一种风电机组的叶尖净空距离测量装置、方法及系统与流程
本技术涉及风力发电,尤其涉及一种风电机组的叶尖净空距离测量装置、方法及系统。
背景技术:
1、目前,随着风机技术的不断进步和进入平价时代后的诸多挑战,当前风电机组“长叶片、大功率、高塔筒”的发展趋势凸显。风机叶片作为风电机组最大的部件和最主要的受力载体,它的加长和轻柔设计成为风电机组的主要方向。然而随着叶片柔性和长度的增加,叶片产生的形变越来越大,将会降低处在复杂风况或极端天气等因素下的风电机组叶尖净空距离,甚至会引发扫塔的风险,发生扫塔后轻则更换叶片、重则引起倒塔事故,将带来巨大的人身财产损失。
2、现有技术中,为了解决叶尖净空距离实时精准检测的难题,主要有以下几种方式:一、在机舱底部安装视频检测装置,实时捕捉获取风力发电机组在运行过程中的图像(图像数据涵盖叶片的尖端以及塔筒),识别图像数据中的叶尖位置和塔筒边缘,并设定安全区域和危险区域,一旦识别到叶尖图像进入到危险区域,立即上报风机主控进行处理,从而避免叶片扫塔情况的发生;二、在机舱底部安装激光雷达发射和接收装置,通过发射和接收激光光束来实时监测叶尖净空距离,避免扫塔事故;三、在塔筒的固定高度处,围绕塔筒安装多个固定式测距装置,实时监测叶尖净空距离。
3、然而,上述实现方法中,存在以下几个方面的缺陷:一、由于很多直驱、半直驱机型的机舱设计原因,导致测量装置难以有效部署;二、在风场出现一些较为恶劣的天气时,如大雨、雾霾、沙尘暴、大雾等干扰下,很容易产生误报甚至完全失效。因此,目前实现叶尖净空距离的实时精准检测存在测量装置难以部署以及恶劣天气下易误报易失效的问题。
技术实现思路
1、本技术提供一种风电机组的叶尖净空距离测量装置、方法及系统,可以解决现有技术中测量装置难以有效部署以及恶劣天气下易误报易失效的问题,降低了测量装置的安装复杂度以及安装成本,并且实现了全场景下风电机组的叶尖净空距离的实时在线监测和预警,最大限度地避免了风机叶片扫塔事故的发生,从而降低了人身财产损失。
2、为达到上述目的,本技术采用如下技术方案:
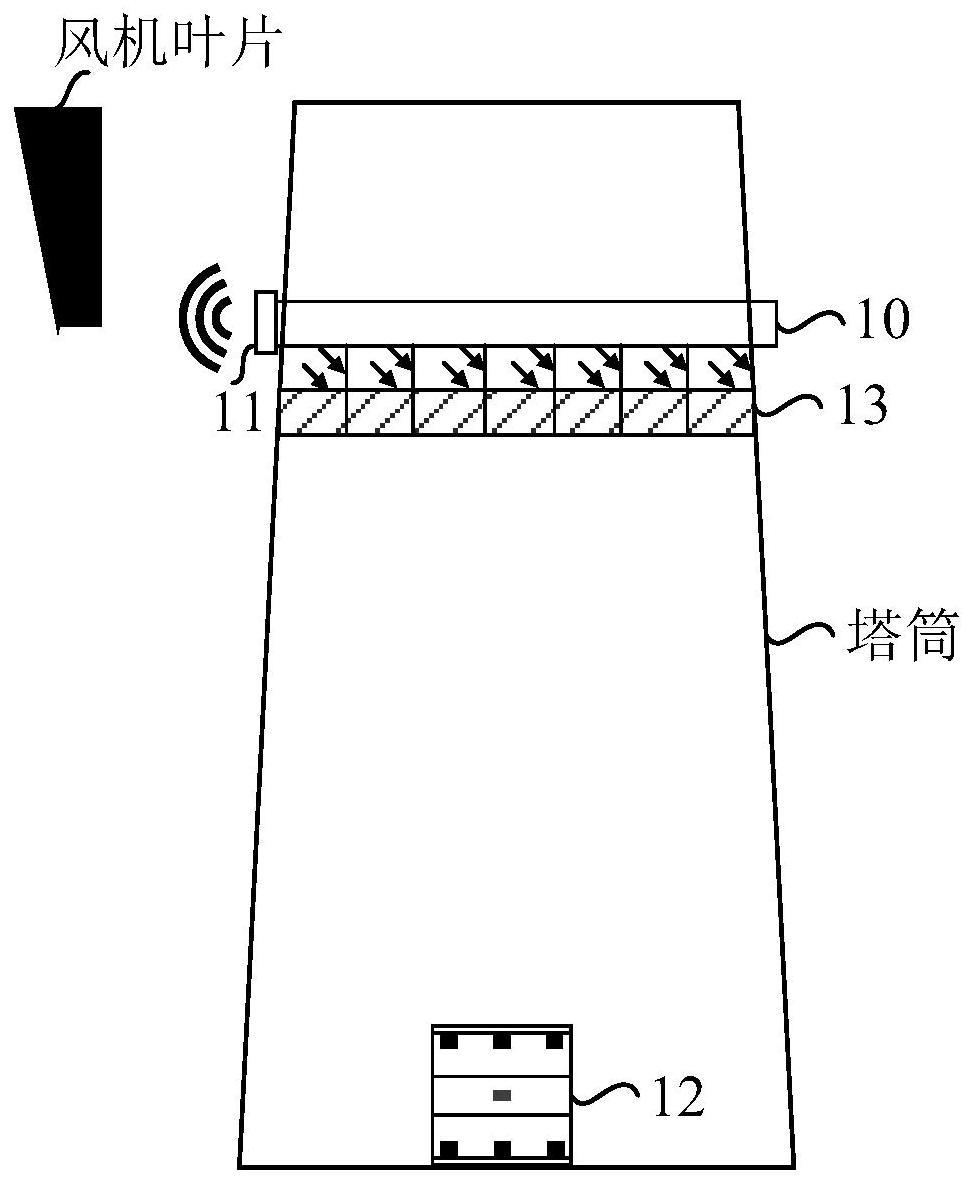
3、第一方面,本技术提供一种风电机组的叶尖净空距离测量装置,风电机组包括塔筒和风机,风机设置在塔筒上,风机包括风机叶片和风机主控,该叶尖净空距离测量装置包括:
4、滑动轨道、净空测量定位模块和净空测量控制模块,滑动轨道在风机叶片的叶尖正对塔筒位置围绕塔筒抱箍设置,净空测量定位模块安装在滑动轨道上;
5、净空测量控制模块,用于接收风机主控发送的风机的偏航信息,并将偏航信息传送至净空测量定位模块;
6、净空测量定位模块,用于基于偏航信息进行偏航同步并测量叶尖净空距离;
7、净空测量控制模块,还用于接收净空测量定位模块传送的叶尖净空距离,并根据叶尖净空距离确定净空监测结果,向风机主控反馈净空监测结果。
8、可选的,净空测量控制模块根据叶尖净空距离确定净空监测结果,向风机主控反馈净空监测结果,包括:判断叶尖净空距离是否大于预设净空距离限值;在叶尖净空距离大于预设净空距离限值时,向风机主控反馈正常监测结果;在叶尖净空距离不大于预设净空距离限值时,向风机主控反馈异常监测结果;其中,正常监测结果和异常监测结果中均包括叶尖净空距离。
9、可选的,净空测量控制模块在接收风机主控发送的风机的偏航信息之前,还用于:尝试与净空测量定位模块建立无线通信;若与净空测量定位模块成功建立无线通信,则触发接收风机主控发送的风机的偏航信息;若尝试预设次数后仍无法与净空测量定位模块成功建立无线通信,则向风机主控发送通信异常告警信息。
10、可选的,净空测量控制模块接收净空测量定位模块传送的叶尖净空距离,包括:净空测量控制模块通过无线通信的方式接收净空测量定位模块传送的叶尖净空距离。
11、可选的,叶尖净空距离测量装置还包括供电模块;供电模块,用于为滑动轨道和净空测量定位模块供电。
12、可选的,净空测量定位模块在净空测量控制模块与净空测量定位模块成功建立无线通信之后,还用于:检测供电模块的剩余电量;在剩余电量充足时,向净空测量控制模块反馈电量充足通知,以触发净空测量控制模块执行接收风机主控发送的风机的偏航信息;在剩余电量不足时,控制供电模块充电。
13、可选的,净空测量定位模块在基于偏航信息进行偏航同步之后,还包括:确定在预设时长内是否能完成偏航同步;若在预设时长内能完成偏航同步,则触发测量叶尖净空距离;若在预设时长内不能完成偏航同步,则通过净空测量控制模块向风机主控发送同步异常信息。
14、可选的,净空测量控制模块由风机供电。
