一种压气机转速快速跟随的微型涡轴发动机控制方法与流程
本发明涉及涡轴发动机控制,具体是一种压气机转速快速跟随的微型涡轴发动机控制方法。
背景技术:
1、微型涡轴发动机具有耗油率低、单台功率大等特点,适合装配于无人的运输机及其改型飞机,这种发动机具有两个独立的可以调节的控制变量,即燃油流量和螺旋桨的桨距角。通过改变桨距角使得在不同的飞行条件下保持螺旋桨转速恒定在不同转速上,从而使得螺旋桨效率最高,目前涡桨发动机和涡轴发动机都是使用机械液压式的控制系统,并且螺旋桨和发动机的控制是分开的,通过油门和变矩杆两个手杆实现功率和扭矩调节。而微型涡轴发动机的特点是压气机和动力涡轮转速高,压气机转速接近十万转,在扰动情况下,要求所述压气机转速响应快速,而传统发动机使用的变pi控制器,虽然具有结构简单,容易实现,但所述变pi控制器存在对于负载变化的适应能力差和动态响应差的缺点,若为单一提高动态响应,容易出现超调和振荡的问题。以此,传统发动机使用的变pi控制器不能满足所述微型涡轴发动机在扰动情况下大范围内转速的快速变化。
技术实现思路
1、本发明的目的在于克服现有技术中,传统发动机使用的变pi控制器无法在扰动情况下满足微型涡轴发动机中压气机转速快速响应控制的不足,提供了一种压气机转速快速跟随的微型涡轴发动机控制方法。
2、本发明的目的主要通过以下技术方案实现:
3、一种压气机转速快速跟随的微型涡轴发动机控制方法,包括:
4、采用标志位对所述发动机状态迁移,切换所述发动机状态;
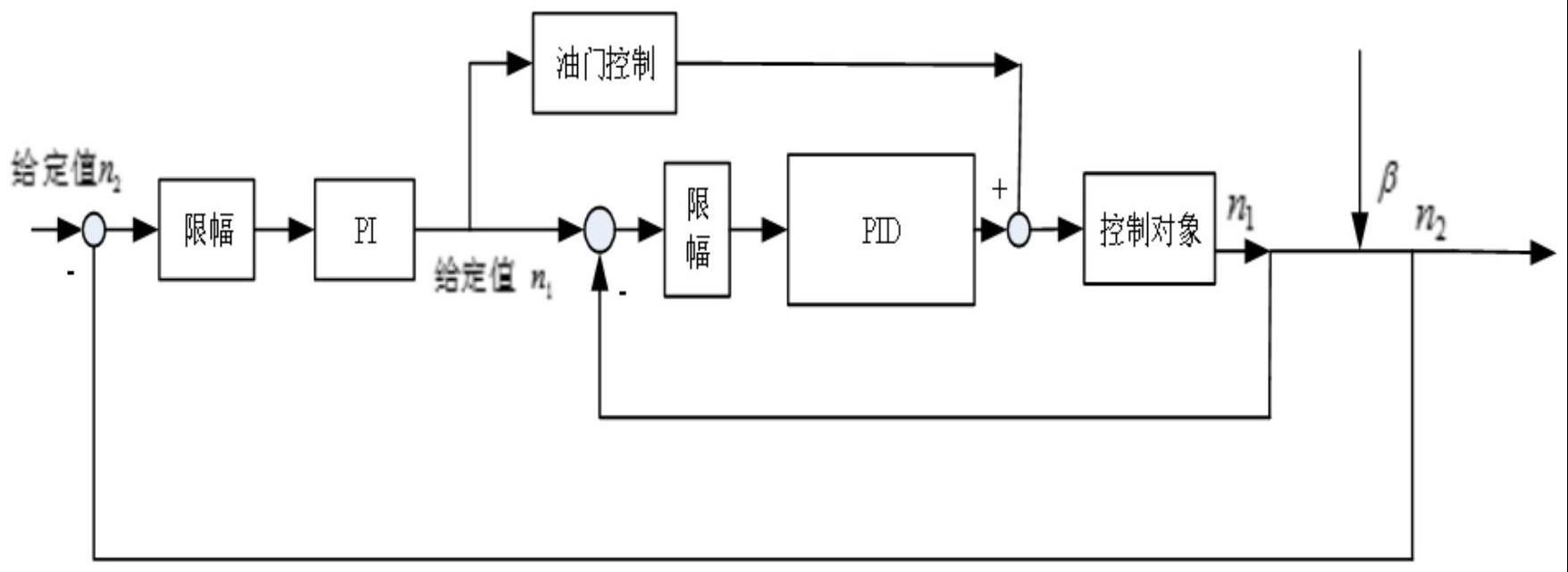
5、所述发动机稳态调节状态不稳定时,控制器通过设有自适应带前馈绝对位置式pid的内环和增量式pi的外环稳定控制变扰动下的动力涡轮转速。
6、目前,微型涡轴发动机的调节方式主要包括燃油流量的调节和螺旋桨的桨距角两种调节方式。由于微型涡轴发动机中的压气机和动力涡轮转速高,为了提高所述微型涡轴发动机工作的效率和稳定性,所述微型涡轴发动机在短时间内进行大范围的转速变化时需要满足快速、稳定的转速变化,同时,所述微型涡轴发动机的转速变化还需具备一定的抗扰动能力。而传统发动机的变pi控制由于短时间内转速大范围变化过程中,在所述变pi控制器输出到达饱和限幅,同时转速达到给定转速时,转速调节器开始退饱和,虽然所述p不再发挥作用,但因为所述变pi控制器具有积分作用,导致所述转速会持续升高,从而超调现象发生;此外,由于所述变pi控制器中p和i对误差均为事后消除;而在误差产生后的消除,对于所述微型涡轴发动机而言,所述变pi控制器无法满足在扰动情况下恢复稳态速度快的要求。
7、在本技术实施例中,所述微型涡轴发动机通过控制器实现各状态间的切换,为了更全面地对所述微型涡轴发动机的状态进行覆盖,避免所述控制器在工作过程中由于状态遗漏造成控制器问题出现时无法迅速排查、处理问题的缺点,所述微型涡轴发动机控制方法采用标志位进行状态迁移,实现发动机在起动、慢车、进定速、稳态、退定速、停车、异常状态控制等多状态间的切换。