一种风电机组的变桨协调优化控制方法与流程
本发明属于风力发电机组控制,具体涉及的是一种风电机组的变桨协调优化控制方法。
背景技术:
1、作为大型风力发电机组中的主要控制系统,偏航控制和变桨距控制在风力发电过程中起着至关重要的作用,直接关系到整个机组的性能。偏航控制系统主要驱动机舱转动,使风轮所在面与风向保持垂直,从而使风能利用达到最大化。在风电机组实际工作过程中,一是某些机械结构由于不可抗力导致静态偏差,使偏航控制系统不能精准对风,从而导致机组输出功率下降。二是偏航控制系统存在动态误差,由于偏航控制器存在偏航偏差阈值和延迟时间,往往在一段时间内平均风向与机舱夹角超过一定值时,偏航系统才会开始校正,从而导致偏航控制滞后,引起动态误差。变桨距控制系统是通过控制叶片桨距角的大小来改变风电机组的风能利用系数,使风电机组尽可能的在额定功率附近稳定输出。
2、目前大型风力发电机组往往采用变速变桨距控制,主要分为以下两个阶段:
3、阶段一是当风速低于额定风速时,主要通过调整偏航角度来获得最大风能捕获,此时桨距角一般处于最佳水平;
4、阶段二是当风速高于额定风速时,此时需要控制桨距角来保持机组的输出在额定功率附近。常规控制往往存在控制精度低,控制滞后等问题,
5、因此需要一种可靠的变桨控制方法,使风速高于额定风速时,机组恒功率输出。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种风电机组的变桨协调优化控制方法,解决了现有技术中对于桨距角的控制方式控制精度低,控制滞后等技术问题。
2、为了解决上述问题,本发明的技术方案为:一种风电机组的变桨协调优化控制方法,包括以下步骤:
3、第一步,获取风电场的scada系统历史数据,所述风电场的scada系统历史数据满足:第一、风速超过机组的额定风速,第二、剔除奇异样本数据;
4、第二步,基于bp神经网络对所述scada系统历史数据进行训练,建立风电机组模型;
5、第三步,以现场的实际数据验证所述风电机组模型的准确性;
6、第四步,基于改进粒子群寻优算法,对变桨pid控制器的参数进行寻优;
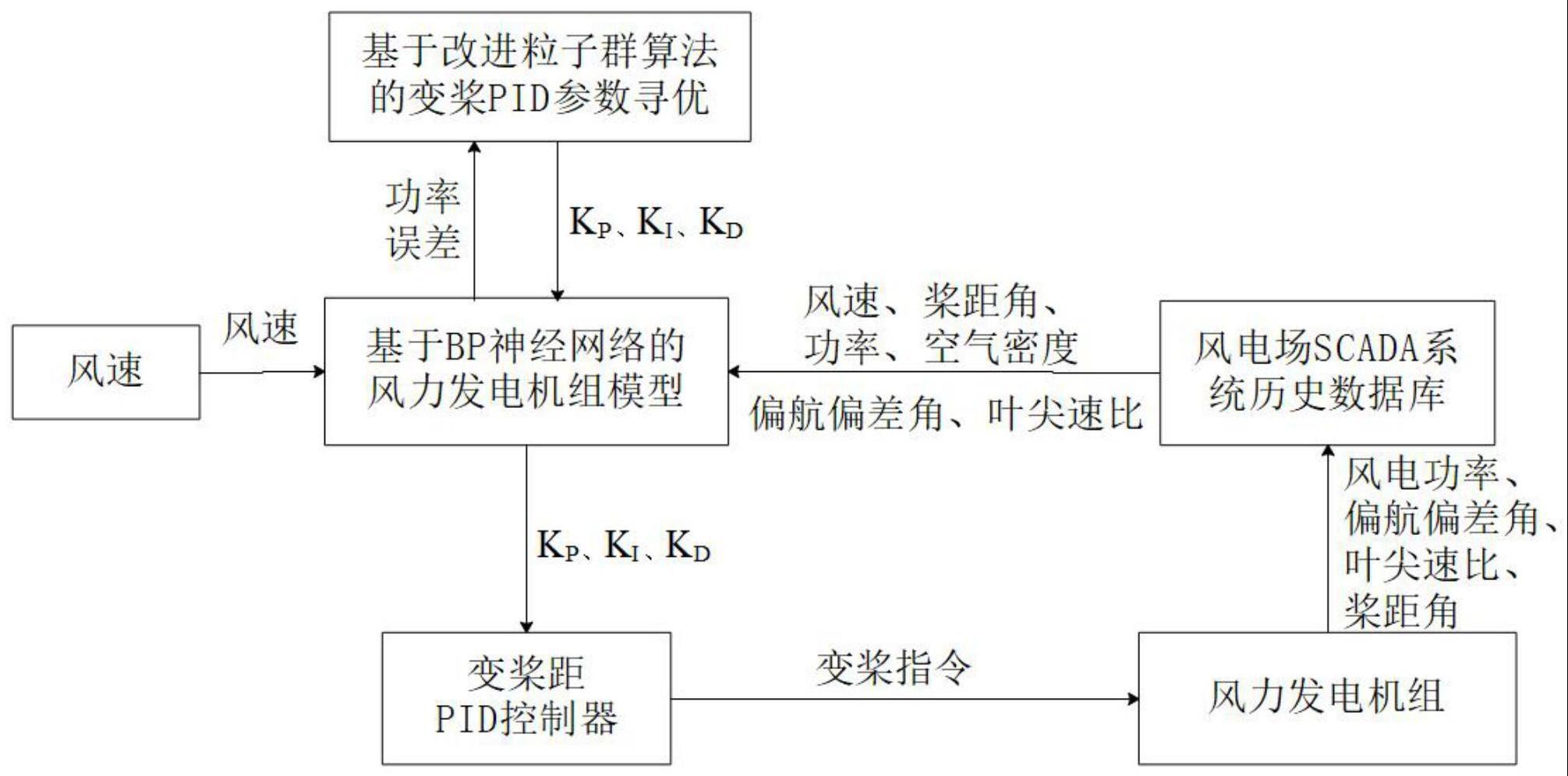
7、第五步,将所述改进粒子群寻优算法的寻优结果,带入到所述风电机组模型中,评价系统输出性能,分析寻优结果是否满足寻优算法终止迭代条件,若满足终止迭代条件,则风电机组模型根据所述寻优结果生成变桨控制指令发送到风电机组变桨pid控制器以执行对风电机组的变桨控制;若不满足终止迭代条件,则粒子群寻优算法继续执行寻优指令,直至满足终止迭代条件。
8、可选地,所述风电机组模型选择五输入一输出模型,输入为风速、偏航偏差角、叶尖速比、桨距角和空气密度,输出为风力发电机组输出功率。
9、可选地,风电机组模型中,输入层的节点为5,输出层的节点为1,隐含层的节点为4。
10、可选地,对所述scada系统历史数据进行零初始值处理,零初始值的处理原则为:
11、
12、
