基于惯性的动力装置的制作方法
本发明涉及动力,尤其涉及一种基于惯性的动力装置。
背景技术:
1、动力装置是指利用燃料的化学能、核能,自然界的水能、风能和地热能等能量产生原动力的成套技术装备。由原动机以及全部辅助机械和设备、管路、仪表和监控系统等组成。按能源种类,分热能动力装置、核能动力装置和水能动力装置等;按原动机种类,分汽轮机动力装置、内燃机动力装置和燃气轮机动力装置等。可为船舶、车辆、飞机和火箭等提供动力。但是现有动力装置的能量转换效率较低,不能满足需要。
2、综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要加以改进。
技术实现思路
1、针对上述的缺陷,本发明的目的在于提供一种基于惯性的动力装置,其能够利用物体运动的惯性提供动力,能量转换效率更高,且应用范围广泛。
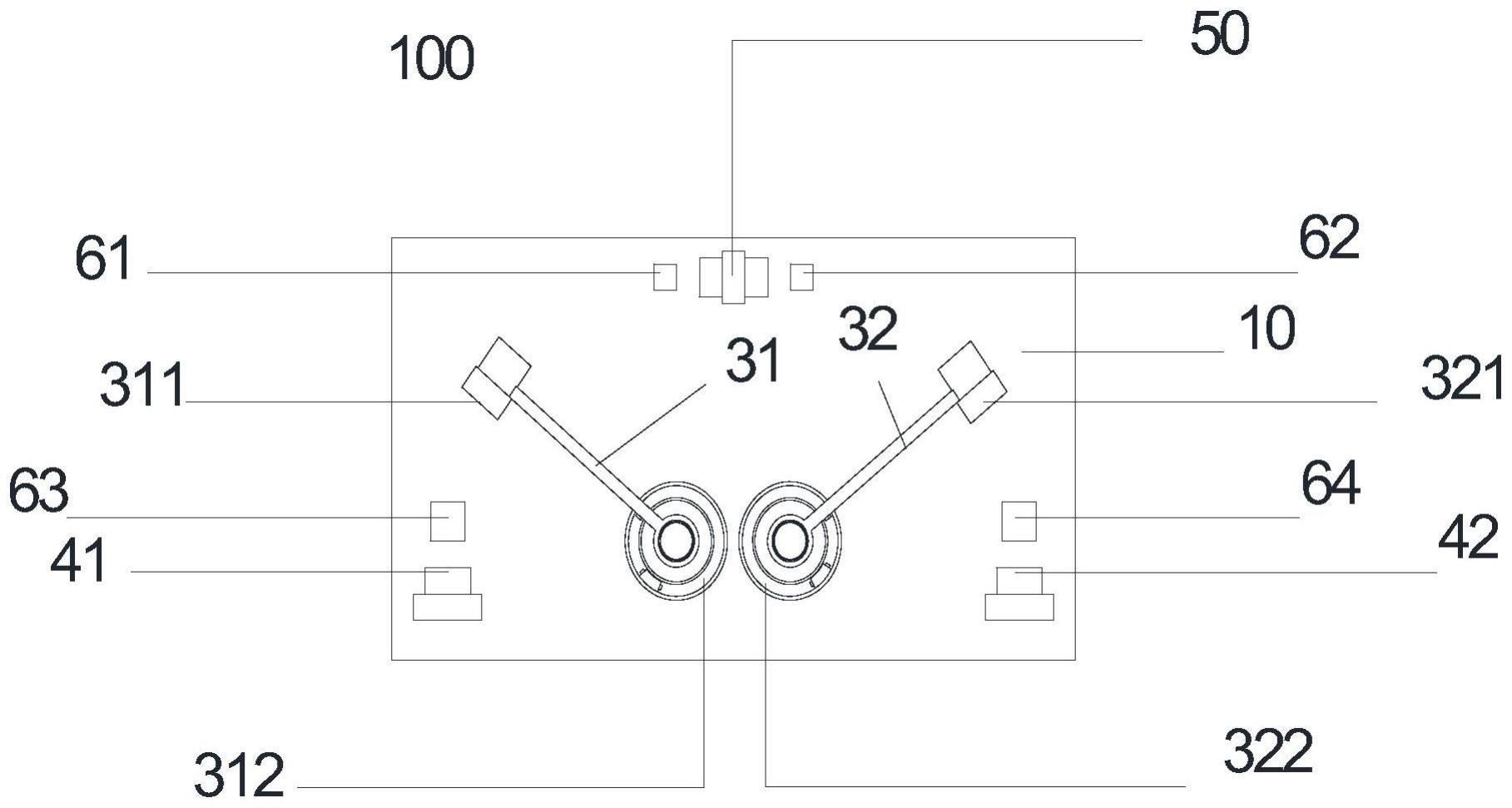
2、本发明提供一种基于惯性的动力装置,包括至少一层底板,所述底板上设有至少一对摆臂、至少一对摆臂驱动机构、至少一对摆臂受力机构和至少一回弹机构;
3、每对所述摆臂包括所述第一摆臂和所述第二摆臂,所述第一摆臂和所述第二摆臂左右对称设于所述底板上,所述第一摆臂的顶部设有第一摆臂施力机构,所述第一摆臂的底部设有第一摆臂旋转轴,所述第一摆臂旋转轴设置于所述底板上;所述第二摆臂的顶部设有第二摆臂施力机构,所述第二摆臂的底部设有第二摆臂旋转轴,所述第二摆臂旋转轴设置于底板上;
4、每对所述摆臂受力机构包括第一摆臂受力机构和第二摆臂受力机构,所述第一摆臂受力机构设于所述第一摆臂的左侧,所述第二摆臂受力机构设于所述第二摆臂的右侧;
5、每对所述摆臂驱动机构包括第一摆臂驱动机构和第二摆臂驱动机构,所述第一摆臂驱动机构和所述第二摆臂驱动机构分别驱动所述第一摆臂和所述第二摆臂进行摆动运动;
6、所述回弹机构设于所述第一摆臂和所述第二摆臂的正上方;
7、所述第一摆臂受到所述第一摆臂驱动机构的动力驱动在所述第一摆臂受力机构和所述回弹机构之间摆动,当所述第一摆臂施力机构撞击所述回弹机构时,对所述回弹机构施加向右的驱动力,且所述第一摆臂施力机构受力后向下转动;当所述第一摆臂施力机构撞击所述第一摆臂受力机构时,对所述第一摆臂受力机构施加向下的驱动力,所述第一摆臂施力机构受力后向上转动;
8、所述第二摆臂受到所述第二摆臂驱动机构的动力驱动在所述第二摆臂受力机构和回弹机构之间摆动;当所述第二摆臂施力机构撞击所述回弹机构时,对所述回弹机构施加向左的驱动力,且所述第二摆臂施力机构受力后向下转动;当所述第二摆臂施力机构撞击所述第二摆臂受力机构时,对所述第二摆臂受力机构施加向下的驱动力,所述第二摆臂施力机构受力后向上转动。
