光致动器件及其制备方法和机器人与流程
本发明涉及光致动,特别是涉及一种光致动器件及其制备方法和机器人。
背景技术:
1、mxene材料由于其出色的光热转换能力,被广泛应用于光驱动致动器结构中。在双层光致动器件中,mxene作为被动层,将光能转换成热能,之后热能作用于功能层,使功能层产生热膨胀、热收缩等效应,由于被动层和功能层的热膨胀系数不同,导致被动层与功能层致动不匹配,从而使致动器件实现弯曲致动效果。
2、对光致动器件的可控操作是实现仿生智能机器人的重要一环,简单的光致动器件结构,如长方形结构,对光致动器件本身的可控操作空间低,致动方向单一,不利于光致动器件的智能化应用。
技术实现思路
1、基于此,有必要针对上述问题,提供一种具有优异的光致动性能且可以实现多方向致动的光致动器件及其制备方法和机器人。
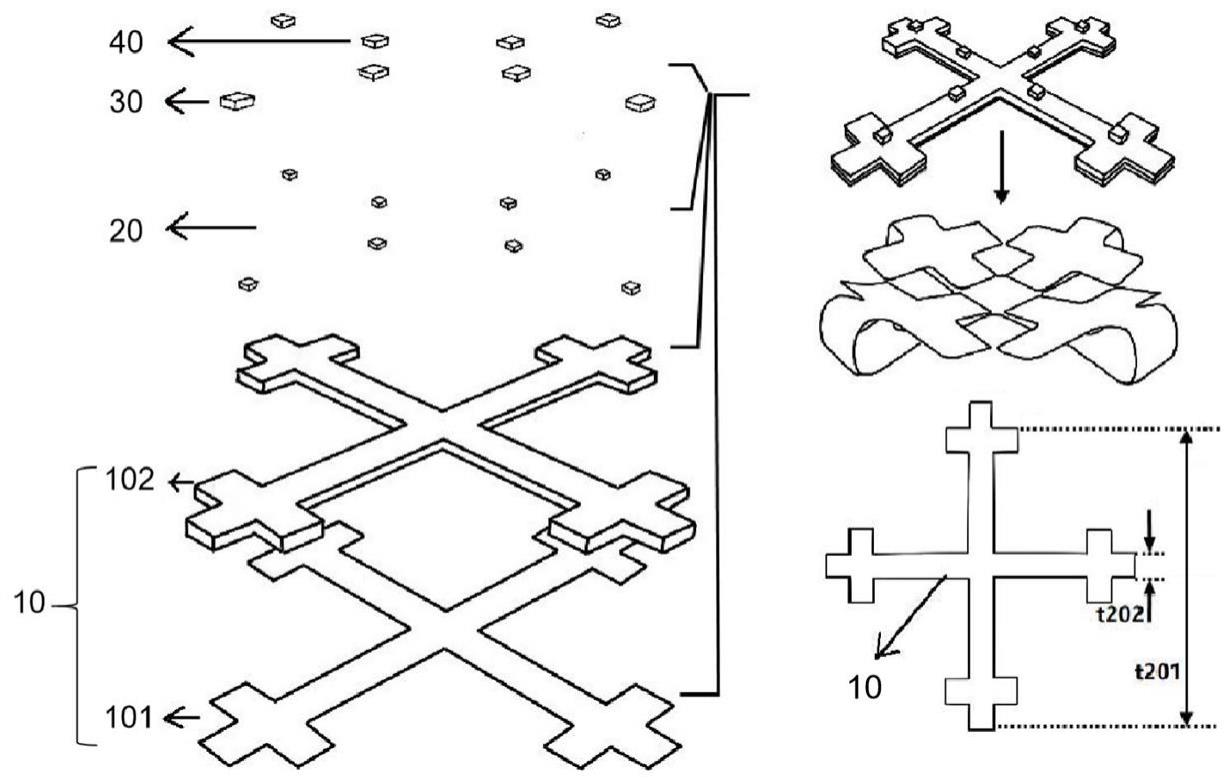
2、一种光致动器件,所述光致动器件包括柔性薄膜,所述柔性薄膜由多个条带部交叉形成,所述柔性薄膜包括层叠设置的柔性衬底以及mxene-纳米纤维复合膜,所述条带部的端部向所述柔性衬底背离所述mxene-纳米纤维复合膜表面的方向弯曲并通过静电吸附方式连接于所述条带部的交叉部位。
3、在一实施方式中,所述柔性衬底的厚度为75μm-150μm。
4、在一实施方式中,所述条带部数量为2-6;
5、及/或,所述条带部的端部为十字型结构。
6、及/或,所述条带部的长度为3.5cm-4.5cm。
7、在一实施方式中,所述柔性衬底选自聚二甲硅氧烷、聚偏二氟乙烯、双向拉伸聚丙烯、低密度聚乙烯、聚碳酸酯、聚甲基丙烯酸甲酯中的至少一种。
8、在一实施方式中,所述光致动器件还包括有静电贴以及静电贴承载片,所述静电贴设置于所述条带部的端部与所述条带部的交叉部位中的一者,所述静电贴承载片设置于所述条带部的端部与所述条带部的交叉部位中的另一者,所述条带部的端部通过所述静电贴以及所述静电贴承载片之间的静电吸附方式连接于所述条带部的交叉部位。
9、一种如上述的光致动器件的制备方法,包括如下步骤:
10、提供mxene,并制成mxene悬浊液,将所述mxene悬浊液与纳米纤维混合,得到mxene-纳米纤维复合材料悬浊液;
11、提供柔性衬底,将所述mxene-纳米纤维复合材料悬浊液置于柔性衬底的任一表面并干燥形成mxene-纳米纤维复合膜,得到柔性薄膜;
12、将所述柔性薄膜进行切割,得到多个条带部交叉形成的柔性薄膜;
13、将所述条带部的端部向所述柔性衬底背离所述mxene-纳米纤维复合膜表面的方向弯曲并通过静电吸附方式连接于所述条带部的交叉部位,得到光致动器件。
14、在一实施方式中,所述mxene与所述纳米纤维的质量比为1:10-4:10。
15、在一实施方式中,所述mxene选自ti3c2tx;
16、及/或,所述纳米纤维选自碳纳米纤维、细菌纤维素、丝素蛋白中的至少一种。
17、在一实施方式中,所述mxene悬浊液的浓度为1.0mg/ml-5.0mg/ml。