13、上式中,n代表零初始点的个数。一般取4~6点;u(k)代表模型输入参数的历史数据,u*(k)代表经过零初始值处理过后的模型输入数据,u(i)代表各输入量的零初始点数据;y(k)代表模型输出参数的历史数据,y*(k)代表经过零初始值处理过后的模型输出数据,y(i)代表各输入量的零初始点数据。
14、可选地,n的取值为5。
15、可选地,零初始值处理后的scada系统历史数据中,80%用于模型训练,剩余的20%用于bp神经网络模型的验证。
16、可选地,在第四步中,所述的改进粒子群寻优算法为带惯性权重的改进型粒子群算法,在寻优过程中,粒子不断更新自己的位置信息xi和速度信息vi,并且在更新过程中根据适应度值来评价解的品质,之后通过跟踪粒子的个体最优值和粒子种群全局最优值,在全局中寻找最优解。
17、可选地,所述的改进粒子群寻优算法中,首先设置参数运动范围,适应度函数设置为时间乘以绝对误差积分准则,粒子的位置和速度更新公式为:
18、
19、vij(t+1)=vij(t)+c1r1[xbesti-xij(t)]+c2r2[xbestgj-xij(t)]
20、上式中,i=1,2,···,m,j=1,2,···,n,t为当前时刻,c1表示认知因子,c2表示社会因子,r1,r2为[0,1]之间的随机整数;学习因子设置c1=2,c2=2;惯性权重:ωmax=1.2,ωmin=0.8;粒子速度:vmax=1,vmin=-1;
21、引入惯性权重w,粒子速度更新为:
22、vij(t+1)=wvij(t)+c1r1[xbestij-xij(t)]+c2r2[xbestgj-xij(t)]
23、惯性权重w代表上一时刻速度信息在当前速度信息中所占的比例;寻优引入非线性自适应惯性权重策略对w进行调整,公式如下:
24、
25、式中,qi为当前粒子的适应度值,qbestg为种群最优位置对应的适应度值,qavg为当前所有粒子的平均适应度值。
26、可选地,所述的改进粒子群寻优算法对pid控制器内的三个控制参数kp、ki、kd进行寻优,改进粒子群寻优逻辑的步骤包括:
27、第一步,开始;
28、第二步,初始化种群和设置参数;
29、第三步,产生粒子群;
30、第四步,粒子依次赋值给kp、ki、kd;
31、第五步,运行控制系统模型;
32、第六步,输出性能指标;
33、第七步,若不满足迭代终止条件,进行粒子群更新操作后返回到第三步;若满足迭代终止条件,输出优化结果后结束。
34、与现有技术相比,本发明的有益效果:本发明的风电机组的变桨协调优化控制方法中,基于改进的粒子群寻优算法对变桨pid控制器的三个参数进行寻优,基于bp神经网络建立风电机组模型,将优化后的变桨pid控制器与上述风电机组模型进行连接,将变桨pid控制器的寻优参数输入风电机组模型中,然后由风电机组模型对优化后的参数进行验证,并根据满足控制要求的优化参数生成控制指令发送给风力发电机变桨控制器及执行机构,进行风机变桨控制,实现风力发电机的闭环智能变桨控制,使得风力发电机的输出功率能够更加快速平稳的随着外界风速的变化调整至额定功率附近。运行改进的粒子群算法对变桨pid控制器的参数进行整定,与常规的变桨pid控制器参数整定进行对比分析,在风力发电机组输出功率控制方面,当风速超过风机额定风速时,改进粒子群-变桨pid控制相比传统的变桨pid控制,具有更小的超调量,以及更短的调节时间,动态性能更优。
