风电机组及基于单点激光雷达的风电净空测量系统的制作方法
1.本实用新型涉及风力发电领域,具体而言,涉及一种风电机组及基于单点激光雷达的风电净空测量系统。
背景技术:
2.随着风力发电技术的发展,风电机组的叶片越来越长,意味着叶片越来越柔软,在旋转过程中变形非常大,存在打到塔筒带来危险,因此,有必要实时监控风电机组叶片与塔筒之间的距离,即叶片下叶尖到塔筒外壁的净空距离。
3.现有的测量方案包括视频测量、雷达测量、红外测量以及激光测量等。其中,雷达测量以其结构简单,不易受天气影响、测量精度高等优点而得到广泛的应用。
4.例如现有技术202022359515.4公开了一种叶片间距测量系统、风电设备,其公开了如下方案:一种叶片间距测量系统包括叶片、机舱和塔筒,还包括:雷达模块,设置在机舱上,雷达模块的信号发射端朝向叶片设置;控制模块,设置在机舱和/或塔筒上,用以控制雷达模块。本实用新型通过在机舱上设置雷达模块,雷达模块的信号发射端朝向叶片设置,信号发射端发出的电磁波被叶片阻挡后返回到雷达模块的信号接收端,通过雷达的测距原理即可计算出叶片到塔筒的距离,采用雷达测距的方式相比于摄像头拍摄的方式成本低,且不易受外界天气的影响,测量精度高。
5.然而202022359515.4仍然存在一些缺陷,包括:
6.1、202022359515.4将毫米波雷达安装在机舱位置,在已知塔筒与雷达的相对位置,通过雷达与叶尖的距离,以及雷达的发射角,计算出塔筒与叶片的距离,其计算过程较复杂,且计算式中有两个待测量,误差增大。
7.2、202022359515.4使用的是毫米波雷达,雨雾对其测量性能的影响非常大,吸收很厉害,所以在有雨有雾的天气,毫米波雷达的性能会大大下降。
8.3、202022359515.4将雷达安装于机舱位置,而一般情况下,每片叶片长度为100m,其真实测量的距离远大于100m,在雨雾天气由于信号衰减很大,难以保证测量精度。
技术实现要素:
9.有鉴于此,本实用新型的目的在于提供一种风电机组及基于单点激光雷达的风电净空测量系统,以改善上述问题。
10.本实用新型实施例提供了一种风电机组,包括机舱、与所述机舱连接的塔筒以及多个叶片;其还包括:
11.多个单点激光雷达,安装在各个叶片的尖端处,且其探测方向配置为朝向所述塔筒,以测量叶片的尖端与所述塔筒之间的距离;
12.无线发射模块,适于安装在风电机组上,并与各个单点激光雷达均电连接,并将所述距离通过无线的方式发送至远程连接的监控终端。
13.优选地,所述单点激光雷达的探测方向垂直于塔筒的轴向。
14.优选地,所述单点激光雷达的探测频率大于等于n*f;其中,n为探测的点数,f=v/d;其中,v为叶片尖端转速,d为塔筒直径。
15.优选地,还包括电池模块,所述电池模块设置在叶尖,并与各个单点激光雷达电连接。
16.优选地,还包括电池模块,所述电池模块设置在叶片与机舱连接的一端,并通过导线与位于叶片尖端的各个单点激光雷达电连接。
17.优选地,所述单点激光雷达通过螺丝固定在叶片内部,所述叶片在单点激光雷达的安装处设置有开孔作为光学窗口。
18.优选地,所述单点激光雷达通过胶黏剂固定在叶片内部,所述叶片在单点激光雷达的安装处设置有开孔作为光学窗口。
19.本实用新型还提管理一种基于单点激光雷达的风电净空测量系统,其包括监控终端以及如上述的风电机组;所述监控终端包括无线接收模块以及上位机;所述无线接收模块与所述无线发射模块无线连接,用于接收由无线发射模块传输的距离,并发送给所述上位机。
20.优选地,所述监控终端还包括警报器,所述警报器与所述上位机电连接;所述上位机配置为在距离大于预设的安全净空距离时,控制所述警报器发出警报。
21.综上所述,本实施例相较于现有技术有如下优点:
22.1、本实施例将单点激光雷达安装在叶尖位置,直接测量与塔筒间的距离,计算过程简单直接,且误差较小;
23.2、相较于毫米波雷达,本实施例采用的单点激光雷达的探测精度高;
24.3、本实施例直接测量叶尖距离塔筒的垂直距离,一般情况下为4m左右,测量难度小,距离短,雨雾对其的衰减也变少,测量结果更加精确;
25.4、本实施例对激光雷达的性能要求不高,所用的激光雷达成本低。
附图说明
26.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
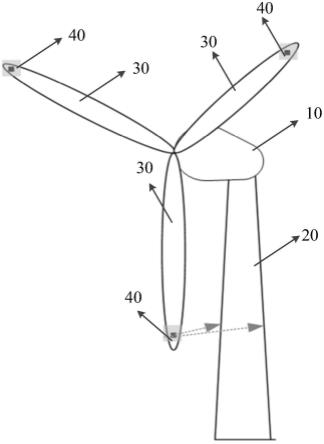
27.图1是本实用新型第一实施例提供的风电机组的结构示意图。
28.图2是单点激光雷达的测量原理示意图。
29.图3是本实用新型第二实施例提供的基于单点激光雷达的风电净空测量系统的结构示意图。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.为了更好的理解本实用新型的技术方案,下面结合附图对本实用新型实施例进行详细描述。
32.应当明确,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
33.在本实用新型实施例中使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本实用新型。在本实用新型实施例和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。
34.下面结合附图与具体实施方式对本实用新型作进一步详细描述:
35.请参阅图1至图3,本实用新型第一实施例提供了一种风电机组100,包括机舱10、与所述机舱10连接的塔筒20以及多个叶片30;其还包括:
36.多个单点激光雷达40,安装在各个叶片30的尖端处,且其探测方向配置为朝向所述塔筒20,以测量叶片30的尖端与所述塔筒20之间的距离。
37.在本实施例中,一般的,每个风电机组包括3个叶片30,也就意味着至少需要3个单点激光雷达40。其中,每个单点激光雷达40的探测方向配置为朝向所述塔筒20,且特别的,垂直于塔筒20的轴向。当然,也可以设置成与塔筒20具有预定的角度,在计算距离时再进行相应的角度换算即可,这些方案都在本实用新型的保护范围之内。
38.在本实施例中,一般来说叶片30的尖端为玻璃钢材质,由于叶片30的尖端线速度过快,因此需要对所述单点激光雷达40进行固定。
39.在一种实现方式中,所述单点激光雷达40通过螺丝固定在叶片30的内部,且所述叶片30在单点激光雷达40的安装处设置有开孔作为光学窗口。
40.在另一种实现方式中,所述单点激光雷达40通过胶黏剂固定在叶片内部,所述叶片30在单点激光雷达40的安装处设置有开孔作为光学窗口。
41.当然,还可以有其他的固定安装方式,本实用新型不做具体限定。
42.在本实施例中,单点激光雷达40在工作时能通过激光发射模块发射激光束,该激光束在被塔筒20击中后被反射回来并被激光接收模块接收和处理,根据激光发射时间和接收时间可以获得激光的飞行时间,再根据飞行时间和光的传播速度即可以计算叶片30的尖端与塔筒20之间的距离。
43.在本实施例中,为了保证在叶片30的尖端经过塔筒20处能发射出激光,需对其探测频率进行设置。
44.其中,所述单点激光雷达30的探测频率大于等于n*f;其中,n为叶片30的数量,f=v/d;其中,v为叶片30的尖端转速,d为塔筒20直径。
45.具体地,如图2所示,设叶片30的转速为10r/min,长度为100m,则叶片30的末端转速v为:
46.v=2π
×
100m
×
10r/60s=100m/s
47.设塔筒20直径为d为4.5m,则尖端通过塔筒20所用时间为:
48.t=d/100m/s=4.5/100=0.045s
49.若在塔筒直径d距离内只探测一点,则需要探测的脉冲频率需满足:
50.f》1/t=22hz
51.通常情况下需探测三点,则所用雷达的探测频率需要大于66hz。
52.即当单点激光雷达40的探测频率大于66hz时,单点激光雷达40在叶尖经过塔筒20的这段距离可测三个数据(即叶片30的尖端到塔筒20的距离),提高测试结果的可靠性。
53.而单点激光雷达40在低功耗模式下探测频率为1-100hz,完全满足方案需求。
54.无线发射模块50,适于安装在风电机组上,与各个单点激光雷达40均电连接,并将所述距离通过无线的方式发送至远程连接的监控终端。
55.在本实施例中,所述无线发射模块50可以为物联网模块,如lora模块,nb-iot模块,也可以是wifi模块、3/4/5g模块等,本实用新型不做具体限定。其中,所述无线发射模块50也可以安装在尖端处,其通过设定的接口与单点激光雷达40电连接,以获得单点激光雷达40采集的距离,并将所述距离通过无线的方式发送至远程连接的监控终端。
56.在本实施例中,还需要电池模块60对单点激光雷达40以及无线发射模块50进行供电。其中,电池模块60的安装方式有两种:
57.对于不需要特别长的供电时间,则此时由于电池体积较小,可以直接将电池模块60安装在尖端处。
58.此种情况下,当单点激光雷达40的探测频率为100hz时,功耗为100mw,若配置电池模块的容量为5000mah,则电流i=p/u=100mw/5v=20ma,供电时长t=5000/20=250h。
59.若要延长供电时长,可使用大容量的电池模块60。考虑到叶尖位置不宜安装过重的装置,可将大容量电池安装至叶片30的终端(即叶片30与机舱10连接的一端),通过导线连接到位于叶尖的单点激光雷达40。
60.综上所述,本实施例相较于现有技术有如下优点:
61.1、本实施例将单点激光雷达40安装在叶尖位置,直接测量与塔筒20间的距离,计算过程简单直接,且误差较小;
62.2、相较于毫米波雷达,本实施例采用的单点激光雷达的探测精度高;
63.3、本实施例直接测量叶尖距离塔筒20的垂直距离,一般情况下为4m左右,测量难度小,距离短,雨雾对其的衰减也变少,测量结果更加精确;
64.4、本实施例对激光雷达的性能要求不高,所用的激光雷达成本低。
65.请参阅图3,本实用新型第二实施例还提供了一种基于单点激光雷达的风电净空测量系统,其包括监控终端200以及如上述的风电机组100;所述监控终端200包括无线接收模块210以及上位机220;所述无线接收模块210与所述无线发射模块无线连接,用于接收由无线发射模块传输的距离,并发送给所述上位机220。
66.特别的,所述监控终端200还包括警报器230,所述警报器230与所述上位机220电连接;所述上位机220配置为在距离大于预设的安全净空距离时,控制所述警报器230发出警报。
67.其中,特别的,由所述单点激光雷达40采集的距离信号传输至监控终端220后,上位机220对其进行转换处理,并识别异常数据。假设安全净空距离d为4m,若所述单点激光雷达40测得的距离小于4m,则与上位机220相连的警报器230直接报警,如发出声光警报。
68.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1