基于激光雷达风电机组净空控制方法、装置、系统及介质与流程
本技术涉及风力发电的,尤其是涉及一种基于激光雷达风电机组净空控制方法、装置、系统及介质。
背景技术:
1、近年来,为了适应时代发展,新能源发电不断发展,目前已经是大部分区域的供电手段,其中,风力发电具备不产生任何污染的天然绿色属性,成为了最具潜力的发电形式之一。
2、由于风力发电不断发展,大型风力发电机组功率等级越来越大,相应的叶轮直径也越来越大,叶片也越来越柔,在大风时叶片的变形量就越来越大,叶片净空指风电机组叶轮转动时叶片扫过塔筒时,叶尖部位距离塔筒的最小几何距离,极限工况下,若叶片净空小于零,即出现叶片扫塔。出现叶片即将打到塔筒的情况时,提高桨角是防止净空过小(即增加叶尖与塔筒的距离)的有效手段。
3、传统的风力发电机组反馈控制器在阵风、极限风剪切和极限湍流等极限风况来临时,风电机组无法及时变桨,这使得叶片有扫塔危险,发生扫塔后轻则叶片破裂,重则机组倒塌,目前,已公开的技术为通过净空雷达测量风电机组净空,当检测到风电机组的净空值小于阈值时,控制风电机组停止运行,属于被动控制,同时由于采用被动控制的方式控制净空,对叶片保护效果有限,导致还是经常出现叶片与塔筒发生碰撞,产生损失。
技术实现思路
1、为了减少叶片与塔筒发生碰撞的可能性,减少损失,保证风电机组稳定运行,本技术提供一种基于激光雷达风电机组净空控制方法、装置、系统及介质。
2、第一方面,本技术提供一种基于激光雷达风电机组净空控制方法,采用如下的技术方案:
3、一种基于激光雷达的风电机组净空控制方法,包括:
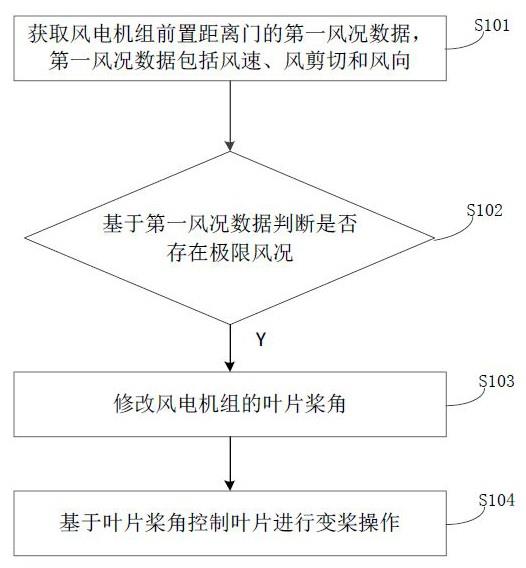
4、获取所述风电机组前置距离门的第一风况数据,所述第一风况数据包括风速、风剪切和风向;
5、基于所述第一风况数据判断是否存在极限风况,所述极限风况包括极限阵风、极限湍流和极限风剪切;
6、若存在极限风况,则修改所述风电机组的叶片桨角;
7、基于所述叶片桨角控制所述叶片进行提前变桨操作。
8、通过采用上述技术方案,在风电机组运行的过程中,通过激光雷达获取风电机组前置距离门的第一风况数据,能够在极限风况到达风电机组叶片之前,使风电机组提前规避极端工况,提高叶片和塔筒之间的净空值,保证风电机组有足够的安全余量应对极限风况,减少叶片扫塔或叶片打到塔筒的情况,增加风电机组运行的安全性,保证风电机组稳定运行。
9、可选的,在所述获取所述风电机组前置距离门的第一风况数据之前,所述方法包括:
10、获取所述当前风电机组的基础参数,所述基础参数包括所述当前风电机组的叶片长度、叶轮转速和塔筒高度;
11、基于所述基础参数确定所述激光雷达的偏转角度;
12、根据所述偏转角度确定所述激光雷达每个激光光束的发射角度;
13、基于每个所述激光光束的发射角度设置多个前置距离门,所述前置距离门为所述激光雷达前置水平距离内的垂直平面。
14、可选的,所述获取所述风电机组前置距离门的第一风况数据包括:
15、获取所有所述前置距离门的第二风况数据;
16、基于当前风电机组的基础参数确定最佳前置距离门;
17、基于所述最佳前置距离门对所述第二风况数据进行筛选,得到第三风况数据;
18、将所述第三风况数据作为第一风况数据,并按照预设周期不断获取第一风况数据。
19、可选的,所述基于所述第一风况数据判断是否存在极限风况包括:
20、基于所述第一风况数据计算净空影响因子,所述净空影响因子包括雷达阵风、垂直风切变和湍流强度;
21、分别判断所述雷达阵风、所述垂直风切变和所述湍流强度是否大于预设阈值;
22、若存在至少一个净空影响因子大于预设阈值;则判定当前前置距离门存在极限风况。
23、可选的,所述基于所述第一风况数据计算净空影响因子包括:
24、获取激光雷达的安装高度以及轮毂高度;
25、基于所述第一风况数据获取所述当前前置距离门的上平面风速和下平面风速;
26、基于所述上平面风速、下平面风速、激光雷达的安装高度以及轮毂高度计算所述当前前置距离门的第一反演风速;
27、基于所述当前前置距离门的第一反演风速获取相邻预设前置距离门的第二反演风速;
