一种风力发电机组机舱位置测控系统和方法与流程
本发明涉及风力发电,具体涉及一种风力发电机组机舱位置测控系统和方法。
背景技术:
1、随着风力发电机组功率越来越大,机组载荷也越来越大,尤其是在有抗台风需求的风况下,机组机舱位置信息的灵敏性、准确性和可靠性问题越来越凸显,相应的对机舱位置测控功能的灵敏性、准确性和可靠性提出更高要求。
技术实现思路
1、有鉴于此,本发明要解决的问题是提供一种风力发电机组机舱位置测控系统和方法,通过该系统和方法从机舱位置的测量、机舱偏航和控制方法等一系列联动过程,综合解决风力发电机组机舱位置测控的灵敏性、准确性和可靠性问题,从而提升风力发电机组的有效利用率。
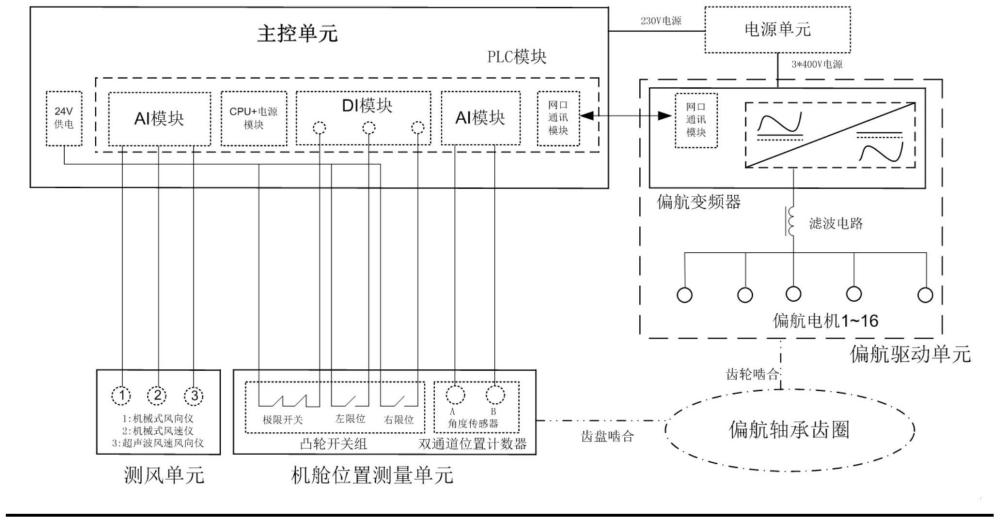
2、本发明通过以下技术手段解决上述技术问题:本发明提供一种风力发电机组机舱位置测控系统,包括,
3、机舱位置测量单元:包括凸轮开关组和双通道位置计数器,凸轮开关组用于触发解缆,所述双通道位置计数器用于测量机舱角度位置;
4、测风单元:包括机械式风速风向仪和超声波风速风向仪,用于给机组提供的风向风速信息;
5、偏航驱动单元:用于与plc模块网口通信接收偏航指令,并驱动机舱进行偏航动作;
6、主控单元:所述主控单元包括电源模块和plc模块,所述plc模块用于接收机舱位置测量单元和测风单元的模拟信号以及限位数字信号,同时与偏航驱动单元进行通信,下发偏航指令;
7、电源单元:所述电源单元用于给主控单元、机舱位置测量单元、测风单元以及偏航驱动单元提供电源。
8、进一步,所述机舱位置测量单元包括凸轮开关组和由两个角度传感器构成的双通道位置计数器,所述双通道位置计数器包括设置在机舱上的角度传感器a和角度传感器b,所述角度传感器a和所述角度传感器b为不同精度的计数。
9、进一步,所述偏航驱动单元包括偏航变频器、滤波电流以及偏航电机,所述偏航变频器用于与plc进行网口通信,并执行偏航指令驱动偏航电机进行机舱偏航。
10、进一步,所述plc模块包括ai模块、di模块以及网口通信模块,所述ai模块用于接收机舱位置测量单元和测风单元的4~20ma模拟信号,所述di模块用于接收机舱位置测量单元的限位数字信号,所述网口通信模块用于与偏航变频器进行通信,plc模块通过网口通信下发偏航指令。
11、进一步,所述电源单元向偏航驱动单元提供交流400v电源,所述电源单元向主控单元提供230v交流电源。
12、进一步,所述角度传感器a和角度传感器b分别通过蜗齿轮和小圆锥齿轮在同一个蜗杆的驱动下转动,且角度传感器a和角度传感器b的零点相同。
13、本发明提供一种风力发电机组机舱位置测控方法,包括如下步骤:
14、获取双通道位置计数器的角度传感器a和角度传感器b的数据;
15、首先判断角度传感器b的数据是否正常;
16、若角度传感器b的数据正常,则记录角度传感器的数据,且继续判断角度传感器a的数据是否正常;
17、若角度传感器a的数据不正常,则将角度传感器b的数据作为机舱当前位置;
18、若角度传感器a的数据正常,则通过公式计算机舱位置c:机舱位置c=角度传感器a圈数*角度传感器a的量程+角度传感器a当前单圈内的测量值,其中a的旋转圈数根据b的值计算得出,其中,并记录c的数据,即综合a和b的值计算出机舱位置c,所述角度传感器a和角度传感器b的零点相同;
19、然后将c的数据与角度传感器b的数据进行比较,哪个数据更平稳精确则将其作为机舱当前角度位置。
20、进一步,获得当前机舱当前角度位置数据后,还包括如下步骤:
21、获取风向数据和风速数据;
22、若风向数据和风速数据正常,则判断机舱当前位置是否正常;
23、若机舱当前位置以及偏航通信均正常,则通过当前风向数据、风速数据和机舱位置计算机舱目标位置;
24、通过偏航系统将机舱偏航到目标位置。
25、进一步,所述通过偏航驱动单元将机舱偏航到目标位置,还包括,在偏航过程中plc对机舱偏航实时位置与目标位置进行对比,并及时下发偏航修正指令,直到机舱位置到达目标位置时停止偏航,形成位置闭环控制。