技术特征:
1.一种风电机组的变桨协调优化控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种风电机组的变桨协调优化控制方法,其特征在于,所述风电机组模型选择五输入一输出模型,输入为风速、偏航偏差角、叶尖速比、桨距角和空气密度,输出为风力发电机组输出功率。
3.根据权利要求2所述的一种风电机组的变桨协调优化控制方法,其特征在于,所述风电机组模型中,输入层的节点为5,输出层的节点为1,隐含层的节点为4。
4.根据权利要求1所述的一种风电机组的变桨协调优化控制方法,其特征在于,对所述scada系统历史数据进行零初始值处理;零初始值的处理原则为:
5.根据权利要求4所述的一种风电机组的变桨协调优化控制方法,其特征在于,n的取值为5。
6.根据权利要求4所述的一种风电机组的变桨协调优化控制方法,其特征在于,零初始值处理后的scada系统历史数据中,80%用于模型训练,剩余的20%用于bp神经网络模型的验证。
7.根据权利要求1所述的一种风电机组的变桨协调优化控制方法,其特征在于,在第四步中,所述的改进粒子群寻优算法为带惯性权重的改进型粒子群算法,在寻优过程中,粒子不断更新自己的位置信息xi和速度信息vi,并且在更新过程中根据适应度值来评价解的品质,之后通过跟踪粒子的个体最优值和粒子种群全局最优值,在全局中寻找最优解。
8.根据权利要求7所述的一种风电机组的变桨协调优化控制方法,其特征在于,所述的改进粒子群寻优算法中,首先设置参数运动范围,适应度函数设置为时间乘以绝对误差积分准则,粒子的位置和速度更新公式为:
9.根据权利要求8所述的一种风电机组的变桨协调优化控制方法,其特征在于,所述的改进粒子群寻优算法对变桨pid控制器内的三个控制参数kp、ki、kd进行寻优,改进粒子群寻优逻辑的步骤包括:
技术总结
本发明涉及一种风电机组的变桨协调优化控制方法,包括以下步骤:第一步,获取风电场的SCADA系统历史数据;第二步,基于BP神经网络对历史数据分析,建立风电机组模型;第三步,以现场的实际数据验证模型的准确性;第四步,基于改进粒子群寻优算法,对变桨PID控制器的参数进行寻优;第五步,将所述改进粒子群寻优算法的计算结果,带入到所述风电机组模型中,由风电机组模型对优化后的参数进行验证,并根据满足控制要求的优化参数生成控制指令,发送给风力发电机变桨控制器及执行机构,进行风机变桨控制,实现风力发电机组的闭环智能变桨控制。本发明使得风力发电机的输出功率能够更加快速平稳的随着外界风速的变化调整至额定功率附近。
技术研发人员:戴媛媛,龙志强,赵波波,马元元,乔耀斌,王伟,刘军军
受保护的技术使用者:山西华仁通电力科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!