一种中小型风力机后倾角自动调节机构的制作方法
本技术涉及风力机,具体指一种中小型风力机后倾角自动调节机构。
背景技术:
1、目前,偏远农牧区使用的大部分小型风力发电机无自动保护装置,在风速过大、发电机过电压或过热的情况下,主要是靠人工操作的办法使风力发电机整体旋转偏航后进行刹车保护。这给用户的使用带来很多不便。自然界中的风,风向和风速时刻都在发生变化,往往难以预料。风能的这种随意性和不稳定性给风能的开发利用带来很多难题。当风速超过风力发电机的额定风速范围后,会造成风力发电机叶片、发电机、塔架等部件的严重损坏,现有的保护装置可靠性差,经常发生强风吹断叶片、发电机由于过高转速而烧毁等事故。
2、为了提高中小型风力发电机安全性、可靠性并缩小体积,目前配套的是被动式无自动保护装置,即被动式偏航机构。该偏航机构一般利用尾翼斜置侧偏风轮原理,提高风力发电机的稳定性和可靠性。中小型风力发电机设计三个重要结构参数,即:⑴风轮的仰角β(亦称后倾角);⑵风轮轴与回转体中心偏心距e;⑶尾翼侧倾角φ。在制作风力发电机时,必须严格按设计风轮的仰角β、风轮轴与回转体中心偏心距e以及尾翼侧倾角φ的参数制造回转体,这是提高中小型风力发电机调速机构准确调速的重要保障。
3、其中,尾翼与回转体上的尾翼连接轴套通过销轴连结,而此销轴在安装时即有一个设计好的空间后倾角和侧倾角,由于这一空间后倾角和侧倾角的存在,当风轮偏转调速时,尾翼逐渐翘起,翘起的尾翼在自重力的作用下,企图恢复到原来位置,一旦风速减小到某一个值时,在尾翼重力产生的恢复力矩作用下,即可迫使尾翼回到原来位置,使风轮迎风继续旋转。
4、在中小型风力发电机实际应用中,由于实际风况的不确定性,风速、风向的瞬时变化,往往使风力发电机不能做出及时反映,致使风机损坏。当自动调向限速后还需进一步对风力发电机的风轮进行刹车控制。只有这样,才可使风力发电机的风轮彻底停转,最终实现对风力发电机的真正保护。而且,当超过额定风速范围后,因超负荷会危及风力机安全运行,风力发电机所带的负载时高时低的变化,也同样会危及风力机安全。
5、所以,对中小型风力发电机组的调速要求是,在额定风速及高于额定风速的某个风速区段范围内,使风轮保持一个比较稳定的转速过程。其调速的目的在于:1.使风轮不超速运转以保证机件机组的安全性、可靠性和使用寿命;2.在风轮转速的波动下,严格控制确保供电品质;3.在风轮转速的波动下,不使输出功率大幅度起落;4.在风速突变的情报况下,使偏航机构提前改变风机作业状况,有力保护风机安全。
