偏航制动系统异常监测方法、装置、电子设备及存储介质与流程
本发明涉及风力发电,具体而言,涉及一种偏航制动系统异常监测方法、装置、电子设备及存储介质。
背景技术:
1、近年来,风电机组装机呈现出爆发式增长,风电机组安装环境复杂,偏航系统作为风电机组重要的对风执行机构,偏航制动系统异常将直接影响风电机组运行安全。偏航制动系统主要包括偏航制动液压泵、偏航制动盘、偏航驱动电机电磁制动器、偏航制动卡钳及偏航制动摩擦片等几大部分组成,随着工作年限增加,偏航制动摩擦片被磨损后,将降低机舱制动稳定性,影响风电机组对风精度和运行安全。当偏航制动摩擦片出现严重磨损时,若不及时更换将对偏航制动盘造成不可修复的影响,将带来巨大的人力和物力损失。
2、目前,对风电机组偏航制动摩擦片的磨损情况检测通常通过人工定检完成,及时性较差且耗费大量人工成本,同时检出准确性难以保障。自动化监测摩擦片磨损主要通过增加振动传感器,针对偏航过程中频谱变化识别摩擦片异常,安装成本较高。
技术实现思路
1、本发明的目的在于提供一种偏航制动系统异常监测方法、装置、电子设备及存储介质,能够提高偏航制动系统监测的准确度。
2、为了实现上述目的,本申请实施例采用的技术方案如下:
3、第一方面,本申请实施例提供了一种偏航制动系统异常监测方法,所述方法包括:
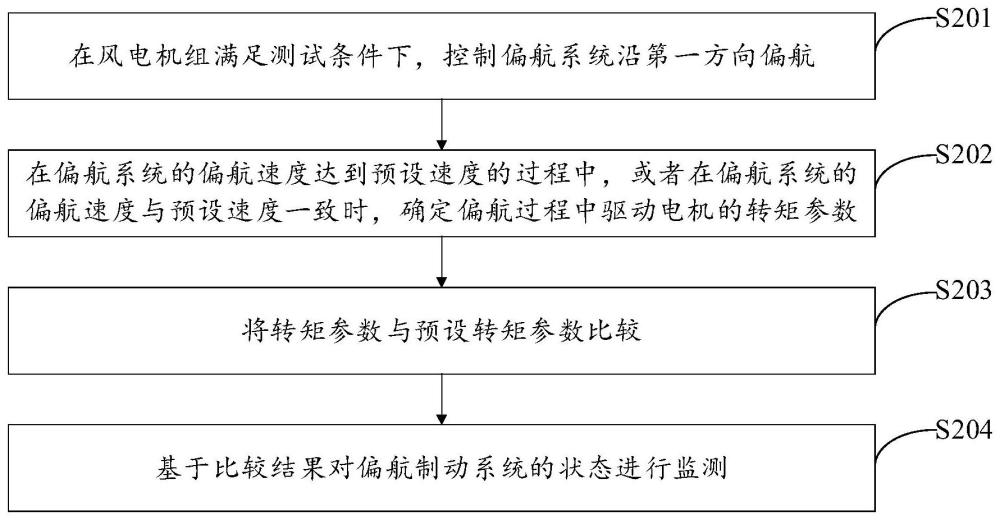
4、在风电机组满足测试条件下,控制偏航系统沿第一方向偏航;
5、在所述偏航系统的偏航速度达到预设速度的过程中,或者在所述偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的转矩参数,其中,所述转矩参数包括最大静摩擦转矩或者滑动摩擦转矩;
6、将所述转矩参数与预设转矩参数比较;
7、基于比较结果对所述偏航制动系统的状态进行监测。
8、可选的,所述方法还包括:
9、确定所述风电机组的状态是否为停机状态;
10、在所述风电机组处于停机状态时,确定所述风电机组的桨叶是否处于收桨位置;
11、在所述风电机组的桨叶处于收桨位置时,确定所述风电机组所处位置的风速是否小于预设风速;
12、在所述风电机组所处位置的风速小于预设风速时,确定所述偏航制动系统的偏航制动液压压力是否为余压状态;
13、在所述偏航制动系统的偏航制动液压压力为余压状态时,确定所述偏航制动系统的液压泵的供压是否正常;
14、在所述偏航制动系统的液压泵的供压正常时,则确定所述风电机组满足测试条件。
15、可选的,在所述偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的转矩参数的步骤,包括:
16、在所述偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的滑动摩擦转矩;
17、所述将所述转矩参数与预设转矩参数比较的步骤,包括:
18、将所述滑动摩擦转矩与对应的标准滑动摩擦转矩进行比较;
19、所述基于比较结果对所述偏航制动系统的状态进行监测的步骤,包括:
20、在所述滑动摩擦转矩小于所述标准滑动摩擦转矩时,确定所述偏航制动系统的偏航制动摩擦片磨损或偏航制动盘存在油污;
21、在所述滑动摩擦转矩大于所述标准滑动摩擦转矩时,确定所述偏航制动系统的偏航驱动电机电磁制动器异常或偏航轴承、偏航齿轮箱异常。
22、可选的,所述在所述偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的滑动摩擦转矩的步骤,包括:
23、获取预设时间段内预设数量的第一时序数据,其中,所述第一时序数据包括构成驱动电机的各子电机的子输出转矩;
24、确定所述第一时序数据的第一条数;
25、基于所有所述子电机的子输出转矩和所述第一条数,确定偏航过程中驱动电机的滑动摩擦转矩。
26、可选的,所述滑动摩擦转矩满足以下公式:
27、
28、其中,mt为滑动摩擦转矩,min表示第i条时序数据中第n个子电机的子输出转矩,n表示子电机总个数,k表示时序数据的条数。
29、可选的,在所述偏航系统的偏航速度达到预设速度的过程中,确定偏航过程中驱动电机的转矩参数的步骤,包括:
30、在所述偏航系统的偏航速度达到预设速度的过程中,确定偏航过程中驱动电机的最大静摩擦转矩;
