用于复杂山区风力发电设施远程智能维护系统的制作方法
本发明属于山区风力发电设施,具体涉及一种用于复杂山区风力发电设施远程智能维护系统。
背景技术:
1、风能(wind energy)空气流动所产生的动能。太阳能的一种转化形式。由于太阳辐射造成地球表面各部分受热不均匀,引起大气层中压力分布不平衡,在水平载荷梯度的作用下,空气沿水平方向运动形成风。风能资源的总储量非常巨大,一年中技术可开发的能量约5.3x10^13千瓦时。风能是可再生的清洁能源,储量大、分布广。
2、而运用风能的在山区复杂环境下的风电机组的叶片位于环境恶劣高空,严寒酷暑、雷电、冰冻、雨雪等随时都会对叶片产生危害,所以在专利号为“cn202022482906.5”的现有技术方案中,就给出了一种风机叶片在线监测装置,其具有载荷变送器用来侦测叶片的载荷量,在山区的风电机组的叶片工作期间,发生载荷不合理时,载荷变送器传递消息到提示单元,提示单元传出提示消息;该方式受制于仅仅在山区的风电机组的叶片工作期间,发生不小的载荷不合理时,方可传出提示消息,且未有对山区的风电机组的叶片工作期间的载荷执行解析,也无法依据山区的风电机组的叶片在长时间运用时,载荷的细小波动来取得山区的风电机组的叶片具有的性能缺陷风险。
技术实现思路
1、为解决现有技术中具有的不足,本发明提出一种用于复杂山区风力发电设施远程智能维护系统,起始取得山区的风电机组的叶片上的载荷变送器传来的以前侦测载荷量与现时侦测载荷量,取得以前侦测载荷量的变动量队列,依据各次以前侦测载荷量的变动量队列回归目的变动量队列,依据目的变动量队列内的各个目的量相应的变动量、各个目的变动量取得目的变动量队列内的全部切分位置,该阶段对各次以前侦测载荷量执行了处置,因为各次以前侦测载荷量面对独个的载荷量来说,更带有典型性,防止了因为排风起始阶段载荷波动不显著形成的偏差,所以,依据各次以前侦测载荷量的变动量队列取得切分位置,让之后的分节更正确;依据全部切分位置对目的变动量队列执行分节,取得各个毗邻的2节目的变动量队列相应的变动量队列的相近量,依据相近量确认各个毗邻的2节目的变动量队列是不是要组合,且取得若干目的量节,依据各个目的量节相应的各个变动量与现时侦测载荷量的变动量的相近量均数、全部变动量的均数与现时侦测载荷量的变动量,取得相应目的量节的关键度;该阶段起始运用切分位置对目的变动量队列执行初步切分,取得了若干的目的变动量队列,因为分节期间仅依据了目的变动量队列内各个变动量相应的变动量与各个目的变动量,所以分节后会带有一些偏差,于是依据各个毗邻的2节目的变动量队列相应的变动量队列的相近量,接着执行分节,取得了最终的目的量节,让分节后带来更精准的功能,宜于之后运算各个目的量节的关键度,确认现时运用山区的风电机组的叶片是不是带有不合理,所以,该阶段达成了依据各次以前侦测载荷量对现时运用山区的风电机组的叶片执行确认,由各次以前侦测载荷量的细小波动内,对现时运用山区的风电机组的叶片执行侦测,确认该山区的风电机组的叶片是不是带有工作不合理的风险。
2、本发明运用如下的技术方案。
3、一种用于复杂山区风力发电设施远程智能维护方法,包括:
4、载荷变送器收集山区的风电机组的叶片工作期间形成的载荷量且传至远程上位机中执行解析;
5、执行解析的方法包含:
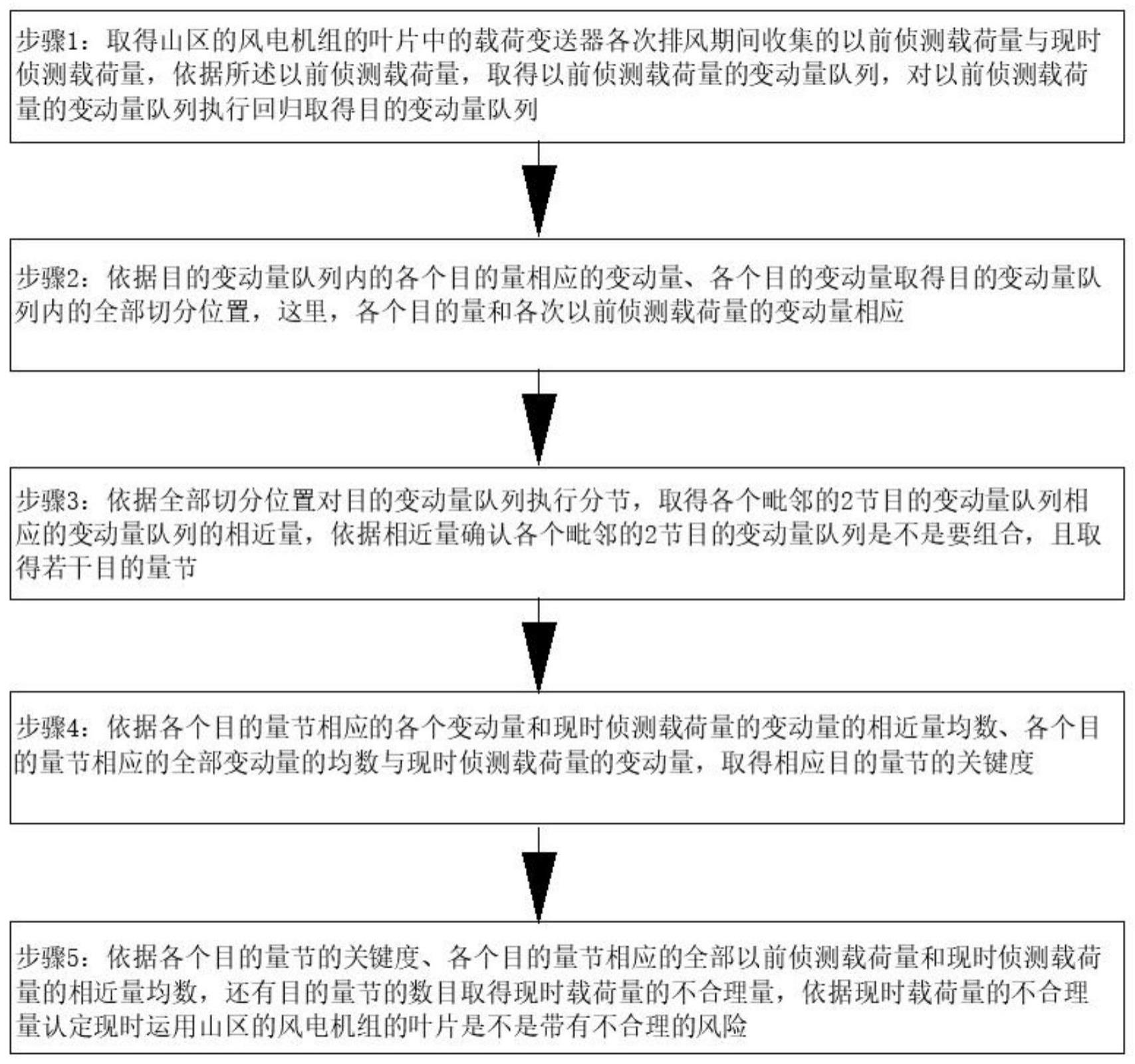
6、步骤1:取得山区的风电机组的叶片上的载荷变送器各次排风期间收集的以前侦测载荷量与现时侦测载荷量,依据所述以前侦测载荷量,取得以前侦测载荷量的变动量队列,对以前侦测载荷量的变动量队列执行回归取得目的变动量队列;