9、根据本发明所述的基于惯性的动力装置,所述基于惯性的动力装置还包括控制单元,所述控制单元分别与所述第一摆臂驱动机构和所述第二摆臂驱动机构电性连接;
10、所述控制单元通过控制所述第一摆臂驱动机构和所述第二摆臂驱动机构,来控制所述第一摆臂和所述第二摆臂同步摆动,所述第一摆臂和所述第二摆臂分别同时撞击所述第一摆臂受力机构和所述第二摆臂受力机构,同时对所述第一摆臂受力机构和所述第二摆臂受力机构施加相同的向下的驱动力;所述第一摆臂和所述第二摆臂分别同时撞击所述回弹机构,所述第一摆臂对所述回弹机构施加向右的驱动力和所述第二摆臂对所述回弹机构施加的向左的驱动力相互抵销,此时基于惯性的动力装置向前直线运动。
11、根据本发明所述的基于惯性的动力装置,所述控制单元通过控制所述第一摆臂驱动机构和所述第二摆臂驱动机构,来控制所述第一摆臂的摆动速度大于所述第二摆臂的摆动速度,由于所述第一摆臂对所述回弹机构施加向右的驱动力次数大于所述第二摆臂对所述回弹机构施加的向左的驱动力的次数,所述基于惯性的动力装置向前且偏左方向运动;
12、所述控制单元通过控制所述第一摆臂驱动机构和所述第二摆臂驱动机构,来控制所述第一摆臂的摆动速度小于所述第二摆臂的摆动速度,由于所述第一摆臂对所述回弹机构施加向右的驱动力次数大于所述第二摆臂对所述回弹机构施加的向左的驱动力的次数,所述基于惯性的动力装置向前且偏右方向运动。
13、根据本发明所述的基于惯性的动力装置,所述第一摆臂驱动机构设于所述第一摆臂旋转轴的下方,所述第一摆臂驱动机构驱动所述第一摆臂旋转轴转动;所述第二摆臂驱动机构设于所述第二摆臂旋转轴的下方,所述第二摆臂驱动机构驱动所述第二摆臂旋转轴转动。
14、根据本发明所述的基于惯性的动力装置,所述第一摆臂驱动机构设于所述回弹机构的左侧,所述第一摆臂驱动机构驱动所述第一摆臂施力机构进行摆动运动;所述第二摆臂驱动机构设于所述回弹机构的右侧,所述第二摆臂驱动机构驱动所述第二摆臂施力机构进行摆动运动。
15、根据本发明所述的基于惯性的动力装置,所述底板上还设有第一摆臂检测机构,所述第一摆臂检测机构位于所述回弹机构左侧,所述第一摆臂检测机构与所述控制单元电性连接,当所述第一摆臂检测机构检测到所述第一摆臂时,所述控制单元控制所述第一摆臂驱动机构工作;
16、所述底板上还设有第二摆臂检测机构,所述第二摆臂检测机构位于所述回弹机构右侧,所述第二摆臂检测机构与所述控制单元电性连接,当所述第二摆臂检测机构检测到所述第二摆臂时,所述控制单元控制所述第二摆臂驱动机构工作。