31、所述将所述转矩参数与预设转矩参数比较的步骤,包括:
32、将最大静摩擦转矩与对应的标准静摩擦转矩进行比较;
33、所述基于比较结果对所述偏航制动系统的状态进行监测的步骤,包括:
34、在最大静摩擦转矩小于标准静摩擦转矩时,输出第一提示信息,其中,提示信息表征偏航制动系统的偏航刹车摩擦系数降低,提示偏航制动系统的偏航制动摩擦片磨损或偏航制动盘存在油污;
35、在最大静摩擦转矩大于标准静摩擦转矩时,输出第二提示信息,其中,提示信息用于提示偏航制动系统的偏航驱动电机电磁制动器异常或偏航轴承、偏航齿轮箱异常。
36、第二方面,本申请实施例提供了一种偏航制动系统异常监测装置,所述装置包括:
37、控制模块,用于在风电机组满足测试条件下,控制偏航系统沿第一方向偏航;
38、确定模块,用于在所述偏航系统的偏航速度达到预设速度的过程中,或者在所述偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的转矩参数,其中,所述转矩参数包括输出转矩、最大静摩擦转矩或者滑动摩擦转矩;
39、比较模块,用于将所述转矩参数与预设转矩参数比较;
40、监测模块,用于基于比较结果对所述偏航制动系统的状态进行监测。
41、第三方面,本申请实施例提供了一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现所述偏航制动系统异常监测方法的步骤。
42、第四方面,本申请实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现所述偏航制动系统异常监测方法的步骤。
43、本申请具有以下有益效果:
44、本申请通过在风电机组满足测试条件下,控制偏航系统沿第一方向偏航,在偏航系统的偏航速度达到预设速度的过程中,或者在偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的转矩参数,其中,转矩参数包括最大静摩擦转矩或者滑动摩擦转矩,将转矩参数与预设转矩参数比较,基于比较结果对偏航制动系统的状态进行监测。可以实现在无需增加附加设备的情况下,提高偏航制动系统监测的准确度。
技术特征:
1.一种偏航制动系统异常监测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,在所述偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的转矩参数的步骤,包括:
4.根据权利要求3所述的方法,其特征在于,所述在所述偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的转矩参数的步骤,包括:
5.根据权利要求4所述的方法,其特征在于,所述滑动摩擦转矩满足以下公式:
6.根据权利要求1所述的方法,其特征在于,在所述偏航系统的偏航速度达到预设速度的过程中,确定偏航过程中驱动电机的转矩参数的步骤,包括:
7.一种偏航制动系统异常监测装置,其特征在于,所述装置包括:
8.一种电子设备,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1-6任一项所述方法的步骤。
9.一种存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-6中任一项所述方法的步骤。
技术总结
本发明的实施例提供了一种偏航制动系统异常监测方法、装置、电子设备及存储介质,涉及风力发电领域,方法包括:在风电机组满足测试条件下,控制偏航系统沿第一方向偏航,在偏航系统的偏航速度达到预设速度的过程中,或者在偏航系统的偏航速度与预设速度一致时,确定偏航过程中驱动电机的转矩参数,其中,转矩参数包括最大静摩擦转矩或者滑动摩擦转矩,将转矩参数与预设转矩参数比较,基于比较结果对偏航制动系统的状态进行监测。可以实现在无需增加附加设备的情况下,提高偏航制动系统监测的准确度。
技术研发人员:曹俊伟,黄凌翔,章滔,徐可
受保护的技术使用者:哈电风能有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!