一种矿用智能钻孔卸压装置
1.本实用新型涉及一种矿用智能钻孔卸压装置,属于煤矿开采设备技术领域。
背景技术:
2.煤炭作为我国的主体能源,在国民经济中占有重要的战略地位。未来几十年内,以煤炭为主的能源结构难以改变。随着煤炭开采程度的加剧,浅部资源渐趋枯竭,煤炭开发加速向深部、复杂地质条件转移,出现了千米深井高地应力巷道、极破碎围岩巷道、特大断面巷道、强烈采动影响巷道及沿空留巷等复杂困难巷道。鉴于地质条件越来越复杂,地压的不稳定性逐渐提高,如何保持稳定的巷道压力,预防冲击地压成为一个突出问题。
3.钻孔卸压是利用钻孔消除或减缓冲击地压的解危措施,此法基于施工钻屑法钻孔时产生的钻孔冲击现象。越钻进感应力带,钻孔冲击频度越高,强度越大,钻孔冲击时煤粉量显著增多。因此,每一个钻孔会形成一定的破碎区,当这些破碎区互相接近后,能使煤层破裂卸压。
4.现在的钻孔卸压工作主要依靠人力或者人为操纵机器进入巷道钻孔,劳动强度大,且具有较大的安全隐患。
5.中国专利文件cn109898994a公开了一种煤层卸压方法,采用钻机在煤层上进行钻孔,获取卸压串联通道,卸压串联通道的末端进行扩孔,获取第一卸压空间,沿着所述卸压串联通道的轴线,在距离所述第一卸压空间中心第一距离处进行扩孔,获取第二卸压空间,同时本实用新型还公开了用于执行煤层卸压方法的卸压装置。该装置采用人为操纵钻机钻孔操作,劳动强度大,工作时间长。
6.中国专利文件cn209179794u公开了了一种全液压煤矿井下巷道锚杆钻孔装置,包括装置主体,所述装置主体的下端设置有升降液压伸缩杆,所述升降液压伸缩杆的下端设置有连接板,所述连接板的上端外表面的升降液压伸缩杆的一侧贯穿设置有固定螺纹孔,所述固定螺纹孔的内侧贯穿设置有承重螺纹柱,所述承重螺纹柱的上端设置有转动盘,所述转动盘的一侧设置有防滑块,所述承重螺纹柱的下端设置有固定板,所述连接板的下端的承重螺纹柱的一侧设置有承重万向轮。该装置采用人工操作进行高度调节后钻孔,智能程度较低,无法避免人员井下操作可能带来的风险。
7.有鉴于此,设计一种智能化、自动化、高效化的钻孔卸压装置是十分有必要的,可以有效降低卸压工作量,同时方便施工,提高施工速度,不影响施工工期。
技术实现要素:
8.针对现有技术的不足,本实用新型提供一种矿用智能钻孔卸压装置,可以有效降低卸压工作量,同时方便施工,提高施工速度,不影响施工工期。
9.本实用新型的技术方案如下:
10.一种矿用智能钻孔卸压装置,包括机身支架、控制系统、识别感应系统和钻孔系统,其中,机身支架前端通过万向轮支架连接设置万向轮,机身支架后端两侧分别设置主动
轮,机身支架上设置识别感应系统,识别感应系统感应巷道内环境,机身支架前端设置钻孔系统,机身支架后端设置控制系统,主动轮和识别感应系统均连接至控制系统,控制系统控制装置整体作业。
11.优选的,钻孔系统包括钻头、钻孔电机、伸缩式液压缸、连杆、固定支架、摆动支架、二级液压伸缩杆和三级液压伸缩杆,其中,
12.固定支架固定于机身支架前端两侧,摆动支架活动设置于固定支架上端,摆动支架为c型架,摆动支架连接至伸缩式液压缸,伸缩式液压缸上连接钻孔电机,钻孔电机通过钻头夹夹紧钻头,伸缩式液压缸与钻孔电机置于一壳体中;
13.2个固定支架的中间位置设置三级液压伸缩杆,三级液压伸缩杆通过连杆连接至壳体,壳体中部通过二级液压伸缩杆活动连接至固定支架底端,通过二级液压伸缩杆的伸缩调节钻孔电机高度,通过三级液压伸缩杆的伸缩调节使钻孔电机保持水平位置。
14.进一步优选的,固定支架底端设置活动齿轮,二级液压伸缩杆通过活动齿轮连接至固定支架底端,通过活动齿轮使二级液压伸缩杆与固定支架活动连接。
15.优选的,识别感应系统包括第一测距传感器、第二测距传感器和变形传感器,机身支架前端设置传感器支架,传感器支架两侧分别设置第一测距传感器,机身支架前端和后端分别对称第二测距传感器,机身支架上部设置变形传感器支架,变形传感器支架上设置变形传感器,变形传感器为长方体,长方体的上部、左侧和右侧分别设置变形扫描仪。