技术实现思路
1、本实用新型要解决的技术问题是提供一种中小型风力机后倾角自动调节机构,这种自动调节机构针对上述目前风机自动限速系统不能够在风速超过额定风速范围时限制叶片转速和发电机输出功率的问题,通过改变尾翼后倾角,使风力发电机的风轮提前降低转数,加强运行的稳定性、安全性和可靠性,最终提高风力发电机的使用寿命。
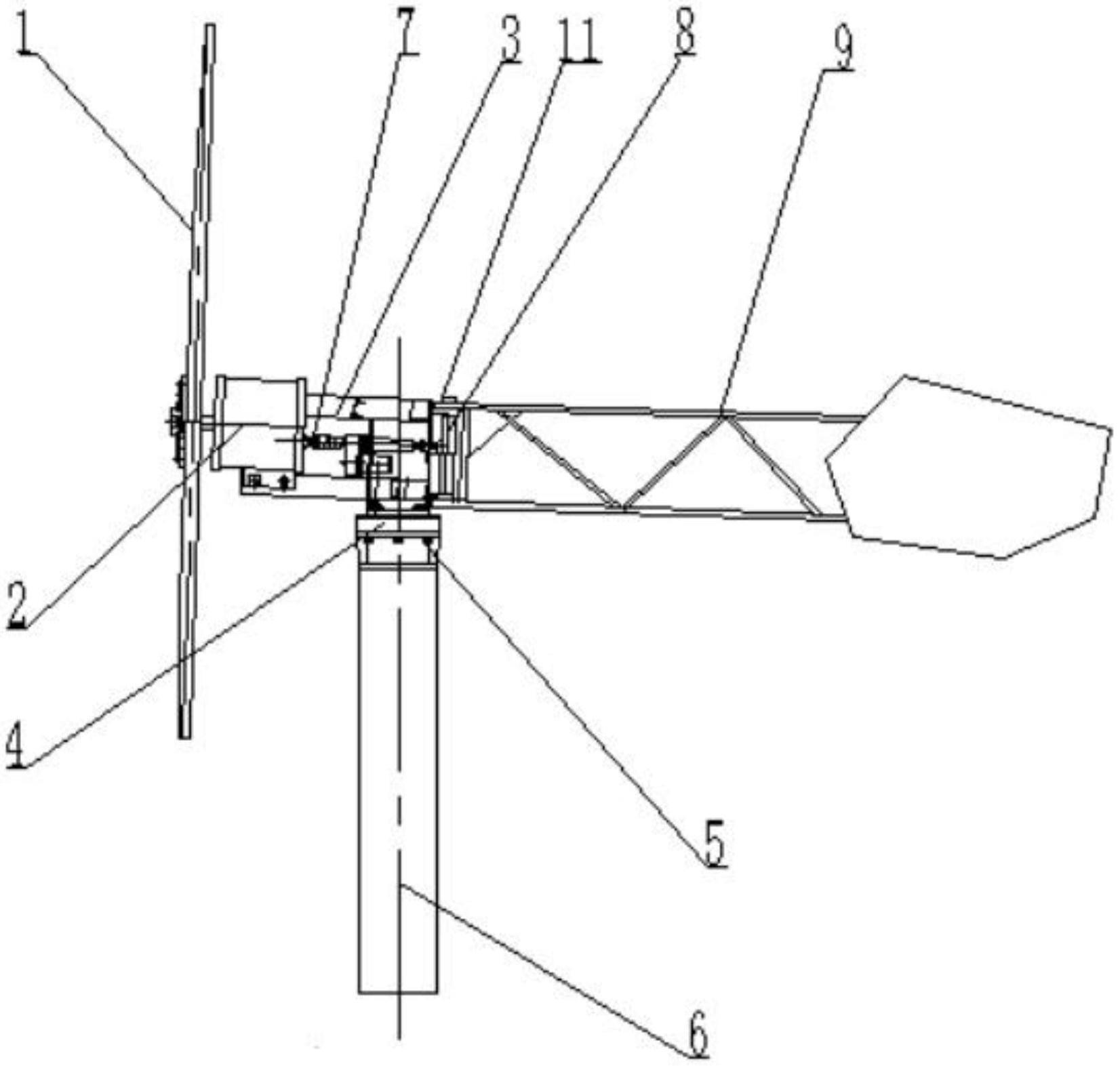
2、本实用新型要解决的技术问题由以下结构来实现:一种中小型风力机后倾角自动调节机构,安装在回转体、回转体连接支架上,位于风轮、发电机后部,所述回转体通过固定螺栓固定在回转体轴承座上,所述回转体轴承座通过固定螺栓固定在塔架上端。本自动调节机构结构还包括后倾角调节机构、尾翼回转连接轴套、尾翼、后倾角β。
3、所述后倾角调节机构包括后倾角调节机构支架、铰链、电推杆、连接杆。
4、所述尾翼回转连接轴套位于所述回转体后端,下端通过铰接轴a与回转体下端相连,可绕铰接轴a前后转动,所述尾翼通过销轴与尾翼回转连接轴套相连。所述尾翼回转连接轴套作用是,可改变尾翼后倾角β,所述后倾角β是尾翼回转连接轴套与回转体中心线的夹角。当电推伸缩杆向前推动时,可使尾翼回转连接轴套绕铰接轴a向外转动,增大尾翼后倾角,使风力发电机进入正常调速运行;当电推伸缩杆向后收缩时,可使尾翼回转连接轴套绕铰接轴a向后转动,减小尾翼后倾角,使尾翼提前并尾直至停止运行发电;一般后倾角β设定为2°~25°。
5、所述电推杆驱动电机集成在风力发电机控制器中进行自动控制,其作用是驱动电推伸缩杆伸缩。电推杆包括电推杆驱动电机、电推伸缩杆;一端通过连接杆、铰链与后倾角调节机构支架相连,电推杆另一端通过电推伸缩杆与铰接轴b相连。所述铰接轴b与尾翼回转连接轴套相连。所述电推伸缩杆作用是,前后伸缩推拉尾翼回转连接轴套绕铰接轴b运动。
6、后倾角最大限位块安装在回转体下端,其作用是限定电推伸缩杆向外推动尾翼回转连接轴套的行程,以便使后倾角达到最大设定值:后倾角最小限位块焊接在回转体上,靠近尾翼回转连接轴套一侧,其作用是限定电推伸缩杆向内拉动尾翼回转连接轴套的行程,以便使后倾角达到最小设定值。
