基于模糊PID的台风条件下风浪流涌耦合载荷控制方法与流程
本发明涉及风电机组变桨及载荷控制的,尤其是指基于模糊pid的台风条件下风电机组风浪流涌耦合载荷控制方法。
背景技术:
1、塔架作为风电机组中主要的承载部件,要承受多种载荷的共同作用。在机组大型化的发展趋势下,叶轮直径和塔架高度不断增大,在风速、方向、风切变极端变化的极端风况下,叶轮受到剧烈变化的气动推力,进而极大引起塔架载荷的极端变化。因此,日趋大型化的机组在极端风况下,叶轮受力不均匀更加明显,塔架承受的载荷增大,塔架振动更加剧烈,甚至有发生倒塔的风险。为保证机组安全稳定运行,除了在设计时采用更高强度的塔架,还可以通过改进风电机组控制方式,优化机组的控制策略,以抑制塔架振动、减小塔架受到的载荷。
2、极端风况包括极端运行阵风、极端风向变化、极端相关阵风、极端风切变以及台风等风况。目前针对由极端风况等引起的塔架过载的控制方法主要方法有阻尼控制和桨距角控制。其中,阻尼控制通过施加外部阻尼使塔架固有频率与外部扰动的频率分开,从而减小机组在遭受极端风况时的振动幅度,进而降低塔架的载荷;另一方面,变桨控制通过调节叶片的桨距角,有效降低叶轮受到的气动推力,进而降低塔架载荷,其中,统一变桨是根据发电机的功率值来给定变桨角度,以满足功率值恒定和载荷的要求;独立变桨则是根据叶片所处的绝对位置,分别对各叶片进行单独的桨距角调节,有效减小风轮所受的不平衡载荷。
3、此外,现有文献研究了极端风况下的塔架载荷控制策略,如通过变桨系统参数优化降低阵风下极限载荷、基于叶片方位角和载荷反馈的独立变桨距控制、基于激光雷达测风的前馈控制等。然而,其中极少有针对台风的极端风况下风浪流涌耦合的海上机组载荷进行控制策略的深入研究,因此,有必要研究台风条件下风浪流涌耦合的风电机组塔架载荷控制策略,减小海上风电塔架在台风条件下的受到的极限载荷,保证机组运行的安全性。
技术实现思路
1、本发明的目的在于为解决现有技术中的不足,提供了基于模糊pid的台风条件下风浪流涌耦合载荷控制方法及系统,针对大型海上风力发电机组在极端风况条件下变桨系统延迟响应的问题,基于模糊控制理论并考虑台风下的风浪流涌耦合特征,设计基于模糊pid的变桨控制策略,从而控制载荷。
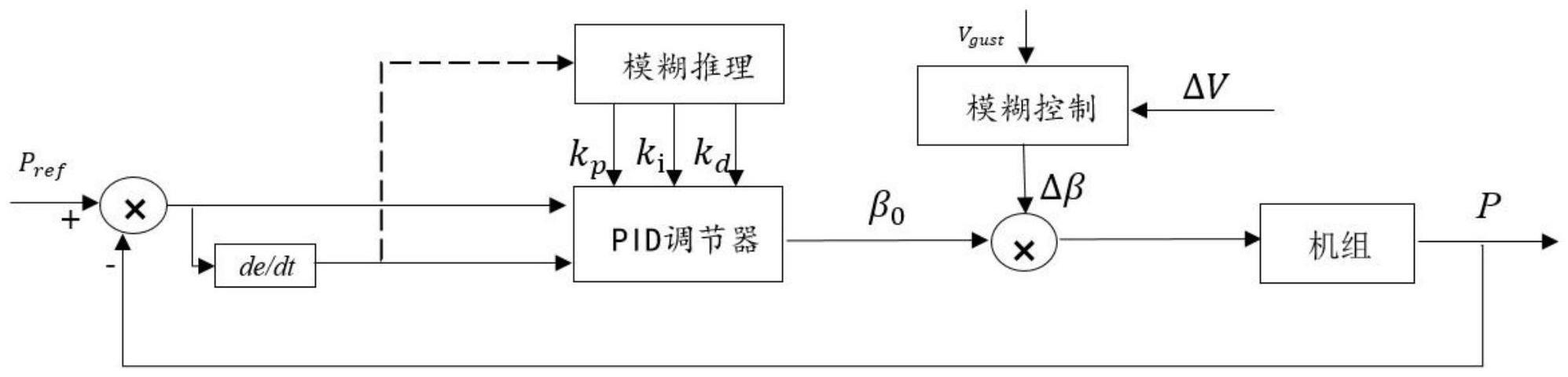
2、本发明的目的通过下述技术方案实现:基于模糊pid的台风条件下风浪流涌耦合载荷控制方法,该方法是针对机组建立模糊pid参数自适应控制器,以机组功率为被控量,机组的功率实际值和功率给定值的偏差以及其偏差变化率为输入,通过预设的模糊推理规则实现机组变桨系统pid控制器的调节参数kp、ki、kd的自适应调整,使机组变桨系统pid控制器输出适合当前时刻风况的桨距角β0;同时建立风速-桨角模糊控制器,风速-桨角模糊控制器以风速为输入,通过模糊控制规则输出相应的桨距角增量δβ,使该桨距角增量δβ与机组变桨系统pid控制器所输出的桨距角β0进行叠加,进而得到桨距角调节信号,控制机组变桨系统提前动作,进而减少机组在极端风况所导致风浪流涌耦合的情况下受到的极限载荷。
3、进一步,所述模糊推理规则包括:
4、定义机组的功率实际值和功率给定值的偏差e的模糊语言值有7个:{负大,负中,负小,零,正小,正中,正大},简记为{nb,nm,ns,z,ps,pm,pb},其对应的模糊子集的论域为{-3,-2,-1,0,1,2,3};定义偏差变化率ec的模糊语言值有7个:{负大,负中,负小,零,正小,正中,正大},简记为{nb,nm,ns,z,ps,pm,pb},其对应的模糊子集的论域为{-6,-4,-2,0,2,4,6};
5、表1为kp的模糊控制规则表:
6、
7、表2为ki的模糊控制规则表:
8、
9、表3为kd的模糊控制规则表:
10、
11、根据模糊pid参数自适应控制器的控制目的选择输出变量kp、ki、kd。
12、进一步,所述模糊控制规则包括:
13、定义风速-桨角模糊控制器所输入的风速v的模糊语言值有5个:{非常高,很高,高,较高,略高},简记为{eh,vh,h,rh,lh},其对应的模糊子集的论域为{1,2,3,4,5};定义风速偏差δv的模糊语言值有7个:{负大,负中,负小,零,正小,正中,正大},简记为{nb,nm,ns,z,ps,pm,pb},其对应的模糊子集的论域为{-3,-2,-1,0,1,2,3};