18、一种机器人,包括如上述的光致动器件。
19、本发明提供的光致动器件中,mxene-纳米纤维复合膜作为被动层,具有优异的光热转换能力以及机械性能,柔性衬底作为功能层,由于被动层与功能层的热膨胀系数不同,在受到光照时被动层与功能层的光热膨胀和光热收缩不匹配,从而使光致动器件产生致动。由于光致动器件具有特定的结构,当光致动产生的应力大于条带部的端部与条带部的交叉部位间的静电作用力时,条带部的端部与条带部的交叉部位分离,使得条带部向相反于弯曲的方向弹射,实现光致动器件致动方向的选择性和可控性。
20、因此,包括本发明光致动器件的机器人可以实现方向的可控性和选择性。
技术特征:
1.一种光致动器件,其特征在于,所述光致动器件包括柔性薄膜,所述柔性薄膜由多个条带部交叉形成,所述柔性薄膜包括层叠设置的柔性衬底以及mxene-纳米纤维复合膜,所述条带部的端部向所述柔性衬底背离所述mxene-纳米纤维复合膜表面的方向弯曲并通过静电吸附方式连接于所述条带部的交叉部位。
2.根据权利要求1所述的光致动器件,其特征在于,所述柔性衬底的厚度为75μm-150μm。
3.根据权利要求1所述的光致动器件,其特征在于,所述条带部数量为2-6;
4.根据权利要求1所述的光致动器件,其特征在于,所述柔性衬底选自聚二甲硅氧烷、聚偏二氟乙烯、双向拉伸聚丙烯、低密度聚乙烯、聚碳酸酯、聚甲基丙烯酸甲酯中的至少一种。
5.根据权利要求1所述的光致动器件,其特征在于,所述光致动器件还包括有静电贴以及静电贴承载片,所述静电贴设置于所述条带部的端部与所述条带部的交叉部位中的一者,所述静电贴承载片设置于所述条带部的端部与所述条带部的交叉部位中的另一者,所述条带部的端部通过所述静电贴以及所述静电贴承载片之间的静电吸附方式连接于所述条带部的交叉部位。
6.一种如权利要求1至权利要求5任一项所述的光致动器件的制备方法,其特征在于,包括如下步骤:
7.根据权利要求6所述的光致动器件的制备方法,其特征在于,所述mxene与所述纳米纤维的质量比为1:10-4:10。
8.根据权利要求6所述的光致动器件的制备方法,其特征在于,所述mxene选自ti3c2tx;
9.根据权利要求6所述的光致动器件的制备方法,其特征在于,所述mxene悬浊液的浓度为1.0mg/ml-5.0mg/ml。
10.一种机器人,其特征在于,包括如权利要求1至权利要求5任一项所述的光致动器件。
技术总结
本发明涉及一种光致动器件及其制备方法和机器人,所述光致动器件包括柔性薄膜,所述柔性薄膜由多个条带部交叉形成,所述柔性薄膜包括层叠设置的柔性衬底以及MXene‑纳米纤维复合膜,所述条带部的端部向所述柔性衬底背离所述MXene‑纳米纤维复合膜表面的方向弯曲并通过静电吸附方式连接于所述条带部的交叉部位。本发明的光致动器件具有优异的光致动性能且可以实现多方向致动。
技术研发人员:代甜甜,陈梦晓,杨青,王蒙,刘雁婷,王贤迪
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!