一种风电场实时协同偏航控制方法
本发明涉及风力发电领域,尤其涉及一种风电场实时协同偏航控制方法。
背景技术:
1、随着社会的发展,风能开发的规模越来越大,在风电场的运行过程中,风机发电控制策略对整个风电场的总发电量有至关重要的影响。风电场的常规控制方式大多以实时对风的贪婪控制策略以实现单台风机的发电量最大,但这种控制策略并未考虑上游风机尾流效应对下游风机的影响,因此未能使整个风电场的发电量达到最大化。
2、协同偏航控制方法通过协调风电场各风机之间的偏航控制,减少尾流效应对下游风机发电的影响,从而实现风电场总发电量的最大化。但对于实际风电场而言,来流风速风向是实时变化的,而目前尚未提出考虑时变风况的风电场实时协同控制方法。由于风电场中风环境的变化始终存在,并显著影响协同偏航控制的性能;传统的人工智能方法需要大量迭代才能达到最优,并且容易陷入局部最优,这导致显著的时间延迟,并对风电场控制优化的效率产生不利影响。
3、因此,急需提出一种高效的风电场实时协同偏航控制方法。
技术实现思路
1、针对现有技术存在的上述不足,本发明的目的在于解决现有技术中风力电场发电量优化差,控制策略延迟高,导致发电效率低,发电量低的问题,提供一种风电场实时协同偏航控制方法,能够根据风电场中风环境变化进行实时优化,提高发电效率,从而获得更大的风电场发电量。
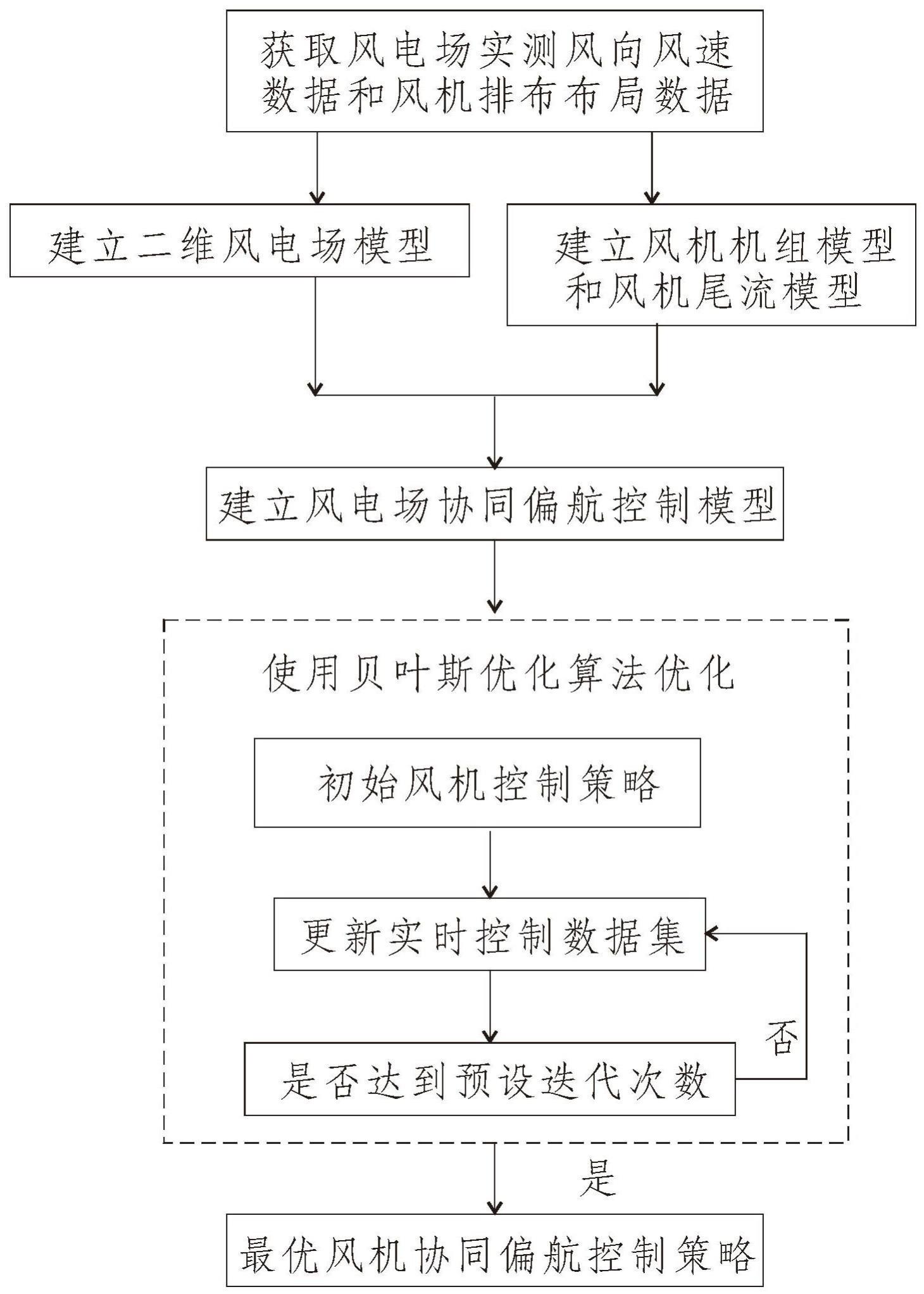
2、为了解决上述技术问题,本发明采用的技术方案为:一种风电场实时协同偏航控制方法,其特征在于,包括如下步骤:
3、1)获取风电场的实测风向风速数据和风机排布布局数据;
4、2)根据风机排布布局数据,建立基于二维坐标的风电场模型,模拟风电场的空间分布;
5、3)建立风机机组模型和风机尾流模型;
6、4)将风电场模型与风机机组模型和风机尾流模型结合,建立风电场协同偏航控制模型;
7、5)根据风电场实时采集的风向风速数据,利用贝叶斯优化算法对各时刻每台风机的偏航角参数进行优化,获得风电场发电量最大时各台风机的偏航角,即最优风机协同偏航控制策略;
8、6)通过偏航控制模型模拟真实风电场的工作情况,对最优风机协同偏航控制策略下的风电场功率效果进行验证。
9、进一步地,所述风机排布布局数据包括风机数量、风机排布方式以及风机之间的排布间距。
10、进一步地,基于风电场模型,对风电场内各个风机的二维坐标进行推算,得到各个风机的空间坐标。
11、进一步地,步骤3)中,所述风机机组模型包括根据选取的风机原型机设定机组转子面半径、偏航转速、轮毂高度和功率曲线,根据风场来流情况设定初始偏航角;