7、步骤2:依据目的变动量队列内的各个目的量相应的变动量、各个目的变动量取得目的变动量队列内的全部切分位置,这里,各个目的量和各次以前侦测载荷量的变动量相应;
8、步骤3:依据全部切分位置对目的变动量队列执行分节,取得各个毗邻的2节目的变动量队列相应的变动量队列的相近量,依据相近量确认各个毗邻的2节目的变动量队列是不是要组合,且取得若干目的量节;
9、步骤4:依据各个目的量节相应的各个变动量和现时侦测载荷量的变动量的相近量均数、各个目的量节相应的全部变动量的均数与现时侦测载荷量的变动量,取得相应目的量节的关键度;
10、步骤5:依据各个目的量节的关键度、各个目的量节相应的全部以前侦测载荷量和现时侦测载荷量的相近量均数,还有目的量节的数目取得现时载荷量的不合理量,依据现时载荷量的不合理量认定现时运用山区的风电机组的叶片是不是带有不合理的风险。
11、优选地,步骤1具体包括:
12、取得各次排风期间降压的以前侦测载荷所形成的簇,把各次排风期间降压的以前侦测载荷所形成的簇依照次序排布,形成以前侦测载荷量队列um={um1,um2...umf...umn},这里,umf为第f次降压的以前侦测载荷所形成的簇,n为以前侦测载荷量队列的侦测次数;现时侦测载荷量的队列是ue={ue1,ue2...ues...umd},这里,ues为现时侦测载荷量内第s个载荷量,d为现时侦测载荷量的数目;
13、取得以前侦测载荷量队列内各个簇内,最大载荷减去最小载荷的量当做被除数,把各次侦测载荷量所用的耗时当做除数;依据被除数和除数的商取得该次以前侦测载荷量的变动量。
14、优选地,把各次以前侦测载荷量的变动量依照次序排布取得以前侦测载荷量的变动量队列h={h1,h2...hf...hn},hf为以前侦测载荷量的变动量队列内第f个变动量,各次以前侦测载荷量的变动量的方程是:
15、
16、方程内:hz为第z次以前侦测载荷量的变动量,uz为第z次以前侦测载荷量期间所用的耗时,uz为第z次以以前侦测载荷量中的最大载荷减去最小载荷而取得的量。
17、优选地,对以前侦测载荷量的变动量队列执行回归取得目的变动量队列的方法,包含:
18、用时点为x轴的参数,以前侦测载荷量的变动量为y轴的参数,运用最小二乘法推导出以前侦测载荷量的变动量队列回归线;对变动量队列回归线内的变动量求取其微商;把微商执行依照次序排布,取得目的变动量队列。
19、优选地,步骤2具体包括:
20、起初,用目的变动量队列中第个目的量为例,依据目的变动量队列内j的第个目的量相应的变动量、第j个目的变动量取得目的变动量队列内的第j个目的量为切分位置的几率,其方程是:
21、
22、方程内:为目的变动量队列内第j个目的量是切分位置的几率,hj为目的变动量队列内第j个目的量相应的变动量,hj+1为目的变动量队列内第j+1个目的量相应的变动量,e为欧拉数,h'(hj)为目的变动量队列内第j个目的变动量,h'(hj+a)为目的变动量队列内第j+a个目的变动量,h'(hj+x)为目的变动量队列内第j+x个目的变动量,这里j<a<x,j和a间相距二目的量,a和x间相距二目的量,j是自然数;
23、依据各个目的量是切分位置的几率和事先设定的几率临界量5.8,取得目的变动量队列内的全部切分位置;也就是在目的量是切分位置的几率高过5.8时,该目的量是目的变动量队列内的切分位置。
24、优选地,取得各个毗邻的2节目的变动量队列相应的变动量队列的相近量的方程是:
25、
26、方程内:l(b,c)为第b节与第c节目的变动量队列相应的变动量队列的相近量,第b节与第c节目的变动量队列相应的变动量队列的相近量能为经由欧式距离运算方法推导而得的第b节与第c节目的变动量队列间的欧式距离,maxhb为第b节目的变动量队列相应的变动量队列内的最高变动量,minhc为第c节目的变动量队列相应的变动量队列内的最低变动量,maxhc为第c节目的变动量队列相应的变动量队列内的最高变动量,minhb为第b节目的变动量队列相应的变动量队列内的最低变动量,为第b节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量的相近量均数,第b节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量的相近量均数,第b节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量的相近量为经由欧式距离运算方法推导而得的第b节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量间的欧式距离,该欧式距离的均数就是第b节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量的相近量均数,为第c节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量的相近量均数,第c节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量的相近量为经由欧式距离运算方法推导而得的第c节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量间的欧式距离,该欧式距离的均数就是第c节目的变动量队列相应的各个变动量和现时侦测载荷量的变动量的相近量均数,max{|maxhb-minhc|,|maxhc-minhb|}为|maxhb-minhc|和|maxhc-minhb|内的最高量,这里|b-c|=1,b与c是自然数;
27、依据各个毗邻的2节目的变动量队列相应的变动量队列的相近量对目的变动量队列节执行组合,也就是设定相近量临界量0.89,在各个毗邻的2节目的变动量队列的相近量高过相近量临界量时,把该毗邻的2节目的变动量队列组合,取得若干目的量节。
28、优选地,取得相应目的量节的关键度的方程是:
29、
30、方程内:xv为第v个目的量节的关键度,mqlfphi(m,e)v为第v个目的量节相应的各个变动量,同现时侦测载荷量的变动量的相近量均数,为第v个目的量节相应的全部变动量的均数,为现时侦测载荷量的变动量,opsn为对其后中括号内的参数执行标准化,e为欧拉数。
31、优选地,步骤5具体包含:
32、取得现时载荷量的不合理量的方程是:
33、
34、方程内:zd为现时侦测载荷量的不合理量,to为同现时侦测载荷量最相近的目的量节相应的以前侦测载荷量的载荷标准差,te为现时侦测载荷量的载荷标准差,o为目的量节的数目,xy为第y个目的量节的关键度,为第y个目的量节相应的全部以前侦测载荷量和现时侦测载荷量的相近量均数,e为欧拉数。
35、优选地,步骤5还包含:
36、设定不合理量临界量,如果现时载荷量的不合理量高过不合理量临界量,那么现时载荷量不合理,这样现时运用的山区的风电机组的叶片就带有不合理的风险,经由远程上位机把该带有现时运用的山区的风电机组的叶片就带有不合理的风险的提示消息传到远程上位机内的提示单元,提示单元显示该提示消息,提示管控者即时对山区的风电机组的叶片执行维护。
