交互手柄和电子设备的制作方法
1.本发明涉及电子设备领域,特别涉及一种交互手柄和电子设备。
背景技术:
2.目前随着社会经济的发展,人们的娱乐生活日益丰富,目前主流的游戏方式一般都可以搭配交互手柄来进行,用户通过交互手柄与虚拟人物进行交互,其中,可以通过按动键位来完成走动、跳跃和攻击等动作,扳机键是其中不可或缺的一部分。然而,目前的交互手柄的续航能力较差,给用户带来了不好的使用体验。
技术实现要素:
3.本发明的主要目的是提出一种交互手柄,旨在实现对电池的手动充电,以提升交互手柄的续航能力。
4.为实现上述目的,本发明提出的交互手柄应用于电子设备,所述交互手柄包括:
5.壳体;
6.设于所述壳体内的发电机、电池,所述发电机的输出端电连接于所述电池的输入端;以及
7.扳机,可转动地设于所述壳体,并传动连接于所述发电机,所述扳机相对所述壳体运动,能带动所述发电机运转,以为所述电池充电。
8.可选地,所述交互手柄还包括与所述扳机传动连接的主动轮,所述发电机的输入端设置有从动轮,所述从动轮能啮合于所述主动轮;
9.所述扳机相对所述壳体运动时,能带动所述主动轮转动,以带动所述从动轮转动,而带动所述发电机运转。
10.可选地,所述扳机被按下时,能带动所述主动轮转动;所述扳机复位时,所述主动轮能与所述壳体保持相对静止。
11.可选地,所述扳机和所述主动轮通过棘轮机构相配合,以使所述扳机被按下时,能带动所述主动轮转动,且所述扳机复位时,所述扳机能相对所述主动轮转动。
12.可选地,所述主动轮设置有多个自内而外分布的齿圈,所述从动轮能相对所述壳体活动,以啮合于不同的所述齿圈。
13.可选地,所述交互手柄还包括驱动电机,所述驱动电机驱动连接于所述发电机,以带动所述从动轮相对所述壳体活动。
14.可选地,所述驱动电机的输出轴设置为丝杆,所述丝杆上可活动地套设有滑块,所述滑块啮合于所述丝杆,并在所述丝杆的轴向上滑动连接于所述壳体,所述发电机固接于所述滑块,多个所述齿圈的分布方向并行于所述输出轴的轴向。
15.可选地,所述交互手柄还包括控制器,所述控制器用于根据目标阻尼挡位控制所述驱动电机运转,以使所述从动轮啮合于对应的所述齿圈。
16.可选地,所述控制器还用于根据所述目标阻尼挡位获取目标应用程序。
17.可选地,所述控制器还用于在所述电池的当前电量达到预设值时,控制所述驱动电机运动,以带动所述从动轮脱离所述主动轮。
18.可选地,所述交互手柄还包括感应件,所述感应件用于感应所述从动轮的位置。
19.可选地,所述感应件设置为霍尔传感器,并固定于所述壳体,所述发电机设置有相对所述从动轮固定的磁体,所述霍尔传感器通过感应所述磁体的磁场强度,感应所述从动轮的位置。
20.本发明还提出一种电子设备,包括前述的电子设备。
21.可选地,所述电子设备为头戴显示设备,包括头戴部和所述交互手柄。
22.在本发明技术方案中,发电机具有输入端和输出端,自发电机的输入端输入动能,即可使发电机的输出端输出电能。具体而言,用户在按动扳机时,能驱使扳机相对壳体运动,扳机传动连接于发电机的输入端,也即能向发电机的输入端输入动能,使得发电机的输出端能够向电池输出点电能,由此实现对电池的手动充电,以提升交互手柄的续航能力,从而提升用户的使用体验。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
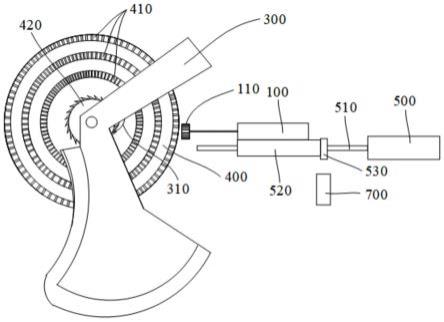
24.图1为本发明交互手柄一实施例的局部结构示意图;
25.图2为本发明交互手柄的控制系统示意图。
26.附图标号说明:
27.标号名称标号名称100发电机520滑块110从动轮530磁体200电池600控制器300扳机700感应件310棘爪810红外模块400主动轮811红外光源410齿圈812驱动单元420棘轮820振动马达500驱动电机830加速度传感器510丝杆840充电ic
28.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其
他实施例,都属于本发明保护的范围。
30.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
31.术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
32.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,若全文中出现的“和/或”的含义为,包括三个并列的方案,以“a和/或b”为例,包括a方案,或b方案,或a和b同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
33.本发明提出一种交互手柄。
34.在本发明一实施例中,如图1所示,该交互手柄,包括:
35.壳体;
36.设于所述壳体内的发电机100、电池200,所述发电机100的输出端电连接于所述电池200的输入端;以及