26、由上述技术方案可知,本发明的有益效果:本发明提供一种风力发电机组机舱位置测控系统及方法。系统包括:机舱位置测量单元,包括凸轮开关组和双通道位置计数器,凸轮开关组用于触发解缆,双通道位置计数器包括两个角度传感器,用于精确可靠测量机舱角度位置;测风单元,包括一套机械式风速风向仪和一套超声波风速风向仪,用于给机组提供精确可靠的风向风速信息;偏航驱动单元,用于与plc模块网口通信接收偏航指令,并驱动机舱进行偏航动作;主控单元,所述主控单元包括电源模块和plc模块,所述plc模块用于接收机舱位置测量单元和测风单元的模拟信号以及限位数字信号,同时与偏航驱动单元进行通信,plc模块通过网口通信下发偏航指令;电源单元,所述电源单元用于给主控单元、机舱位置测量单元、测风单元以及偏航驱动单元提供电源。方法是通过双通道测量和位置闭环控制,实现机组偏航测控功能的冗余保护,同时,高精度测量灵敏度高,闭环位置控制准确性好,使机组机舱位置的测控功能具有更高的灵敏性、准确性和可靠性。机舱位置测控系统及方法冗余了一个精度更高的机舱位置测量系统和闭环位置控制方法,显著提升风力发电机组的可利用率。
技术特征:
1.一种风力发电机组机舱位置测控系统,其特征在于:包括,
2.根据权利要求1所述的风力发电机组机舱位置测控系统,其特征在于,所述双通道位置计数器包括角度传感器a和角度传感器b,所述角度传感器a和所述角度传感器b为不同精度的计数。
3.根据权利要求1所述的风力发电机组机舱位置测控系统,其特征在于,所述偏航驱动单元包括偏航变频器、滤波电流以及偏航电机,所述偏航变频器用于与plc进行网口通信,并执行偏航指令驱动偏航电机进行机舱偏航。
4.根据权利要求1所述的风力发电机组机舱位置测控系统,其特征在于,所述plc模块包括ai模块、di模块以及网口通信模块,所述ai模块用于接收机舱位置测量单元和测风单元的4~20ma模拟信号,所述di模块用于接收机舱位置测量单元的限位数字信号,所述网口通信模块用于与偏航变频器进行通信。
5.根据权利要求1所述的风力发电机组机舱位置测控系统,其特征在于,电源单元向偏航驱动单元提供交流400v电源,所述电源单元向主控单元提供230v交流电源。
6.根据权利要求2所述的风力发电机组机舱位置测控系统,其特征在于,所述角度传感器a和角度传感器b分别通过蜗齿轮和小圆锥齿轮在同一个蜗杆的驱动下转动,且角度传感器a和角度传感器b的零点相同。
7.一种风力发电机组机舱位置测控方法,其特征在于,包括如下步骤:
8.根据权利要求7所述的风力发电机组机舱位置测控方法,其特征在于,判断角度传感器a或角度传感器b的数据是否正常,包括若角度传感器a或角度传感器b的数据平稳无跳变则其数据正常。
9.根据权利要求7所述的风力发电机组机舱位置测控方法,其特征在于,获得当前机舱角度位置数据后,还包括如下步骤:
10.根据权利要求9所述的风力发电机组机舱位置测控方法,其特征在于,所述通过偏航驱动单元将机舱偏航到目标位置,还包括,在偏航过程中plc对机舱偏航实时位置与目标位置进行对比,并及时下发偏航修正指令,直到机舱位置到达目标位置时停止偏航,形成位置闭环控制。
技术总结
本发明提供一种风力发电机组机舱位置测控系统及方法,系统主要包括:机舱位置测量单元,其双通道位置计数器用于精确可靠测量机舱角度位置;测风单元,用于精确可靠测量风向风速信息;偏航驱动单元,用于接收偏航指令并驱动机舱进行偏航;主控单元,所述主控单元包括电源模块和PLC模块,所述PLC模块用于接收机舱位置测量单元和测风单元的模拟信号以及限位数字信号,同时与偏航驱动单元进行通信;还包括电源单元等。方法是通过双通道测量和位置闭环控制,实现机组偏航测控功能的冗余控制,同时,高精度测量灵敏度高,位置闭环控制准确性好,使机组机舱位置的测控功能具有更高的灵敏性、准确性和可靠性,从而显著提升风力发电机组的可利用率。
技术研发人员:王灿,冉军,张朝远,陶建权,杨静,胡海波,汪俊成,罗鹏
受保护的技术使用者:中船海装风电有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!