在采用标志法对所述涡轴发动机的状态进行切换时,为了提高所述控制器在变扰动下的动力涡轮转速稳定控制,所述控制器采用内外环控制结构:所述内外环控制结构中的内环采用自适应带前馈绝对位置式pid控制,外环采用增量式的pi控制;如此,在本技术实施例中,比例环节可以对偏差瞬间作出反应,偏差一旦产生控制器立即产生控制作用,是控制量向减少偏差的方向变化;积分部分则起到消除偏差的作用,同时减少静态误差;此外,在尽可能减少静态误差的同时,为了提高所述控制器的内外环控制调节速度,可加入微分环节,但由于所述微分环节容易导致控制输出的大幅度变化,所述控制器的内环和外环分别采用pid控制和pi控制共同作用以实现变扰动下的所述动力涡轮转速的控制。以此,所述控制器可通过所述控制器的内外环控制达到所述压气机转速快速跟随的目的。
8、进一步的,所述控制器对变扰动下的所述动力涡轮的稳定包括:
9、所述控制器通过设有的自适应带前馈绝对位置式pid的内环控制所述压气机转速快速响应;
10、所述控制器通过设有的增量式pi的外环控制所述动力涡轮转速稳态。
11、在本技术实施例中,所述微型涡轴发动机为动力涡轮式微型涡轴发动机,所述控制器通过设有自适应带前馈绝对位置式pid的内环对所述压气机转速快速响应进行控制;以此,由于所述控制方法具有良好的过程模型,即所述控制器前馈所基于的命令信号总是可获得的,所述控制器的内环中控制量=前馈+pid,所述控制器响应速度提高,减小反馈控制压力;由于所述控制器对变扰动下的所述动力涡轮进行稳定,所述控制器的内环采用位置式pid以当前系统的实际位置,与期望达到的预期位置的偏差进行pid控制;而自适应pid控制具备自动辨识被控过程参数、自动整定控制器参数以及能够适应被控过程参数的变化的优点,以适应不同飞行环境条件下发动机的内环控制的可靠性。所述控制器的外环采用增量式pi,pi控制器可以使系统在进入稳态后无稳态误差,增加了系统的抗干扰能力,且增量式pi的增量式算法不需要进行累加,控制器增量的确定仅与最近几次偏差采样值有关,计算误差对控制量计算的影响较小;
12、进一步的,所述控制器通过设有的所述自适应带前馈绝对位置式pid的内环控制所述压气机转速快速响应包括:
13、所述内环接收飞控发送的飞行高度和飞行马赫数;
14、所述内环根据所述飞行高度计算环境静温;并根据所述飞行马赫数计算环境总压;
15、所述内环将所述环境总压的比值作为第一修正系数;
16、所述内环获取前馈量函数,根据第一修正系数对所述前馈量函数进行修正,获取不同飞行条件下的油门位置;
17、所述内环根据压气机转速计算第二修正系数,确认阈值后,根据所述第一修正系数和第二修正系数修正各状态下的所述pid参数。
18、在本技术实施例中,为了提高所述控制器中所述内环控制的可靠性,所述内环根据所述发动机各项系数实时计算所述第一修正参数和第二修正系数,根据所述第一修正系数以及第二修正系数对前馈量函数和pid参数进行修正,以此实现所述控制器在变扰动下对所述动力涡轮转速的控制。
19、进一步的,所述前馈量函数的获取包括:
20、进行地面台架试验,在慢车的基础上通过手动开车模式,以预设的转速增量增加至最大转速状态;
21、记录上述过程中转速和油泵占空比输出值的数值作为待拟合数值;
22、根据二阶拟合公式中对所述待拟合数值进行拟合,生成前馈量函数;所述前馈量函数为油泵占空比与转速之间关系的分段函数。