37、一种用于复杂山区风力发电设施远程智能维护系统,包括:
38、设于山区的风电机组的叶片上的载荷变送器与同该载荷变送器相连的控制器,控制器相连着移动通信模块,控制器经由移动通信模块与移动通信网内的远程上位机通讯相连,载荷变送器用于收集山区的风电机组的叶片工作期间形成的载荷量且传至远程上位机中执行解析;
39、运行在远程上位机上的模块包含:
40、取得模块一,其用于取得山区的风电机组的叶片上的载荷变送器各次排风期间收集的以前侦测载荷量与现时侦测载荷量,依据所述以前侦测载荷量,取得以前侦测载荷量的变动量队列,对以前侦测载荷量的变动量队列执行回归取得目的变动量队列;
41、取得模块二,其用于依据目的变动量队列内的各个目的量相应的变动量、各个目的变动量取得目的变动量队列内的全部切分位置,这里,各个目的量和各次以前侦测载荷量的变动量相应;
42、取得模块三,其用于依据全部切分位置对目的变动量队列执行分节,取得各个毗邻的2节目的变动量队列相应的变动量队列的相近量,依据相近量确认各个毗邻的2节目的变动量队列是不是要组合,且取得若干目的量节;
43、取得模块四,其用于依据各个目的量节相应的各个变动量和现时侦测载荷量的变动量的相近量均数、各个目的量节相应的全部变动量的均数与现时侦测载荷量的变动量,取得相应目的量节的关键度;
44、认定模块,其用于依据各个目的量节的关键度、各个目的量节相应的全部以前侦测载荷量和现时侦测载荷量的相近量均数,还有目的量节的数目取得现时载荷量的不合理量,依据现时载荷量的不合理量认定现时运用山区的风电机组的叶片是不是带有不合理的风险。
45、本发明的有益效果在于,与现有技术相比,本发明起始取得山区的风电机组的叶片上的载荷变送器传来的以前侦测载荷量与现时侦测载荷量,取得以前侦测载荷量的变动量队列,依据各次以前侦测载荷量的变动量队列回归目的变动量队列,依据目的变动量队列内的各个目的量相应的变动量、各个目的变动量取得目的变动量队列内的全部切分位置,该阶段对各次以前侦测载荷量执行了处置,因为各次以前侦测载荷量面对独个的载荷量来说,更带有典型性,防止了因为排风起始阶段载荷波动不显著形成的偏差,所以,依据各次以前侦测载荷量的变动量队列取得切分位置,让之后的分节更正确;依据全部切分位置对目的变动量队列执行分节,取得各个毗邻的2节目的变动量队列相应的变动量队列的相近量,依据相近量确认各个毗邻的2节目的变动量队列是不是要组合,且取得若干目的量节,依据各个目的量节相应的各个变动量与现时侦测载荷量的变动量的相近量均数、全部变动量的均数与现时侦测载荷量的变动量,取得相应目的量节的关键度;该阶段起始运用切分位置对目的变动量队列执行初步切分,取得了若干的目的变动量队列,因为分节期间仅依据了目的变动量队列内各个变动量相应的变动量与各个目的变动量,所以分节后会带有一些偏差,于是依据各个毗邻的2节目的变动量队列相应的变动量队列的相近量,接着执行分节,取得了最终的目的量节,让分节后带来更精准的功能,宜于之后运算各个目的量节的关键度,确认现时运用山区的风电机组的叶片是不是带有不合理,所以,该阶段达成了依据各次以前侦测载荷量对现时运用山区的风电机组的叶片执行确认,由各次以前侦测载荷量的细小波动内,对现时运用山区的风电机组的叶片执行侦测,确认该山区的风电机组的叶片是不是带有工作不合理的风险。
- 还没有人留言评论。精彩留言会获得点赞!