37.扳机300,可转动地设于所述壳体,并传动连接于所述发电机100,所述扳机300相对所述壳体运动,能带动所述发电机100运转,以为所述电池200充电。
38.可以理解,发电机100具有输入端和输出端,自发电机100的输入端输入动能,即可使得发电机100的输出端能够输出电能。在本发明技术方案中,用户在按动扳机300时,能驱使扳机300相对壳体运动,扳机300传动连接于发电机100的输入端,也即能向发电机100的输入端输入动能,使得发电机100的输出端能够向电池200输出点电能,由此实现对电池200的手动充电,以提升交互手柄的续航能力,从而提升用户的使用体验。另外,交互手柄还设置有充电口,电池200的输入端还电连接于该充电口,在交互手柄闲置时,能够通过该充电口对电池200进行充电。
39.进一步地,在本实施例中,所述交互手柄还包括与所述扳机300传动连接的主动轮400,所述发电机100的输入端设置有从动轮110,所述从动轮110能啮合于所述主动轮400;所述扳机300相对所述壳体运动时,能带动所述主动轮400转动,以带动所述从动轮110转动,而带动所述发电机100运转。可以理解,主动轮400和传动轮之间通过齿结构相啮合,齿传动的配合度高,且传动平稳,有利于保障发电机100平稳运转,从而使得电池200能够平稳充电。当然,在其他实施例中,也可以是,发电机100的输入端设置有从动摇杆,扳机300通过曲柄摇杆结构和从动摇杆传动连接,扳机300相对壳体转动时,通过带动从动摇杆转动,同样能使发电机100运转。
40.进一步地,在本实施例中,所述扳机300被按下时,能带动所述主动轮400转动;所述扳机300复位时,所述主动轮400能与所述壳体保持相对静止。为方便后文描述,将扳机300按下时,从动轮110随之转动的方向称为正转,此时,发电机100的输出端的正极电连接
于,负极则电连接于电池200的正极。本实施例中,扳机300被按下时,主动轮400能够带动从动轮110正转,使得发电机100自输出端输出的电能能到达电池200。而扳机300复位时,扳机300能够相对主动轮400转动,主动轮400与壳体相对静止,从动轮110也随之保持静止,避免从动轮110反转,使得发电机100的输出端的正负极改变,导致电池200的性能受影响。此外,由于扳机300被按下时,主动轮400和从动轮110将发生相对运动,从动轮110对主动轮400的作用力向扳机300传递,使得用户在按压扳机300时能受到阻尼反馈,有利于提升用户的使用体验。当然,在其他实施例中,也可以是,扳机300被按下时,从动轮110静止,扳机300复位时,从动轮110正转;亦或者,扳机300被按下时,主动轮400带动从动轮110正转,且发电机100的输出端电连接于电池200的输入端,扳机300复位时,主动轮400带动从动轮110反转,发电机100的输出端断开与电池200的输入端的电连接。
41.进一步地,在本实施例中,所述扳机300和所述主动轮400通过棘轮420机构相配合,以使所述扳机300被按下时,能带动所述主动轮400转动,且所述扳机300复位时,所述扳机300能相对所述主动轮400转动。具体而言,主动轮400设置有棘齿,扳机300上设置有啮合于棘齿的棘爪310,在扳机300被按下时,扳机300的转动方向与棘齿的倾斜方向同向,使得扳机300能通过棘爪310与棘齿的配合带动主动轮400转动,在扳机300复位时,扳机300将反向转动,而不受棘爪310和棘齿的配合的约束,使得扳机300能够相对主动轮400转动,主动轮400和壳体的配合可以是具有阻尼的,在扳机300相对主动轮400转动时,主动轮400能与壳体之间保持相对静止,由此使从动轮110只能正转,不能反转。当然,在其他实施例中,也可以是,扳机300和主动轮400通过蜗轮蜗杆组件配合,在蜗杆的螺旋角的限制下,实现对蜗轮的单向自锁,也可以使从动轮110只能正转,不能反转。
42.进一步地,在本实施例中,所述主动轮400设置有多个自内而外分布的齿圈410,所述从动轮110能相对所述壳体活动,以啮合于不同的所述齿圈410。可以理解,齿圈410由多个连接成环的齿槽组成,主动轮400包括两相对而设的端面以及连接两端面的一周面,多个齿圈410成型于主动轮400的其中一端面,并自内而外地依次环设,在自内而外的方向上,多个齿圈410的尺寸渐次增大,当从动轮110啮合于不同的齿圈410后,即可与主动轮400之间具备不同的传动比,而能给扳机300提供不同的阻尼反馈,并使发电机100具备不同的发电效率。如此,可以根据当前电量情况,选择需要的发电效率,将从动轮110啮合于对应的齿圈410,即可保障对电池200的充电效率。
43.进一步地,在本实施例中,所述交互手柄还包括驱动电机500,所述驱动电机500驱动连接于所述发电机100,以带动所述从动轮110相对所述壳体活动。如此,通过驱动电机500带动发电机100运动,能使得从动轮110啮合于不同的齿圈410,从而使主动轮400和传动轮之间具有不同的传动比。当然,在其他实施例中,用户可以手动驱动发电机100移动,以带动从动轮110移动。