7、本自动调节机构的工作过程是:电推杆是由风力机主控制器(mcu)控制,即,微控制单元(microcontroller unit)。其作用是通过测量元件,同时接收来自风力发电机电压采样输入和接收电池电压采样输入,通过控制电路连接驱动模块,控制充电模块在风力发电机在输出电压小于规定值时充电;采集风力发电机发出的电压、电流数据,通过控制逻辑采用pid算法,利用pid算法可以一方面保证风力发电机处于最佳功率点发电;另一方面,防止因发电机发出的功率超出额定功率而损坏。
8、其中,pid算法如图所示,输入为设定功率(风力发电机额定输出功率);测量元件为检测风力发电机输出电压、输出电流计算出实际功率执行机构为直流调压电路;输出电流驱动电动推杆驱动电机。
9、工作中,一般情况下,β角固定为一个定值,β角保持在3°~25°之间。当风力机主控制器(mcu)检测到风力发电机输出功率大于其额定功率120%时或发电机转速大于其额定转速率120%时,启动电推杆驱动电机运行,并向内收缩电推伸缩杆,向内拉动尾翼回转连接轴套以便减小后倾角,实现提前尾翼并尾,使风轮转速降低;当需要恢复正常时,系统自动向外伸展电推活动杆,逐渐增大后倾角,直到尾翼回转连接轴套接触到最大后倾角定位块时,让尾翼释放,恢复正常发电。反之,当风力机主控制器(mcu)检测到风力发电机输出功率小于其额定功率80%时或发电机转速小于其额定转速率80%时,系统启动电推杆驱动电机运行,并向外伸展电推伸缩杆,向外推动尾翼回转连接轴套增大后倾角,实现正常调速运行。当有预警超强风即将来临时,也可提前改变β角,使其减小,进而使风力机提前并尾停止运行。
10、本自动调节机构的优点在于:1.实现风力机主动偏航及主动停机的目的,确保风力机运行平稳可靠,当有预警超强风即将来临时,也可提前改变β角,使其减小,进而使风力机提前并尾。即使在风速以及负载变化大的情况下,避免“飞车”毁机事故发生;2.工作中,只需改变后倾角即可实现调速之目的。无需同时改变侧倾角和后倾角;3.可以实现远程控制。用户只要将风力发电机额定输出功率设定值输入mcu,即可使风力发电机实现自动偏航控制;4.结构简单,重量轻,安装制作方便;5.后倾角的一般设定参数可通过调节电推杆行程限位块以及调节后倾角最大螺旋限位块即可;6.本调节机构可适于0.5kw~30kw各种中小型风力机中应用。
- 还没有人留言评论。精彩留言会获得点赞!