28、基于所述上平面风速、下平面风速、激光雷达的安装高度以及轮毂高度计算所述垂直风切变;
29、基于所述第一反演风速、所述第二反演风速和所述垂直风切变计算所述雷达阵风;和/或,
30、获取当前前置距离门的速度平滑周期和第一视向风速;
31、基于所述速度平滑周期和所述第一视向风速确定第二视向风速,所述第二视向风速为所述第一视向风速在所述速度平滑周期的第二视向风速;
32、基于所述第一视向风速和所述第二视向风速确定视向风速变化值;
33、基于所述视向风速变化值和所述第二视向风速计算所述湍流强度。
34、可选的,所述修改所述风电机组的叶片桨角包括:
35、获取所述风电机组的当前叶片桨角和基础参数;
36、基于所述第一风况数据和所述基础参数确定修改叶片桨角;
37、获取前置距离门与所述风电机组的叶片的前置距离;
38、基于所述第一风况数据和所述前置距离确定极限风况到达所述叶片的到达时间;
39、基于所述修改叶片桨角和所述到达时间对所述当前叶片桨角进行修改,得到最小安全叶片桨角。
40、可选的,在所述基于所述叶片桨角控制所述叶片进行提前变桨操作之后,所述方法还包括:
41、基于所述第一风况数据和所述修改叶片桨角建立风况变角数据库;
42、获取所述变桨操作之后所述风电机组的变桨结果,所述变桨结果包括所述风电机组没有损伤和所述风电机组受到损伤;
43、当所述变桨结果为所述风电机组所有损伤时,获取所述变桨结果为所述风电机组没有损伤对应的第一风况数据和所述叶片桨角;
44、将所述变桨结果为所述风电机组没有损伤对应的第一风况数据和所述叶片桨角存储至风况变角数据库内;
45、当所述变桨结果为所述风电机组受到损伤时,基于所述第一风况数据和所述修改叶片桨角建立仿真模型;
46、在所述仿真模型内重新确定修改叶片桨角,得到最新修改叶片桨角;
47、基于所述最新修改叶片桨角在所述仿真模型进行仿真,得到仿真结果;
48、当所述仿真结果为所述风电机组没有损伤时,将所述第一风况数据和对应的最新修改叶片桨角存储至风况变角数据库内。
49、第二方面,本技术提供一种基于激光雷达风电机组净空控制装置,采用如下的技术方案:
50、一种基于激光雷达风电机组净空控制装置,包括:
51、获取模块,用于获取所述风电机组前置距离门的第一风况数据,所述第一风况数据包括风速、风剪切和风向;
52、判断模块,用于基于所述第一风况数据判断是否存在极限风况,所述极限风况包括极限阵风、极限湍流和极限风剪切;若存在极限风况,则修改所述风电机组的叶片桨角;
53、变桨模块,用于基于所述叶片桨角控制所述叶片进行变桨操作。
54、通过采用上述技术方案,在风电机组运行的过程中,通过激光雷达获取风电机组前置距离门的第一风况数据,能够在极限风况到达风电机组叶片之前,使风电机组提前规避极端工况,提高叶片和塔筒之间的净空值,保证风电机组有足够的安全余量应对极限风况,减少叶片扫塔或叶片打到塔筒的情况,增加风电机组运行的安全性,保证风电机组稳定运行。
55、第三方面,本技术提供一种基于激光雷达风电机组净空控制系统,采用如下的技术方案:
56、一种基于激光雷达风电机组净空控制系统,包括雷达测风模块、前馈控制器、最小桨角限制模块、风电机组和反馈控制器;
57、所述雷达测风模块用于检测所述风电机组前置距离门的第一风况数据,并将所述第一风况数据传输至所述前馈控制器;
58、所述前馈控制器用于接收所述第一风况数据,并执行如第一方面所述的方法;
59、所述最小桨角限制模块用于限制所述叶片桨角的最小桨角;
60、所述风电机组用于执行变桨操作、风速测量以及叶片转速测量;并将所述叶片转速传输至所述反馈控制器;
61、所述反馈控制器用于接收所述叶片转速,并根据所述叶片转速实现闭环控制变桨操作。
62、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
63、一种计算机可读存储介质,存储有能够被处理器加载并执行第一方面任一项所述的基于激光雷达风电机组净空控制方法的计算机程序。
- 还没有人留言评论。精彩留言会获得点赞!