变桨系统的驱动器控制装置及控制方法与流程
本发明涉及变桨系统控制,特别涉及一种变桨系统的驱动器控制装置及控制方法。
背景技术:
1、变桨系统是风力发电机的重要组成部分,其需要准确执行主控位置指令,来控制风轮的转速,进而控制风机的输出功率,并能够通过空气制动的方式使风机安全停机。一般来说,三叶片机型的风力发电机组的三个叶片以120度的角度差均匀分布在风轮的旋转平面上。叶片在旋转过程中会在重力、风载等影响下拖动变桨电机。
2、ipc(individual pitch control,ipc)(独立变桨)是近些年来在风力发电变桨控制中采用较多的技术。在ipc使用的情况下,每个轴叶片在风轮旋转过程中都会不断地进行调桨动作,其频率与风轮转速密切相关。近些年来,由于行业的发展,叶片越来越长,越来越重,加上不断地调桨就导致了叶片在每转一圈的过程中,始终会在某些固定的风轮方位角下极易拖动变桨电机,使得变桨电机进入2,4象限运行,即发电状态运行。而现有的变桨系统拓扑是由三个驱动器分别控制三个变桨电机,带动三个叶片执行主控的变桨指令,其中三个驱动器的母线在电气上均各自独立。在当前的变桨驱动器的拓扑中,变桨电机的发电能量会回馈到该轴驱动器的母线上,并抬升母线电压,当母线电压升高到一定值后,须通过导通泄放回路的开关,将能量泄放到制动电阻上,否则母线会被过压击穿而损坏驱动器。当变桨电机发电的能量被制动电阻消耗的同时,制动电阻将发热;如果不断的有发电能量进入,那么制动电阻将不断地发热;如果该制动电阻不断发热后所达到热平衡的温度过高,则制动电阻将烧毁。制动电阻烧毁后,将导致驱动器过压烧毁、卡桨等一系列问题。另外,现有的驱动器只有电动功能,而没有将能量回馈到电网的功能,当三个驱动器母线中任一驱动器母线出现故障时,会影响其它驱动器正常收桨。
技术实现思路
1、本发明要解决的技术问题包括,克服现有技术中独立变桨时,驱动器母线出现泵升而导致驱动器被损坏的缺陷,提供一种变桨系统的驱动器控制装置及控制方法。
2、本发明是通过下述技术方案来解决上述技术问题:
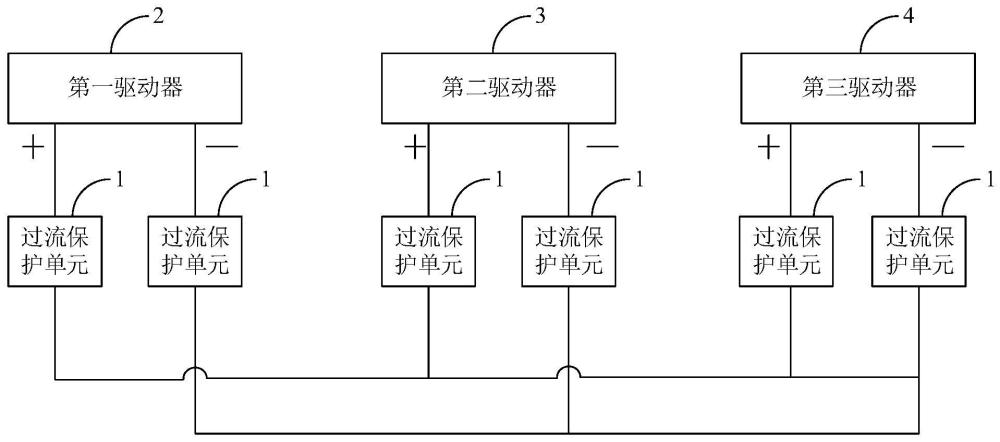
3、本发明第一方面提供了一种变桨系统的驱动器控制装置,所述驱动器控制装置包括驱动器和过流保护单元;所述驱动器的数目为多个,各驱动器母线通过所述过流保护单元并联;
4、所述过流保护单元用于断开故障驱动器母线与其它驱动器母线的连接。
5、较佳地,每一驱动器母线正极分别连接有一过流保护单元,且各驱动器母线正极连接的各过流保单元之间相互并联;每一驱动器母线负极分别连接有一过流保护单元,且各驱动器母线负极连接的各过流保单元之间相互并联。
6、较佳地,所述过流保护单元包括电流检测模块;
7、所述电流检测模块用于检测流经所述过流保护单元连接到的驱动器母线正负极的实时电流值,所述过流保护单元被配置为将所述实时电流值与预设电流值进行比较。
8、较佳地,所述过流保护单元还包括半导体开关模块;
9、所述半导体开关模块被配置为:
10、在流经所述过流保护单元连接到的驱动器母线正负极的实时电流值大于所述预设电流值时,处于关断状态,且,在流经所述过流保护单元连接到的驱动器母线正负极的实时电流值小于或等于所述预设电流值时,处于导通状态。
11、较佳地,所述过流保护单元还包括供电模块;
12、所述供电模块用于给所述过流保护单元供电。