16.进一步优选的,传感器支架中部设置3个灰度传感器,巷道内有路径可寻时,灰度传感器能识别有色路线或轨道,提高装置运行速度,进而提高整个装置的工作效率,巷道内无路径可寻时,灰度传感器停止工作,通过两侧的测距传感器设定装置与两侧巷帮的距离,然后装置按设定距离在巷道内行走。
17.优选的,变形传感器的上部、左侧和右侧分别设置照明灯,保证变形扫描仪能够一直扫描到整个巷道的变形情况。
18.优选的,机身支架四角设置液压支撑装置,装置到达指定地点时,液压支撑装置放下液压杆,撑到底板,起到避免机身倾斜,保持装置平衡的作用,同时还能减小装置对底板的压强,避免了装置对底板造成破坏。
19.优选的,控制系统包括控制器和电池,控制器部选用松下可编程控制器afpxhc60t,电池连接至控制器,控制器外设置外壳,控制器连接二级液压伸缩杆、三级液压伸缩杆、伸缩式液压缸、第一测距传感器、第二测距传感器、变形传感器和液压支撑装置。
20.进一步优选的,机身支架上设置遥控接收器,遥控接收器连接至控制器,当遥控接收器接收到返回命令时,控制装置返回。
21.优选的,控制器和电池分别设置散热器,散热器使用离心风扇,为控制器和电池降温,保证工作性能。
22.优选的,万向轮和主动轮后的机身支架上均设置挡板,防止巷道内积水溅到车身,影响工作性能。
23.优选的,控制器设置巡航速度为1m/s,设置每完成一次钻孔,装置调整到前进方向,开始行走并达到正常巡航速度1m/s后,间隔1秒再次启动变形传感器,保证两个钻孔之间间隔距离大于1米,避免短距离内重复多次钻孔作业,降低工作效率。
24.一种矿用智能钻孔卸压装置的使用方法,操作步骤如下:
25.(1)启动控制系统,第一测距传感器监测巷道两侧宽度,第二测距传感器监测前方是否有障碍,前方无障碍且巷道宽度大于装置整体宽度时,装置启动运行;
26.(2)变形传感器上的变形扫描仪实时扫描监测巷道上部和两侧的变形情况,根据巷道未变形前的形状测量出的上部面积、左侧面积、右侧面积分别记为s0、s1、s2并输入到控制器中,变形扫描仪实时监测到巷道变形后的上部面积、左侧面积、右侧面积分别记为s0’
、s1’
、s2’
,当{[(s0+s1+s2)
‑
(s0’
+s1’
+s2’
)]/s0+s1+s2}
×
100%≥10%时,装置停止运动;
[0027]
(3)s1’
‑
s1>s2’
‑
s2时装置向左转弯,s1’
‑
s1≤s2’
‑
s2时,装置向右转弯,钻机调整至指定高度并水平放置后,测距传感器检测装置与巷帮的距离,若距离超过1m,装置以0.1m/s的速度缓慢移动至巷帮1m处停下,液压支撑装置放下液压杆,钻头距巷帮0.3m;
[0028]
(4)钻孔电机启动,钻头正转,伸缩式液压缸缓慢推动钻孔电机伸展,为钻孔提供轴向力,通过巷道内的监控设备实时监测钻孔电机伸出的长度,钻孔电机伸出长度达到设定值时,钻孔电机停转,静止3秒后,钻头反转,伸缩式液压缸收回钻孔电机,使钻头顺利退出;
[0029]
(5)钻孔电机恢复至原位,液压支撑装置收起,装置转回原位置继续前行,变形扫描仪监测到的数据满足工作条件时,重复步骤(3)(4)。
[0030]
本实用新型的有益效果在于:
[0031]
1、本实用新型全程通过控制系统进行自动化控制,有效降低卸压工作量,同时方便施工,提高施工速度,不影响施工工期。
[0032]
2、本实用新型在地面远程监控操作,没有人员直接参与,避免了冲击地压时产生危险造成人员损伤的情况,提高了安全系数。
[0033]
3、本实用新型通过调整钻孔电机高度和角度,达到精确钻孔的目的,实现无人智能化钻孔卸压。
附图说明
[0034]
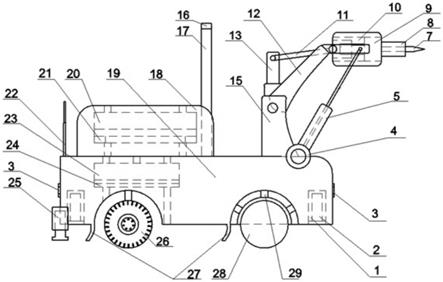
图1为本实用新型的结构主视图;
[0035]
图2为本实用新型的结构左视图;
[0036]
图3为本实用新型的结构俯视图;
[0037]
图4为本实用新型的第一测距传感器和第二测距传感器位置分布图;
[0038]
图5为本实用新型的第一测距传感器和第二测距传感器正视图;
[0039]
图6为本实用新型的钻孔电机连接结构俯视图;
