一种主轴相位采集方法与流程
本发明涉及水电机组设施设备,具体涉及一种主轴相位采集方法,本发明是发明名称为一种用于水轮发电机组轴系状态特征参数获取的系统及方法,申请号为202111146420.7的发明专利的分案申请。
背景技术:
1、在传统的获取水轮发电机组轴系调整方案中,是通过盘车数据计算出主轴轴系的当前状态。操作人员通过分析主轴轴系状态的计算结果,凭人为经验初步确定一个轴系调整方案,并将此调整方案代入计算公式,试算出按此调整方案调整后主轴轴系状态的结果。若结果可接受,既按此调整方案进行轴系调整。若结果不可接受,再更换调整方案进行试算,直至结果可接受为止。一般来说,针对水电机组传统的盘车轴系调整方法,不仅盘车周期长、人工测量和计算工作量大,且定点盘车测点数少导致计算精度不高。除此之外,最大的弊病在于,轴系调整方案的给出完全依赖人的经验,经过多次试算才能确定一个可接受的但并非最佳的调整方案。
2、鉴于此,申请人提出一种用于水轮发电机组轴系状态特征参数获取的系统及一种主轴相位采集方法。
技术实现思路
1、本发明的目的是为了实现水轮发电机组轴系状态调整过程中的自动采集数据、自动计算分析,并为最终自动给出轴系调整方案提供可靠的依据,而提供的一种用于水轮发电机组轴系状态特征参数获取的系统及方法及主轴相位采集方法。
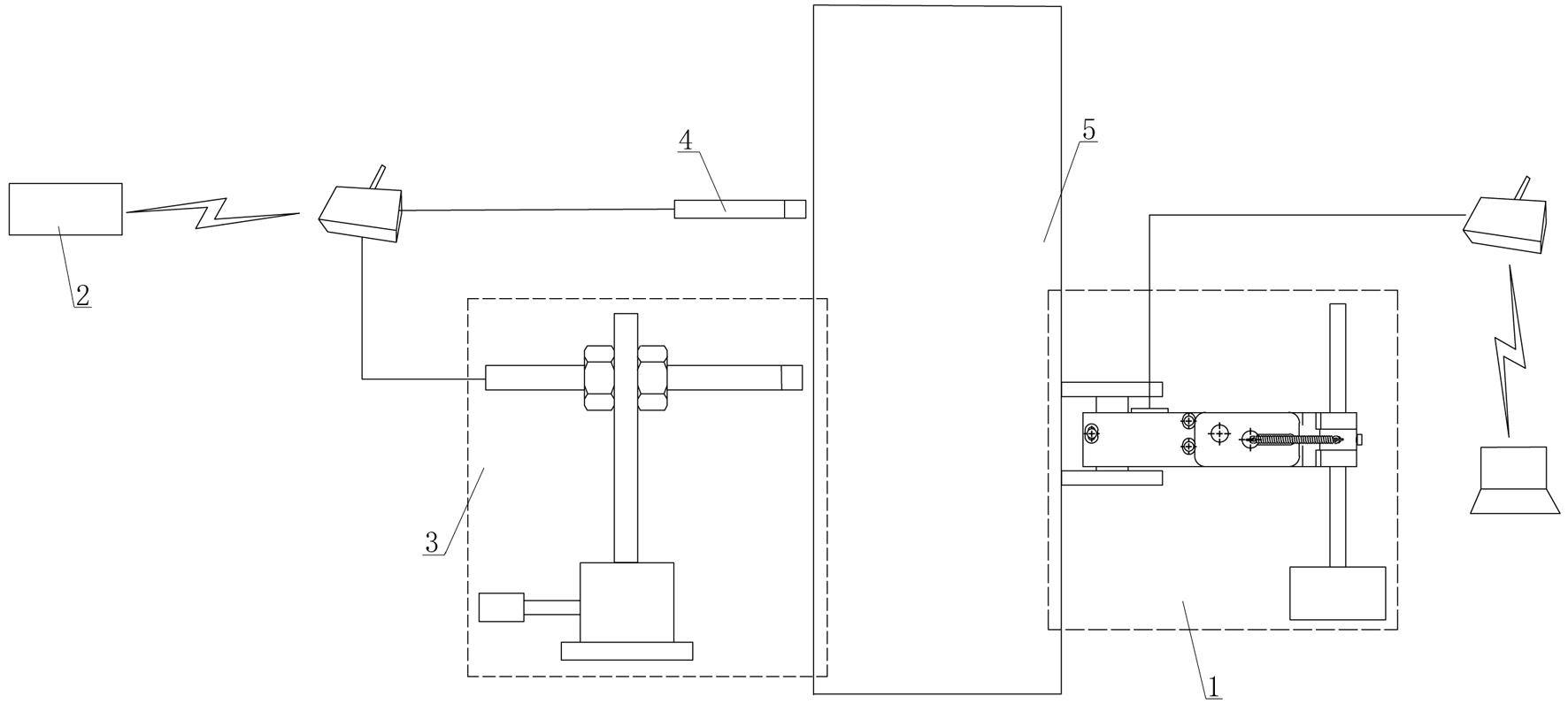
2、一种用于水轮发电机组轴系状态特征参数获取的系统,它包括相位采集装置、镜板水平测量装置、摆度传感器;
3、相位采集装置设置于主轴处,用于盘车时对主轴相位进行采集;
4、镜板水平测量装置设置于旋转部件水平面上,用于盘车时对机组镜板水平度进行自动连续测量;
5、摆度传感器用于测量与主轴之间的间隙值;传感器原位标定装置用于对电涡流传感器的灵敏度系数进行现场原位在线标定。
6、上述相位采集装置包括支柱、以及与支柱底端连接的底座,转臂套设在支柱上,转臂包括套设于支柱上的上侧转臂、下侧转臂,上侧转臂与下侧转臂之间设有限位块,限位块套设在支柱上,限位块通过顶丝与支柱连接,连接板的一端与转臂通过紧固螺钉连接,并可通过连接板设置的直滑槽来调节相对位置;连接板的另一端与固定板通过紧固螺钉连接;旋转编码器通过固定板上的紧固螺钉固定。
7、在紧固螺钉背部设置有挂钩,与限位块通过弹簧连接,用来给转臂的旋转施加预紧力;在固定板与连接板连接的这一端设置有弧形滑槽,可以使固定板在上下、前后及圆周方向进行微调。
8、上述镜板水平测量装置包括水平测量传感器、与水平测量传感器连接的采集模块;