17、根据本发明所述的基于惯性的动力装置,所述第一摆臂驱动机构设于所述第一摆臂受力机构的上方,所述第一摆臂驱动机构驱动所述第一摆臂施力机构进行摆动运动;所述第二摆臂驱动机构设于所述第二摆臂受力机构的上方,所述第二摆臂驱动机构驱动所述第二摆臂施力机构进行摆动运动。
18、根据本发明所述的基于惯性的动力装置,所述底板上还设有第三摆臂检测机构,所述第三摆臂检测机构位于所述第一摆臂受力机构的上方,所述第三摆臂检测机构与所述控制单元电性连接,当所述第三摆臂检测机构检测到所述第一摆臂时,所述控制单元控制所述第一摆臂驱动机构工作;
19、底板上还设有第四摆臂检测机构,所述第四摆臂检测机构位于所述第二摆臂受力机构的上方,所述第四摆臂检测机构与所述控制单元电性连接,当所述第四摆臂检测机构检测到所述第二摆臂时,所述控制单元控制所述第二摆臂驱动机构工作。
20、根据本发明所述的基于惯性的动力装置,所述第一摆臂驱动机构和第二摆臂驱动机构为电磁动力装置、化学动力装置或者核动力装置。
21、根据本发明所述的基于惯性的动力装置,包括相互叠合的多层所述底板,每层所述底板上都设有至少一对所述摆臂、至少一对所述摆臂驱动机构、至少一所述对摆臂受力机构和至少一所述回弹机构。
22、本发明所述的基于惯性的动力装置至少包括底板、一对摆臂、一对摆臂驱动机构、一对摆臂受力机构和回弹机构;第一、第二摆臂驱动机构分别驱动第一、第二摆臂进行摆动运动;第一摆臂受到第一摆臂驱动机构的动力驱动在第一摆臂受力机构和回弹机构之间摆动,当第一摆臂施力机构撞击第一摆臂受力机构时,对第一摆臂受力机构施加向下的驱动力,第一摆臂机构受力后向上转动;第二摆臂受到第二摆臂驱动机构的动力驱动在第二摆臂受力机构和回弹机构之间摆动;当第二摆臂施力机构撞击第二摆臂受力机构时,对第二摆臂受力机构施加向下的驱动力,第二摆臂机构受力后向上转动。借此,本发明能够利用物体运动的惯性提供动力,能量转换效率更高,且应用范围广泛。由于第一、第二摆臂运动的惯性可以在弧形滑动载体反复运动,第一、第二摆臂机构受力分别受到第一、第二摆臂的向下的驱动力,因此基于惯性的动力装置可作直线运动。借此,本发明能够利用第一、第二摆臂运动的惯性提供动力,能量转换效率更高。本发明基于惯性的动力装置可为船舶、车辆、飞机和火箭、航天器等提供动力,应用范围十分广泛。本发明基于惯性的动力装置还可具有如下优有:一是可以密封设计,可以用用于任何技术领域,如空气、液体、真空中。二是不需要对外做功,因此更加环保。三是可以将内部抽成真空,增加转换率发展趋势好。
- 还没有人留言评论。精彩留言会获得点赞!