44.进一步地,在本实施例中,所述驱动电机500的输出轴设置为丝杆510,所述丝杆510上可活动地套设有滑块520,所述滑块520啮合于所述丝杆510,并在所述丝杆510的轴向上滑动连接于所述壳体,所述发电机100固接于所述滑块520,多个所述齿圈410的分布方向并行于所述输出轴的轴向。如此,通过丝杆510和滑块520的配合,输出轴的转动能转换为滑块520沿输出轴轴向的移动,从而带动从动轮110在多个齿圈410的分布方向上移动,以啮合于不同的齿圈410。
45.进一步地,在本实施例中,如图2所示,所述交互手柄还包括控制器600,所述控制器600用于根据目标阻尼挡位控制所述驱动电机500运转,以使所述从动轮110啮合于对应的所述齿圈410。其中,交互手柄的存储器可以存储有阻尼挡位和充电效率的对应关系,用户选择需要的充电效率,即可获得对应的目标阻尼挡位,亦或者,用户直接选择所需的目标阻尼挡位,存储器还可存储阻尼挡位和齿圈410的对应关系,使得控制器600能够控制驱动电机500啮合于对应的齿圈410,如此,能实现对从动轮110啮合的齿圈410进行切换的自动控制。
46.进一步地,在本实施例中,所述控制器600还用于根据所述目标阻尼挡位获取目标应用程序。目标应用程序可以是游戏程序,可以是一个,也可以是多个,如此,能够通过在电子设备的显示终端显示目标应用程序,或者通过语音终端播报目标应用程序,以向用户推荐目标应用程序,目标应用程序是对应目标阻尼挡位的,用户选择进入目标应用程序,能够获得较佳的游戏体验。
47.进一步地,在本实施例中,所述控制器600还用于在所述电池200的当前电量达到预设值时,控制所述驱动电机500运动,以带动所述从动轮110脱离所述主动轮400。如此,在电池200充电完成后,或者充电到一定程度时,可以通过驱动电机500带动从动轮110脱离从动轮110,此后,用户操作扳机300,不会受到主动轮400和从动轮110啮合带来的阻尼作用,不会限制用户体验的游戏类型,而能实现交互手柄的通用功能,有利于保障用户的使用体验。
48.进一步地,在本实施例中,所述交互手柄还包括感应件700,所述感应件700用于感应所述从动轮110的位置。如此,控制器600在控制驱动电机500运转,使从动轮110切换啮合的齿圈410,或者脱离从动轮110时,能够通过感应件700感应从动轮110的当前位置,并且,在驱动电机500运转的过程中,感应件700能够实时监测从动轮110的位置,以供控制器600判断从动轮110是否运动到位,当从动轮110移动到目标位置时,控制器600即控制驱动电机500停转。
49.进一步地,在本实施例中,所述感应件700设置为霍尔传感器,并固定于所述壳体,所述发电机100设置有相对所述从动轮110固定的磁体530,所述霍尔传感器通过感应所述磁体530的磁场强度,感应所述从动轮110的位置。不失一般性,发电机100的外壳固定连接于滑块520,磁体530安装于滑块520上,如此,在输出轴的轴向上,磁体530能够和从动轮110同步运动,而能通过磁体530的位置表征从动轮110与多个齿圈410的相对位置,而霍尔传感器固定于壳体,当磁体530随滑块520发生运动时,磁体530和霍尔传感器之间的相对位置发生变化,使得霍尔传感器处的磁场强度改变,霍尔传感器的霍尔电压也随之变化,由此,能够通过霍尔传感器的霍尔电压表征从动轮110与多个齿圈410的相对位置,使得霍尔传感器能感应从动轮110的位置,而能为控制器600控制驱动电机500的运转提供控制依据。
50.具体地,如图2所示,控制器600设置为mcu(microcontroller unit,微控制单元),手柄还包括电连接于mcu的红外模块810、振动马达820、加速度传感器830、充电ic(integrated circuit,集成电路),电池200和发电机100之间通过充电ic电连接,充电ic还电连接于充电口,霍尔传感器、驱动电机500以及扳机300件均电连接于mcu,另外,除了扳机300外,手柄还设置有其他电连接于mcu的按键。其中,红外模块810包括红外光源811和驱动单元812,mcu通过控制驱动单元812动作,使红外光源811发射红外光线,以通过红外光线的
轨迹捕捉交互手柄的运动轨迹,以实现对用户姿态的捕捉,或供用户输入字符,此外,加速度传感器830用于捕捉用户姿态,振动马达820用于提供振动反馈。
51.本发明还提出一种电子设备,该电子设备包括交互手柄,该交互手柄的具体结构参照上述实施例,由于本电子设备采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。其中,该电子设备可以是包括头戴部和交互手柄的头戴显示设备,例如vr(virtual reality,虚拟现实)头显设备或mr(mixed reality,混合现实)头显设备或ar(augmented reality,增强现实)头显设备。
52.以上所述仅为本发明的可选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1