9、在盘车过程中,采用镜板水平测量装置对镜板水平度进行计算时,采用以下方法:
10、在镜板任意方位,将水平测量传感器采集的倾角数据进行x向及y向矢量分解。如镜板角度αi下,采集的倾角数据βαi分解为x方向向量βαix及y方向向量βαiy为:
11、βαix=βαicosαi;αi∈[0,360)
12、βαiy=βαisinαi;αi∈[0,360)
13、机组旋转一周水平传感器所测量平面的倾角x方向向量βx及y向量βx计算方法为:
14、
15、
16、则倾角β及方位角θ计算方法如下:
17、
18、
19、则镜板水平度方位角为θ,水平度h(mm/m)为:
20、h=tgβ×1000;(mm/m)。
21、上述摆度传感器采用电涡流传感器;
22、电涡流传感器的灵敏度系数由传感器原位标定装置进行标定,
23、传感器原位标定装置包括底座,在底座上设有高精度平移平台,竖向设置的立柱在底端与高精度平移平台的上端面连接,在立柱的上端且垂直于立柱设有电涡流传感器。
24、上述立柱平行于主轴,电涡流传感器为条形结构,电涡流传感器的检测端接近主轴。
25、在立柱上端贯穿设置有圆孔,电涡流传感器横向与圆孔配合连接并通过固定螺母固定设置于立柱的上端。
26、高精度平移平台可带动立柱在x向/y向移动。
27、高精度平移平台包括x向调节模块、y向调节模块以及调节旋钮,x向调节模块可通过x向粗调旋钮和x向微调旋钮产生x向精确位移,y向调节模块可通过y向粗调旋钮和y向粗调旋钮产生y向精确位移。
28、在使用原位标定装置对电涡流传感器的灵敏度系数进行标定时,采用以下步骤:
29、1)将原位标定装置固定在传感器的测量部位附近;然后把电涡流传感器固定在原位标定装置上,将被标定的电涡流感器的输出信号接入本层采集装置,并提供传感器电源;
30、2)在上述准备工作完成后,通过高精度平移平台调整电涡流传感器和主轴之间的距离,由信号处理计算机自动并记录被标定传感器输出的电压/电流信号,另外人工读取原位标定装置上的高精度标尺数据,计算电涡流和主轴之间的间隙调整值,并将该数据同步输入到计算机;
31、3)当通过上述步骤测量获得多个位移点的信号和数据之后,由信号处理计算机采用最小二乘法计算获得被标定传感器的待校验灵敏度系数;
32、4)采用所获得的待校验灵敏度系数,调整主轴表面和传感器之间的距离,同时记录电涡流传感器测量的位移输出和人工测量的实际位移,并逐点对比二者之间的误差,形成误差分析报告,如果二者之间的误差在允许的范围之内,则在线标定完成,待校验灵敏度系数就是本系统测量用的电涡流传感器灵敏度系数。