13、较佳地,所述过流保护单元还用于在断开故障驱动器母线与其它驱动器母线的连接的同时断开所述变桨系统的安全链。
14、本发明第二方面提供了一种变桨系统的驱动器控制方法,所述驱动器控制方法应用于第一方面所述的变桨系统的驱动器控制装置,所述驱动器控制方法包括:
15、检测流经所述过流保护单元连接到的驱动器母线正负极的实时电流值;
16、在所述实时电流值大于预设电流值时,断开所述该驱动器母线与其它驱动器母线的连接。
17、较佳地,所述驱动器控制方法还包括:
18、在流经所述过流保护单元连接到的驱动器母线正负极的实时电流值小于或等于所述预设电流值时,控制半导体开关模块处于导通状态。
19、较佳地,所述驱动器控制方法还包括:
20、控制正常的驱动器收桨至目标位置。
21、在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本发明各较佳实例。
22、本发明的积极进步效果在于:
23、本发明将多个驱动器母线通过过流保护单元并联,有效降低了独立变桨时,驱动器母线出现泵升而导致驱动器被损坏的几率;并通过过流保护单元断开出现故障的驱动器母线与其它驱动器母线的连接,实现了对驱动器的过流保护,避免了任意一个驱动器出现故障而影响其它驱动器的收桨操作,保证了变桨系统的安全性。
技术特征:
1.一种变桨系统的驱动器控制装置,其特征在于,所述驱动器控制装置包括驱动器和过流保护单元;所述驱动器的数目为多个,各驱动器母线通过所述过流保护单元并联;
2.如权利要求1所述的变桨系统的驱动器控制装置,其特征在于,每一驱动器母线正极分别连接有一过流保护单元,且各驱动器母线正极连接的各过流保单元之间相互并联;每一驱动器母线负极分别连接有一过流保护单元,且各驱动器母线负极连接的各过流保单元之间相互并联。
3.如权利要求1所述的变桨系统的驱动器控制装置,其特征在于,所述过流保护单元包括电流检测模块;
4.如权利要求3所述的变桨系统的驱动器控制装置,其特征在于,所述过流保护单元还包括半导体开关模块;
5.如权利要求1所述的变桨系统的驱动器控制装置,其特征在于,所述过流保护单元还包括供电模块;
6.如权利要求1所述的变桨系统的驱动器控制装置,其特征在于,所述过流保护单元还用于在断开故障驱动器母线与其它驱动器母线的连接的同时断开所述变桨系统的安全链。
7.一种变桨系统的驱动器控制方法,所述驱动器控制方法应用于权利要求1-6中任意一项所述的变桨系统的驱动器控制装置,其特征在于,所述驱动器控制方法包括:
8.如权利要求7所述的变桨系统的驱动器控制方法,其特征在于,所述驱动器控制方法还包括:
9.如权利要求7所述的变桨系统的驱动器控制方法,其特征在于,所述驱动器控制方法还包括:
技术总结
本发明公开了一种变桨系统的驱动器控制装置及控制方法,驱动器控制装置包括驱动器和过流保护单元;驱动器的数目为多个,各驱动器母线通过过流保护单元并联;过流保护单元用于断开故障驱动器母线与其它驱动器母线之间的连接。本发明通过过流保护单元断开出现故障的驱动器母线,实现了对驱动器的过流保护,避免了任意一个驱动器出现故障而影响其它驱动器的收桨操作,保证了变桨系统的安全性。
技术研发人员:李灿,贾惠文,寻征轩,吕峰,严博涛
受保护的技术使用者:上海电气风电集团股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!