12、所述风机尾流模型包括速度损失模型和湍流度模型,其中,速度损失模型采用基于二维高斯模型的偏航尾流模型,得到偏航状态下风机的尾流速度分布;湍流度模型采用crespo-hernandez尾流湍流模型,用于计算由风机尾流效应引起的风场湍流度分布变化。
13、进一步地,步骤4)中,将风机尾流模型、风机机组模型和风电场模型中风机的空间位置分布相结合,获得风电场模型中各个风机在下游风机处的尾流速度,通过叠加模型计算各个风机受尾流影响下的来流速度;通过建立风电场协同偏航控制模型,获得任意偏航角度下的风电场内各个风机的轮毂处入流风速数据。
14、进一步地,步骤5)中,具体包括如下步骤:
15、a)确定风电场实时协同偏航控制中涉及的相关参数,包括:偏航目标更新的时间步长,偏航目标的偏航动作速度以及偏航目标的偏航动作范围,风电场内每台风机都在偏航动作范围内拥有任意偏航角度,将所有风机的偏航角度整合在一起即为一个风电场的协同偏航控制方案;
16、b)对每台风机随机给定初始偏航角;
17、c)基于功率曲线函数,计算风电场的整体发电功率,建立风电场偏航控制矩阵;
18、d)采用高斯过程回归对功率输出函数f进行建模:
19、
20、式中,k是协方差矩阵,kij=k(xi,xj)对应于第(i,j)个输入且kt=(k(x1,x),...,k(xn,x));噪声方差用于量化功率输出y1:n={y1,...,yn}中的噪声水平;
21、e)使用高斯过程平均函数μ(x|dn)和方差函数σ2(x|dn)选择下一次迭代的风机动作xn+1:
22、xn+1=arg max(μ(x|dn)+ρnσ2(x|dn));
23、式中,参数ρn用于平衡选择函数中搜寻效率与搜寻质量。
24、f)当计算次数达到设定值时,停止迭代;否则,反复计算步骤c)-步骤e),得到最优的风机协同偏航控制策略。
25、进一步地,基于功率曲线计算风电场的整体发电功率过程为:
26、对于给定的风速u和风向θw和风电场机群的偏航角,通过考虑风机之间的尾流相互作用,采用功率曲线进行计算每台风机的发电功率pi,则风电场整体发电功率可以用y来表示:
27、
28、式中,x=(x1,…,xi,…,xn),xi=γi表示目标风机i的偏航动作;pi是第i台风机的功率,可以表示为局部来流vi的函数,其函数曲线由选取的风机原型机决定。