23、在本技术实施例中,所述控制器在对所述发动机的控制过程中,由于发动机各种工况下对转速和油泵占空比输出值的数值均不同,为了更好的获取前馈量函数;在本技术实施例中,在通过地面台架模型以预设的转速增量从慢车状态增加转速达到最大转速状态的过程中,记录转速和油泵占空比数值的数据,为了得到更加精准的函数模型,所述记录数据通过二阶拟合公式进行拟合。
24、进一步的,所述前馈量函数的修正包括:
25、获取前馈量函数:pwm0=(a2*n2+a1*n+a0);
26、根据下式修改所述前馈量函数:
27、pwm1=a*(a2*n2+a1*n+a0);
28、式中,pwm0为修正前的前馈量函数,pwm1为修正后的前馈量函数,n为压气机转速,a0、a1和a2均为多项式系数,a为第一修正系数。
29、在本技术实施例中,所述前馈量以二阶拟合公式pwm0=(a2*n2+a1*n+a0)获取更加精确的函数模型,由于所述地面台架模型与所述微型涡轴发动机所处环境等因素的不同,对所述前馈量函数还需通过第一修正系数a进行修正。
30、进一步的,所述第一修正系数根据下式计算:
31、p=101325*(1-h/44.30)5.2553;
32、pt=p*(1+0.5*(k-1)*ma2)k/(k-1);
33、a=pt1/pt0;
34、式中,p为环境静温,h为飞行高度,ma为飞行马赫数,pt为环境总压,a为第一修正系数,k为压缩参数,pt0为标况环境总压且取101kpa。
35、在本技术实施例中,所述控制器通过接收飞控实时发送的海拔高度和飞行马赫数,计算环境静温与环境总压实现对所述第一修正系数的计算;以此,在本技术实施例中,所述第一修正系数计算式子中所述压缩参数k取1.4,所述第一修正系数可通过不断更新的海拔高度和飞行马赫数的数据进行修改,提高了所述第一修正系数对所述前馈量函数和pid参数修正的可靠性。
36、进一步的,所述第二修正系数根据下式计算:
37、b=n/88000+0.16-b1;
38、式中,b为第二修正系数,b1为上一轮计算的b值,n为压气机转速。
39、在本技术实施例中,为了所述第二修正系数对所述pid参数的修正作用,能够实现提高所述控制器控制工作的可靠性,所述第二修正系数通过b=n/88000+0.16-b1进行计算,式中所述b为第二修正系数,b1为上一轮计算的b值,n为压气机转速。
40、进一步的,所述pid参数的修正包括:
41、根据所述压气机转速获取第二修正系数,确认阈值,对比所述第二修正系数与所述阈值;
42、当所述第二修正系数小于所述阈值时,p值和d值为预设的固定值,i值根据所述第一修正系数和所述第二修正系数获取计算参数;
43、当所述第二修正系数大于等于所述阈值时,所述p值和所述d值均根据所述第二修正系数获取计算参数,i值根据第一修正系数和第二修正系数获取计算参数。
44、在本技术实施例中,为了提高所述第二修正系数对所述pid参数修正的准确性,按照所述第二修正系数的计算,确认阈值,并根据阈值与所述第二修正系数的比较关系,对不同情况下的pid参数进行不同的修正;当所述第二修正系数大于所述等于所述阈值时,所述p值和所述d值均根据第二修正系数获取计算参数,i值根据第一修正系数和第二修正系数获取计算参数;当所述第二修正系数小于所述阈值时,p值和d值取预设的固定值,i值根据所述第一修正系数和第二修正系数获取计算参数。