14、风速-桨角模糊控制器输出为桨距角增量δβ的模糊语言值有7个:{负大2,负大1,负中2,负中1,负小2,负小1,零,正小1,正小2,正中1,正中2,正大1,正大2},简记为{nb2,nb1,nm2,nm1,ns2,ns1,z,ps1,ps2,pm1,pm2,pb1,pb2},其对应的模糊子集的论域为{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6};
15、表4为桨距角增量δβ的模糊控制规则表:
16、
17、通过上述模糊控制规则输出相应的桨距角增量δβ。
18、本发明所提供的基于模糊pid的台风条件下风浪流涌耦合载荷控制系统,包括:
19、模糊pid参数自适应控制器,用于通过模糊推理规则实现机组变桨系统pid控制器的调节参数kp、ki、kd的自适应调整;
20、机组变桨系统pid控制器,用于输出适合当前时刻风况的桨距角β0;
21、风速-桨角模糊控制器,用于通过模糊控制规则输出相应的桨距角增量δβ;
22、桨距角叠加模组,用于将桨距角增量δβ与桨距角β0叠加后作为机组变桨系统的变桨给定值。
23、进一步,所述模糊pid参数自适应控制器执行以下步骤:
24、以机组功率为被控量,机组的功率实际值和功率给定值的偏差以及其偏差变化率为输入,通过预设的模糊推理规则实现机组变桨系统pid控制器的调节参数kp、ki、kd的自适应调整,使机组变桨系统pid控制器输出适合当前时刻风况的桨距角β0;
25、所述模糊推理规则包括:
26、定义机组的功率实际值和功率给定值的偏差e的模糊语言值有7个:{负大,负中,负小,零,正小,正中,正大},简记为{nb,nm,ns,z,ps,pm,pb},其对应的模糊子集的论域为{-3,-2,-1,0,1,2,3};定义偏差变化率ec的模糊语言值有7个:{负大,负中,负小,零,正小,正中,正大},简记为{nb,nm,ns,z,ps,pm,pb},其对应的模糊子集的论域为{-6,-4,-2,0,2,4,6};
27、表5为kp的模糊控制规则表:
28、
29、表6为ki的模糊控制规则表:
30、
31、表7为kd的模糊控制规则表:
32、
33、根据模糊pid参数自适应控制器的控制目的选择输出变量kp、ki、kd。
34、进一步,所述风速-桨角模糊控制器执行以下步骤:
35、风速-桨角模糊控制器以风速为输入,通过模糊控制规则输出相应的桨距角增量δβ;
36、所述模糊控制规则包括:
37、定义风速-桨角模糊控制器所输入的风速v的模糊语言值有5个:{非常高,很高,高,较高,略高},简记为{eh,vh,h,rh,lh},其对应的模糊子集的论域为{1,2,3,4,5};定义风速偏差δv的模糊语言值有7个:{负大,负中,负小,零,正小,正中,正大},简记为{nb,nm,ns,z,ps,pm,pb},其对应的模糊子集的论域为{-3,-2,-1,0,1,2,3};
38、风速-桨角模糊控制器输出为桨距角增量δβ的模糊语言值有7个:{负大2,负大1,负中2,负中1,负小2,负小1,零,正小1,正小2,正中1,正中2,正大1,正大2},简记为{nb2,nb1,nm2,nm1,ns2,ns1,z,ps1,ps2,pm1,pm2,pb1,pb2},其对应的模糊子集的论域为{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6};
39、表8为桨距角增量δβ的模糊控制规则表:
40、
41、通过上述模糊控制规则输出相应的桨距角增量δβ。
42、本发明所提供的一种存储有指令的非暂时性计算机可读介质,当所述指令由处理器执行时,执行根据上述的基于模糊pid的台风条件下风浪流涌耦合载荷控制方法的步骤。
43、本发明所提供的一种计算设备,包括处理器以及用于存储处理器可执行程序的存储器,所述处理器执行存储器存储的程序时,实现上述的基于模糊pid的台风条件下风浪流涌耦合载荷控制方法。
44、本发明与现有技术相比,具有如下优点与有益效果:
45、1、本发明应用模糊控制理论,以功率稳定性为目标对机组变桨系统pid控制器的参数进行自适应调节,改善变桨系统在极端风况下的控制效果,使功率输出更加稳定平滑;
46、2、本发明通过模糊推理规则确定极端风况下的桨距角增量,与机组变桨系统pid控制输出的桨距角叠加作为台风等极端风况下变桨系统的变桨给定值,有效改善大型海上风电机组在台风工况风浪流涌耦合下的塔架载荷过大以及功率波动的问题。
- 还没有人留言评论。精彩留言会获得点赞!