海上风电机组振动超限故障识别方法、装置、设备及介质与流程
本发明涉及电信号处理,具体涉及海上风电机组振动超限故障识别方法、装置、设备及介质。
背景技术:
1、海上风电具有风机发电量高以及适合开发的优势,目前,海上风电进入快速发展期,但由于海上风电机组所处的特殊环境,海上风电机组容易受环境影响而出现各种故障,因此,海上风电的运维和检修工作就显得十分重要。
2、目前,海上风电机组在检测到风机机舱发生振动超限故障,则会控制风机停机,然后由运维人员对实施海上风电运维和检修工作。运维人员在进行运维工作时,一般是基于过往经验对海上风电机组可能存在的故障进行逐一排查,存在浪费人力资源且耗时长的缺陷。
技术实现思路
1、有鉴于此,本发明提供了一种海上风电机组振动超限故障识别方法、装置、设备及介质,以解决现有对海上风电机组故障排场方法存在的浪费人力资源且耗时长的问题。
2、第一方面,本发明提供了一种海上风电机组振动超限故障识别方法,包括:
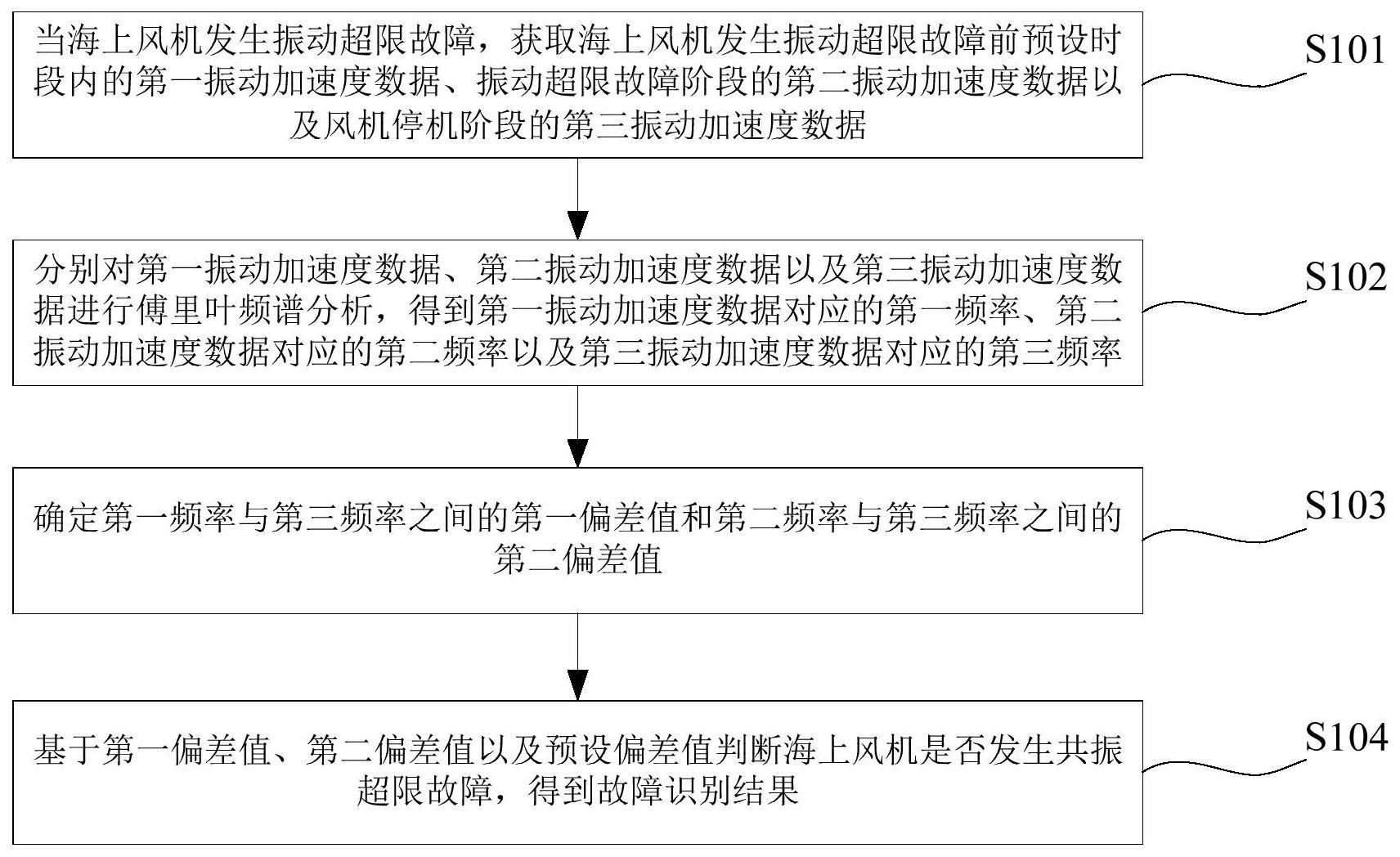
3、当海上风机发生振动超限故障,获取海上风机发生振动超限故障前预设时段内的第一振动加速度数据、振动超限故障阶段的第二振动加速度数据以及风机停机阶段的第三振动加速度数据;分别对第一振动加速度数据、第二振动加速度数据以及第三振动加速度数据进行傅里叶频谱分析,得到第一振动加速度数据对应的第一频率、第二振动加速度数据对应的第二频率以及第三振动加速度数据对应的第三频率,第一频率为海上风机发生振动超限故障前叶轮正常转动阶段风机激励频率,第二频率为海上风机发生振动超限故障风机激励频率,第三频率为海上风机停机阶段的固有频率;确定第一频率与第三频率之间的第一偏差值和第二频率与第三频率之间的第二偏差值;基于第一偏差值、第二偏差值以及预设偏差值判断海上风机是否发生共振超限故障,得到故障识别结果。
4、本发明提供内的海上风电机组振动超限故障识别方法,当海上风机发生共振超限故障时,对海上风机发生振动超限故障前预设时段内的第一振动加速度数据、振动超限故障阶段的第二振动加速度数据以及风机停机阶段的第三振动加速度数据进行傅里叶频谱分析,得到海上风机发生振动超限故障前叶轮正常转动阶段风机激励频率、海上风机发生振动超限故障风机激励频率以及海上风机停机阶段的固有频率,根据叶轮正常转动阶段风机激励频率与固有频率之间的第一偏差值、发生振动超限故障风机激励频率与固有频率之间的第二偏差值以及预设偏差值确定海上风机是否发生共振超限故障,实现了海上风机振动故障的智能化诊断,通过对海上风机的振动加速度数据进行分析就可以确定海上风机发生振动超限故障的原因,解决了相关技术中通过人力排查故障存在的浪费人力资源且耗时长的问题。
