风力发电机组的风轮定位方法及风力发电机组与流程
本发明涉及风力发电设备,尤其涉及一种风力发电机组的风轮定位方法及风力发电机组。
背景技术:
1、风力发电机组的变桨系统是确保风机在不同风速条件下高效运行的关键组成部分,变桨系统通常包括风轮、变桨驱动系统、传感器等元件,风力发电机组通常在恶劣的自然环境中运行,暴露在不同的气象条件下,风轮上的桨叶和与之相关的结构可能受到风、雨、雪、冰等自然因素的侵蚀和损坏,导致磨损和疲劳,因此为防止变桨系统损坏,需要经常对变桨系统进行维护。
2、对变桨系统进行维护时,通常需要将风轮固定在一个角度上,然后再由工作人员进行维护,而现有技术中将风轮停止时通常通过工作人员在风轮被风吹到固定位置时,将锁止结构与风轮上的配合结构锁合以将风轮固定,但由于多个工作人员之间配合存在时间差,通常需要反复等待风轮转动至固定位置才能将风轮固定,甚至在小风或无风情况下需要人力拖动风轮,浪费大量人力,还导致固定风轮的效率低下。
技术实现思路
1、本发明的主要目的在于提供一种风力发电机组的风轮定位方法及风力发电机组,旨在解决现有的风力发电机组固定风轮的效率低下的问题。
2、为实现上述目的,本发明提供一种风力发电机组的风轮定位方法,包括以下步骤:
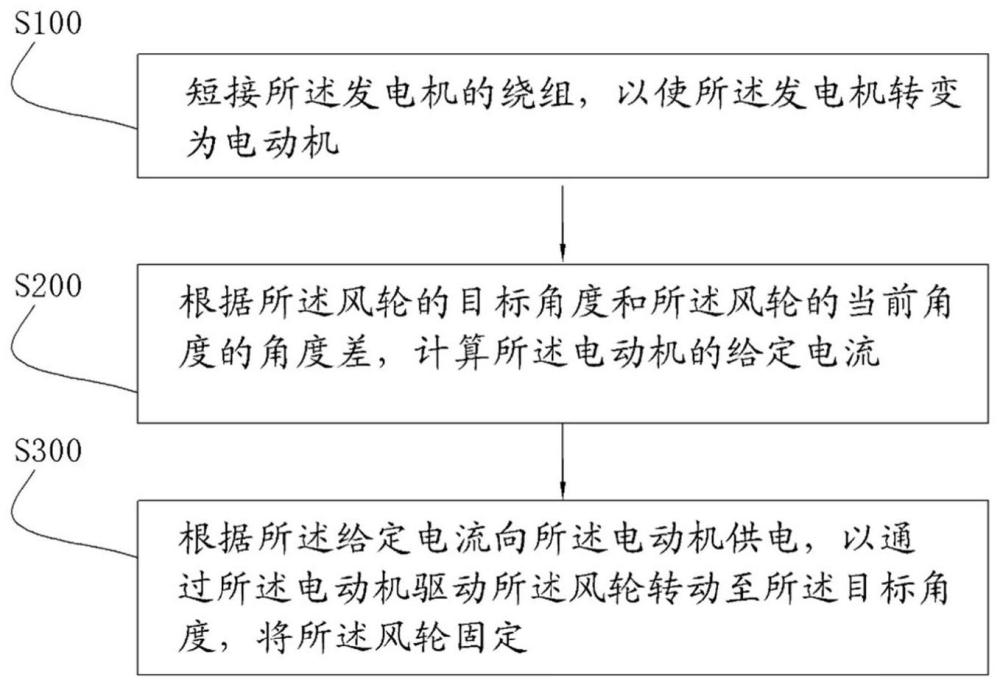
3、短接所述发电机的绕组,以使所述发电机转变为电动机;
4、根据所述风轮的目标角度和所述风轮的当前角度的角度差,计算所述电动机的给定电流;
5、根据所述给定电流向所述电动机供电,以通过所述电动机驱动所述风轮转动至所述目标角度,将所述风轮固定。
6、优选地,所述给定电流的计算公式为:
7、
8、其中,k1、k2和k3均为pid参数,且分别为比例常数、积分系数和微分系数,δθ(t)为所述角度差,i是给定电流,t是时间。
9、优选地,所述根据所述给定电流向所述电动机供电,以通过所述电动机驱动所述风轮转动至所述目标角度,将所述风轮固定的步骤包括:
10、根据所述给定电流向所述风轮供电,在所述风轮转动的过程中逐步调整所述给定电流;
11、当所述风轮转动至所述目标角度时,制动所述风轮;
12、检测所述风轮的当前角度并与所述目标角度比对;
13、若所述风轮的当前角度与所述目标角度的角度差在预设差值范围内,则将所述风轮固定;
14、若所述风轮的当前角度与所述目标角度的角度差在预设差值范围外,则返回执行所述根据所述风轮的目标角度和所述风轮的当前角度的角度差,计算所述电动机的给定电流的步骤,直至所述风轮的当前角度与所述目标角度的角度差在预设差值范围内。
15、优选地,所述在所述风轮转动的过程中逐步调整所述给定电流的步骤包括:
16、实时计算所述风轮转动过程中的当前角度和目标角度的角度差;
17、根据所述风轮的当前角度和目标角度的角度差,通过pid算法实时调整所述pid参数,以调整所述给定电流的大小。
18、优选地,所述将所述风轮固定的步骤包括:
19、将所述的风轮锁销顶出并与所述风轮上的插销孔卡合,以固定所述风轮。
20、为实现上述目的,本发明还提供一种风力发电机组,应用于上述的风力发电机组的风轮定位方法,所述风力发电机组包括壳体、发电机、风轮、角度传感器、制动器、齿轮箱和控制器,所述发电机位于所述壳体内,所述风轮安装于所述壳体上并与齿轮箱的输入轴连接,所述齿轮箱的输出轴与所述发动机的转子连接,所述风轮用于通过所述齿轮箱带动所述发电机的转子转动,所述角度传感器安装在所述输入轴或所述风轮上并用于检测所述风轮的当前角度,所述制动器安装在所述齿轮箱的输出轴上并用于制动所述风轮,所述角度传感器、所述发电机和所述制动器均与所述控制器电连接。
21、优选地,所述角度传感器为绝对值编码器。
22、优选地,所述风轮上设置有插销孔,所述壳体上可活动地安装有锁销,所述锁销用于插入所述插销孔以将所述风轮固定。