29、与现有技术相比,本发明具有如下优点:本方法针对风电场常规实时追风的控制方法忽视风机尾流效应影响而未能达到整体发电量最优的问题,提出建立风电场协同偏航控制模型,以考虑风电场上游风机尾流对下游风机的影响继而减少风力发电量损失,同时采用贝叶斯优化算法高效求解偏航控制优化问题,以满足实时协同控制的高效率要求,通过实时协同偏航控制方法,能得到比传统控制方法更佳的风电场发电量,有效提供风电场实时运行中的最优风机控制方案,能够根据风电场中风环境变化进行实时优化,提高发电效率,从而获得更大的风电场发电量,使整体风电场发电量达到最大值。
技术特征:
1.一种风电场实时协同偏航控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种风电场实时协同偏航控制方法,其特征在于,所述风机排布布局数据包括风机数量、风机排布方式以及风机之间的排布间距。
3.根据权利要求1或2所述的一种风电场实时协同偏航控制方法,其特征在于,基于风电场模型,对风电场内各个风机的二维坐标进行推算,得到各个风机的空间坐标。
4.根据权利要求1所述的一种风电场实时协同偏航控制方法,其特征在于,步骤3)中,所述风机机组模型包括根据选取的风机原型机设定机组转子面半径、偏航转速、轮毂高度和功率曲线,根据风场来流情况设定初始偏航角;
5.根据权利要求4所述的一种风电场实时协同偏航控制方法,其特征在于:步骤4)中,将风机尾流模型、风机机组模型和风电场模型中风机的空间位置分布相结合,获得风电场模型中各个风机在下游风机处的尾流速度,通过叠加模型计算各个风机受尾流影响下的来流速度;通过建立风电场协同偏航控制模型,获得任意偏航角度下的风电场内各个风机的轮毂处入流风速数据。
6.根据权利要求1所述的一种风电场实时协同偏航控制方法,其特征在于,步骤5)中,具体包括如下步骤:
7.根据权利要求6所述的一种风电场实时协同偏航控制方法,其特征在于,基于功率曲线计算风电场的整体发电功率过程为:
技术总结
本发明公开了一种风电场实时协同偏航控制方法,包括如下步骤:1)获取风电场的实测风向风速数据和风机排布布局数据;2)建立基于二维坐标的风电场模型;3)建立风机机组模型和风机尾流模型;4)建立风电场协同偏航控制模型;5)根据风电场实时采集的风向风速数据,获得最优风机协同偏航控制策略;6)通过偏航控制模型模拟真实风电场的工作情况,对最优风机协同偏航控制策略下的风电场功率效果进行验证。本发明能够根据风电场中风环境变化进行实时优化,提高发电效率,从而获得更大的风电场发电量。
技术研发人员:杨庆山,李天,张扶青,潘杰,李杭,胡伟成
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!