5、在一种可选的实施方式中,基于第一偏差值、第二偏差值以及预设偏差值判断海上风机是否发生共振超限故障,得到故障识别结果之后,方法还包括:基于故障识别结果确定故障处理方案。
6、本可选实施方式提供的方法,基于故障识别结果确定故障处理方案,提高了海上风电运维和检修工作的效率,保障风机安全运行。
7、在一种可选的实施方式中,基于第一偏差值、第二偏差值以及预设偏差值判断海上风机是否发生共振超限故障,得到故障识别结果之后,该方法还包括:当海上风机发生共振超限故障,则基于海上风机的叶轮转速范围确定海上风机叶片的扫掠频率带;判断第三频率是否落入扫掠频率带;当第三频率落入扫掠频率带,则基于第三频率确定扫掠频率带对应的共振转速区间;基于共振转速区间以及海上风机发生振动超限故障前叶轮的实测转速确定海上风机是否发生自激共振故障。
8、本可选实施方式提供的方法,基于海上风机的扫掠频率带以及固有频率确定海上风机是否发生自激共振故障,便于后续基于判断结果确定对应的故障解决方案。
9、在一种可能的实施方式中,当海上风机发生振动超限故障,获取海上风机发生振动超限故障前目标时段内的第一振动加速度数据、振动超限故障阶段的第二振动加速度数据以及风机停机阶段的第三振动加速度数据之前,方法还包括:获取海上风机机舱中的振动加速度数据;分别将振动加速度数据与预设阈值进行比对,得到比对结果;基于比对结果判断海上风机是否发生振动超限故障。
10、本可选实施方式提供的方法,将振动加速度数据与预设阈值进行比对,基于比对结果可以准确判断海上风机是否发生振动超限故障。
11、在一种可选的实施方式中,当海上风机发生振动超限故障,获取海上风机发生振动超限故障前目标时段内的第一振动加速度数据、振动超限故障阶段的第二振动加速度数据以及风机停机阶段的第三振动加速度数据之前,该方法还包括:获取第一加速度传感器采集到的振动加速度数据以及第二加速度传感器采集到的振动加速度数据;基于第一加速度传感器采集到的振动加速度数据以及第二加速度传感器采集到的振动加速度数据判断第一加速度传感器和第二加速度传感器的工作状态是否正常;若第一加速度传感器和第二加速度传感器的工作状态正常,根据第一加速度传感器采集到的振动加速度数据以及第二加速度传感器采集到的振动加速度数据判断海上风机是否发生振动超限故障;若判定海上风机发生振动超限故障,向海上风机发送停机控制指令。
12、本可选实施方式提供的方法,可以更加准确地确定海上风机是否发生共振超限故障,有效避免了因为振动传感器的工作状态异常而导致的风机停机问题。