23、优选地,所述壳体上设置有驱动件,所述锁销安装在所述驱动件的输出轴上,所述驱动件用于驱动所述锁销朝向或远离所述风轮移动。
24、优选地,所述驱动件为液压驱动件。
25、在本发明的技术方案中,将风力发电机组的发电机的绕组短接,通过将发电机的绕组短接,形成一个电流回路,这个电流在绕组中产生的磁场会与发电机转子上的磁场相互作用,导致转子开始旋转,从而通过发电机的转子带动风轮转动,然后通过风轮的目标角度和所述风轮算电动机的给定电流,根据给定电流向电动机供电,防止风轮转动过快导致风轮停止时超出固定位置工作人员无法将风轮固定,使得风轮缓慢转动,然后在风轮到达目标角度时将风轮制动,此时风轮位于固定位置处,便于工作人员对风轮进行固定维护。本发明通过将风力发电机组的发电机的绕组短接,然后通过给定电流驱动风轮转动,无需等风力吹动风轮或是人力拉动风轮,在无风或小风情况下仍能对风轮进行固定,同时及时制动风轮,防止多个工作人员配合的时间差导致风轮转过固定位置的发生,通过电机驱动风轮还减少了工作人员的数量,减少了人力和物力的浪费,提高了风轮的固定效率。
技术特征:
1.一种风力发电机组的风轮定位方法,其中,所述风力发电机组包括风轮和发电机,其特征在于,所述风力发电机组的风轮定位方法包括以下步骤:
2.如权利要求1所述的风力发电机组的风轮定位方法,其特征在于,所述给定电流的计算公式为:
3.如权利要求2所述的风力发电机组的风轮定位方法,其特征在于,所述根据所述给定电流向所述电动机供电,以通过所述电动机驱动所述风轮转动至所述目标角度,将所述风轮固定的步骤包括:
4.如权利要求3所述的风力发电机组的风轮定位方法,其特征在于,所述在所述风轮转动的过程中逐步调整所述给定电流的步骤包括:
5.如权利要求3所述的风力发电机组的风轮定位方法,其特征在于,所述将所述风轮固定的步骤包括:
6.一种风力发电机组,应用于如权利要求1-5中任一项所述的风力发电机组的风轮定位方法,其特征在于,所述风力发电机组包括壳体、发电机、风轮、角度传感器、制动器、齿轮箱和控制器,所述发电机位于所述壳体内,所述风轮安装于所述壳体上并与齿轮箱的输入轴连接,所述齿轮箱的输出轴与所述发动机的转子连接,所述风轮用于通过所述齿轮箱带动所述发电机的转子转动,所述角度传感器安装在所述输入轴或所述风轮上并用于检测所述风轮的当前角度,所述制动器安装在所述齿轮箱的输出轴上并用于制动所述风轮,所述角度传感器、所述发电机和所述制动器均与所述控制器电连接。
7.如权利要求6所述的风力发电机组,其特征在于,所述角度传感器为绝对值编码器。
8.如权利要求6所述的风力发电机组,其特征在于,所述风轮上设置有插销孔,所述壳体上可活动地安装有锁销,所述锁销用于插入所述插销孔以将所述风轮固定。
9.如权利要求8所述的风力发电机组,其特征在于,所述壳体上设置有驱动件,所述锁销安装在所述驱动件的输出轴上,所述驱动件用于驱动所述锁销朝向或远离所述风轮移动。
10.如权利要求9所述的风力发电机组,其特征在于,所述驱动件为液压驱动件。
技术总结
本发明公开了一种风力发电机组的风轮定位方法及风力发电机组,其中,风力发电机组的风轮定位方法包括以下步骤:短接所述发电机的绕组,以使所述发电机转变为电动机;根据所述风轮的目标角度和所述风轮的当前角度的角度差,计算所述电动机的给定电流;根据所述给定电流向所述电动机供电,以通过所述电动机驱动所述风轮转动至所述目标角度,将所述风轮固定。本发明通过将风力发电机组的发电机的绕组短接,然后通过给定电流驱动风轮转动,无需等风力吹动风轮或是人力拉动风轮,在无风或小风情况下仍能对风轮进行固定,通过电机驱动风轮还减少了工作人员的数量,减少了人力和物力的浪费,提高了风轮的固定效率。
技术研发人员:姜圣,戴巨川,李懿航,谢伟伟
受保护的技术使用者:三一重能股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!