15、本技术提供的技术方案中,提出了一种风电机组的叶尖净空距离测量装置,风电机组包括塔筒和风机,风机设置在塔筒上,风机包括风机叶片和风机主控,该叶尖净空距离测量装置包括滑动轨道、净空测量定位模块和净空测量控制模块。一方面,滑动轨道在风机叶片的叶尖正对塔筒的位置围绕塔筒进行抱箍设置,并且净空测量定位模块安装在该滑动轨道上,降低了测量装置的安装复杂度以及安装成本,有效地解决了由于风电机组的机舱设计的原因导致的测量装置部署困难的问题;另一方面,净空测量控制模块在启动之后,可以实时接收风机主控发送的风机的偏航信息,并且可以将接收到的偏航信息实时传送给净空测量定位模块,净空测量定位模块可以基于接收到的偏航信息实时进行偏航同步以及测量叶尖净空距离,并且可以将叶尖净空距离实时传送给净空测量控制模块,净空测量控制模块可以基于接收到的叶尖净空距离确定净空测量结果,并向风机主控反馈该净空测量结果,以告知风机主控此时风机叶片的叶尖是否有扫塔的风险,风机主控可以基于风机的实际状况进行后续安全性操作。通过净空测量定位模块与净空测量控制模块之间的通信交互,以及净空测量控制模块与风机主控之间的通信交互,能够实现全场景下风电机组叶尖净空距离的实时在线监测和预警,有效地解决了恶劣天气下易误报易失效的问题,最大限度地避免了风机叶片扫塔事故的发生,从而降低了人身财产损失。执行本技术的技术方案可以降低测量装置的安装复杂度以及安装成本,并且可以实现全场景下风电机组叶尖净空距离的实时在线监测和预警,最大限度地避免了风机叶片扫塔事故的发生,从而降低了人身财产损失。
16、第二方面,本技术提供一种风电机组的叶尖净空距离测量方法,该方法可以应用于第一方面提供的风电机组的叶尖净空距离测量装置,该方法包括:
17、接收风机主控发送的风机的偏航信息;
18、基于偏航信息进行偏航同步并测量叶尖净空距离;
19、根据叶尖净空距离确定净空监测结果,向风机主控反馈净空监测结果。
20、第三方面,本技术提供一种风电机组的叶尖净空距离测量系统,包括风电机组、以及第一方面提供的风电机组的叶尖净空距离测量装置。
21、本技术中第二方面和第三方面的描述,可以参考第一方面的详细描述;并且,第二方面和第三方面的描述的有益效果,可以参考第一方面的有益效果分析,此处不再赘述。
22、在本技术中,对于上述涉及到的设备或功能模块的名称不构成限定,在实际实现中,这些设备或功能模块可以以其他名称出现。只要各个设备或功能模块的功能和本技术类似,均属于本技术及其等同技术的范围之内。
23、本技术的这些方面或其他方面在以下的描述中会更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!