45、进一步的,所述发动机根据标志位进行状态切换的状态包括:0-空闲状态、5-起动状态、6-慢车状态、7-进定速状态、8-稳态调节状态、9-退定速状态、10-停车冷却状态和11-异常处理状态。
46、在本技术实施例中,对所述发动机各状态进行确认,再对所述发动机的状态进行标志,以此,所述控制器对所述发动机在控制过程中,能更好的确认所述发动机的状态并进行控制工作。
47、进一步的,采用标志位对所述发动机状态迁移,切换所述发动机状态的步骤包括:
48、对所述发动机进行上电自检,当所述控制器在上电自检完成后所述发动机进入0-空闲状态;
49、当所述发动机处于0-空闲状态且所述控制机接收到起动信号后,所述控制器按预设的起动控制流程进行起动,起动成功时所述发动机进入5-起动状态;起动失败时所述发动机进入11-异常处理状态;
50、所述控制器起动完成后所述发动机进入6-慢车状态;
51、当所述发动机处于6-慢车状态时,所述控制器通过设有的所述自适应带前馈绝对位置式pid的内环对所述发动机的6-慢车状态进行稳态控制,当所述发动机的所述6-慢车状态实现稳态控制且所述控制器接收到定速信号后,所述发动机进入7-进定速状态,所述发动机的转速根据预设增速量的压气机重新设定;
52、当所述发动机的转速与所述动力涡轮转速差值达到预设差值时,所述发动机进入8-稳态调节状态并通过扭矩杆的扭矩对所述发动机功率进行调节;
53、所述发动机处于8-稳态调节状态并通过所述扭矩杆调节时,所述控制器接收到退定速信号后,所述发动机进入9-退定速状态;
54、当所述发动机处于9-退定速状态时,所述发动机的转速根据预设减速量的压气机重新设定;
55、当所述发动机的转速与所述压气机转速达到预设差值时,所述发动机进入6-慢车状态;
56、所述发动机处于6-慢车状态且所述控制器接收停车信号后,所述发动机进入10-停车冷却状态,所述控制器按预设的停车冷却流程执行冷吹操作;
57、当所述发动机在各状态间的迁移失败时,所述发动机进入11-异常处理状态。
58、在本技术实施例中,所述发动机状态迁移采用标志位,当所述控制器在不同状态下收到命令信号后,按照所述命令信号与所述发动机的状态进行下一步操作,以此,所述发动机状态流程的切换工作得以简化,当所述发动机各状态出现问题时,也能实现快速排查问题的目的。
59、综上所述,本发明与现有技术相比具有以下有益效果:在本技术中,所述控制方法中所述控制器通过设有的内外环控制结构,可使所述控制器通过设有的自适应带前馈绝对位置式pid的内环控制所述压气机转速快速响应,所述控制器通过设有的增量式pi的外环控制所述动力涡轮转速稳态;以此,所述控制器得以实现变扰动下的动力涡轮转速的控制,解决了微型涡轴发动机压气机和动力涡轮由于转速较高,在变扰动情况下动态响应差,不能快速跟随目的转速,若为单一提高响应易出现超调和振荡的缺点。
- 还没有人留言评论。精彩留言会获得点赞!