穿过该管状部段,并且行星架形成第二扭矩输出端110c。
[0113]
在图9h的构型tr4’中,较小直径的上游齿接部120a与太阳齿轮7啮合。较大直径的下游齿接部120c与环形齿轮12c啮合,该环形齿轮形成第二扭矩输出端110c。中间齿接部120b与固定的第二环形齿轮12b啮合。行星架10是能移动的并且形成第一扭矩输出端110b。
[0114]
在图9i的构型tr5中,较小直径的下游齿接部120c与太阳齿轮7啮合。较大直径的上游齿接部120a与另一太阳齿轮7’啮合,该另一太阳齿轮形成第一扭矩输出端110b。中间齿接部120b与固定的环形齿轮12b啮合。行星架10是能移动的,并包括管状部段10e,太阳齿轮7或低压轴3穿过该管状部段,并且行星架形成第二扭矩输出端110c。
[0115]
在图9j的构型tr5’中,中间齿接部120b与太阳齿轮7啮合。较大直径的上游齿接部120a与固定的环形齿轮12b啮合。较小直径的下游齿接部120c与另一太阳齿轮7’啮合,该另一太阳齿轮包括管状部段7b,太阳齿轮7或低压轴3穿过该管状部段,并且该另一太阳齿轮形成第二扭矩输出端110c。行星架10是能移动的并且形成第一扭矩输出端110b。
[0116]
图10示出了动力传输模块110的减速器6的各部件的旋转方向。仅一个行星齿轮120被示出,箭头f3示出了该行星齿轮围绕其轴线y的旋转方向。太阳齿轮7、7’围绕减速器6的纵向轴线x沿相同的旋转方向f4、f5旋转。环形齿轮12b围绕该轴线x沿相反方向旋转。
[0117]
所有这些方案都能够从一个输入端获得两个输出端,且具有恒定的减速比。根据所需的减速比和旋转方向,一个或多个构型就可以满足需求。例如,如果希望得到1/1.5/8的比率(即,扭矩输入端110a处为1,第一扭矩输出端110b处为1:1.5,第二扭矩输出端110c处为1:8),那么优选的方案之一是tr4类型。
[0118]
因此,根据本发明的动力传输模块110能够通过从低压轴3传输的高速度来提供具有两个不同速度的两个扭矩输出,同时使该模块的减速器6的质量和总体尺寸最小化。本发明特别适用于低减速比,例如小于2的减速比,以及适用于兆瓦范围的功率。
[0119]
尽管本发明是在飞行器双流涡轮机的范围内进行说明的,但该模块可以装备到任何其他类型的涡轮机上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1