33、一种主轴相位采集方法,在进行主轴相位的采集时,采用以下步骤:
34、1)旋转编码器采用接触式原理,旋转编码器的滚轮与机组主轴直接接触;
35、2)当主轴旋转时,主轴带动旋转编码器的滚轮转动;
36、3)装在滚轮上的转动脉冲传感器,发送出一连串的脉冲,每个脉冲代表着一定的距离值;
37、4)旋转编码器的脉冲信号通过信号电缆送至无线采集单元,转换成0和1的数字量,并通过wifi无线传输至数据处理单元。数据处理单元根据0和1计数,从而就能换算出主轴的旋转相位和线速度。
38、当旋转编码器的滚轮旋转时,滚轮上的转动脉冲传感器发送出一连串的脉冲。每个脉冲代表着滚轮产生指定的位移值。设主轴直径为d(单位:mm),时间t内脉冲计数为n,则该时刻所对应的主轴的旋转角度α计算公式为:
39、
40、滚轮旋转线速度v1为:
41、主轴旋转线速度v2为:
42、一种在盘车过程中对镜板水平度进行计算的方法,它采用以下方法:
43、在镜板任意方位,将水平测量传感器采集的倾角数据进行x向及y向矢量分解。如镜板角度αi下,采集的倾角数据βαi分解为x方向向量βαix及y方向向量βαiy为:
44、βαix=βαicosαi;αi∈[0,360)
45、βαiy=βαisinαi;αi∈[0,360)
46、机组旋转一周水平传感器所测量平面的倾角x方向向量βx及y向量βx计算方法为:
47、
48、
49、则倾角β及方位角θ计算方法如下:
50、
51、
52、则镜板水平度方位角为θ,水平度h(mm/m)为:
53、h=tgβ×1000;(mm/m)。
54、与现有技术相比,本发明具有如下技术效果:
55、1)本发明填补了立式水轮发电机组连续盘车轴线调整技术的空白,首次采用电测法自动采集数据、无线通讯、自动计算分析、自动给出轴线调整方案,解决了传统方法自动化程度低、人工测量/计算误差大的问题,可显著提高机组轴线调整的工作效率和调整精度,缩短检修工期,节省人力物力;
56、2)本发明采用接触式旋转编码器,实现任意盘车方式下主轴相位的高精度连续测量,解决了目前键相测量、光电测量、齿盘测量等传统技术无法进行主轴相位连续测量的难题;
57、3)相比于传统的对于镜板水平的测量方式通常使用合像水平仪测量,测量点少且需要人工读数,存在精度低、读数误差及停止点不准确等情况,本发明中采用的镜板水平度测量技术能实现镜板水平度的连续无线采集。
58、4)本发明中采用的传感器原位标定技术能很好的对电涡流传感器的灵敏度系数进行现场标定,有效消除主轴材料和曲率对测量结果的影响。
- 还没有人留言评论。精彩留言会获得点赞!