13、在一种可能的实施方式中,根据第一加速度传感器采集到的振动加速度数据以及第二加速度传感器采集到的振动加速度数据判断海上风机是否发生振动超限故障,包括:分别将第一加速度传感器采集到的振动加速度数据以及第二加速度传感器采集到的振动加速度数据与预设阈值进行比对,得到比对结果;若第一加速度传感器采集到的振动加速度数据大于预设阈值,和/或第二加速度传感器采集到的振动加速度数据大于预设阈值,判定海上风机发生振动超限故障。
14、本可选实施方式提供的方法,可以更加准确地确定海上风机是否发生共振超限故障。
15、在一种可能的实施方式中,当海上风机发生振动超限故障,获取海上风机发生振动超限故障前预设时段内的第一振动加速度数据、振动超限故障阶段的第二振动加速度数据以及风机停机阶段的第三振动加速度数据,包括:当海上风机发生振动超限故障,获取海上风机发生振动超限故障前预设时段内的第一初始振动加速度数据、振动超限故障阶段的第二初始振动加速度数据以及风机停机阶段的第三初始振动加速度数据;分别对第一初始振动加速度数据、第二初始振动加速度数据以及第三初始振动加速度数据进行信号补零处理,得到第一初始振动加速度数据对应的第一振动加速度数据、第二初始振动加速度数据对应的第二振动加速度数据以及第三初始振动加速度数据对应的第三振动加速度数据。
16、本实施方式提供的方法,增加了振动加速度数据,缩短了分析频率的间隔,便于后续通过对振动加速度数据进行傅里叶频谱分析获取高精度频谱分析结果。
17、第二方面,本发明提供了一种海上风电机组振动超限故障识别装置,该装置包括:第一获取模块,用于当海上风机发生振动超限故障,获取海上风机发生振动超限故障前预设时段内的第一振动加速度数据、振动超限故障阶段的第二振动加速度数据以及风机停机阶段的第三振动加速度数据;频谱分析模块,用于分别对第一振动加速度数据、第二振动加速度数据以及第三振动加速度数据进行傅里叶频谱分析,得到第一振动加速度数据对应的第一频率、第二振动加速度数据对应的第二频率以及第三振动加速度数据对应的第三频率,第一频率为海上风机发生振动超限故障前叶轮正常转动阶段风机激励频率,第二频率为海上风机发生振动超限故障风机激励频率,第三频率为海上风机停机阶段的固有频率;第一确定模块,用于确定第一频率与第三频率之间的第一偏差值和第二频率与第三频率之间的第二偏差值;第二确定模块,用于基于第一偏差值、第二偏差值以及预设偏差值判断海上风机是否发生共振超限故障,得到故障识别结果。
18、在一种可能的实施方式中,该装置还包括:第三确定模块,用于基于故障识别结果确定故障处理方案。
19、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的海上风电机组振动超限故障识别方法。
20、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的海上风电机组振动超限故障识别方法。
- 还没有人留言评论。精彩留言会获得点赞!