[0040]
图7为本实用新型的钻孔电机连接结构后视图;
[0041]
图8为本实用新型的变形传感器结构左视图;
[0042]
图9为本实用新型的变形传感器结构俯视图;
[0043]
图10为本实用新型的自动巡航路线图;
[0044]
图11为本实用新型的自动巡航路线图;
[0045]
图12为本实用新型的自动巡航路线图;
[0046]
图13为本实用新型的自动巡航左转弯示意图;
[0047]
图14为本实用新型的自动巡航右转弯示意图;
[0048]
其中:1、传感器支架;2、第一测距传感器;3、第二测距传感器;4、活动齿轮;5、二级
液压伸缩杆;6、灰度传感器;7、钻头;8、钻头夹;9、钻孔电机;10、伸缩式液压缸;11、连杆;12、摆动支架;13、三级液压伸缩杆;14、照明灯;15、固定支架;16、变形传感器;17、变形传感器支架;18、外壳;19、机身支架;20、控制器;21、散热器;22、遥控接收器;23、电池;24、散热器;25、液压支撑装置;26、主动轮;27、挡板;28、万向轮;29、万向轮支架;30、变形扫描仪。
具体实施方式
[0049]
下面通过实施例并结合附图对本实用新型做进一步说明,但不限于此。
[0050]
实施例1:
[0051]
如图1
‑
9所示,本实施例提供一种矿用智能钻孔卸压装置,包括机身支架19、控制系统、识别感应系统和钻孔系统,其中,机身支架19前端通过万向轮支架29连接设置万向轮28,机身支架后端两侧分别设置主动轮26,机身支架上设置识别感应系统,识别感应系统感应巷道内环境,机身支架前端设置钻孔系统,机身支架后端设置控制系统,主动轮和识别感应系统均连接至控制系统,控制系统控制装置整体作业。主动轮包括可调速电机,由可调速电机带动主动轮运动,可调速电机连接至控制系统并由控制系统调速。
[0052]
钻孔系统包括钻头7、钻孔电机9、伸缩式液压缸10、连杆11、固定支架15、摆动支架12、二级液压伸缩杆5和三级液压伸缩杆13,伸缩式液压缸是可以得到较长工作行程的具有多级套筒形活塞杆的液压缸,钻孔电机采用市场上功率在1200w
‑
1800w的风冷式电机,其中,
[0053]
固定支架15固定于机身支架前端两侧,摆动支架12活动设置于固定支架上端,摆动支架12为c型架,摆动支架12连接至伸缩式液压缸10,伸缩式液压缸10上连接钻孔电机9,钻孔电机9通过钻头夹8夹紧钻头7,伸缩式液压缸10与钻孔电机9置于一壳体中;
[0054]
2个固定支架的中间位置设置三级液压伸缩杆13,三级液压伸缩杆13通过连杆11连接至壳体,壳体中部通过二级液压伸缩杆5活动连接至固定支架15底端,通过二级液压伸缩杆的伸缩调节钻孔电机高度,通过三级液压伸缩杆13的伸缩调节使钻孔电机保持水平位置。
[0055]
识别感应系统包括第一测距传感器2、第二测距传感器3和变形传感器16,机身支架19前端设置传感器支架1,传感器支架1两侧分别设置第一测距传感器2,机身支架19前端和后端分别对称第二测距传感器3,机身支架19上部设置变形传感器支架17,变形传感器支架17上设置变形传感器16,变形传感器16为长方体,长方体的上部、左侧和右侧分别设置变形扫描仪30。
[0056]
传感器支架1中部设置3个灰度传感器6,巷道内有路径可寻时,灰度传感器能识别有色路线或轨道,提高装置运行速度,进而提高整个装置的工作效率,巷道内无路径可寻时,灰度传感器停止工作,通过两侧的测距传感器设定装置与两侧巷帮的距离,然后装置按设定距离在巷道内行走。
[0057]
机身支架19四角设置液压支撑装置25,装置到达指定地点时,液压支撑装置25放下液压杆,撑到底板,起到避免机身倾斜,保持装置平衡的作用,同时还能减小装置对底板的压强,避免了装置对底板造成破坏。
[0058]
控制系统包括控制器20和电池23,控制器部选用松下可编程控制器afpxhc60t,电池连接至控制器,控制系统配备2
‑
3套电池组,一组使用,剩余备用,保证装置整体的电池供
应,控制器外设置外壳18,控制器连接二级液压伸缩杆、三级液压伸缩杆、伸缩式液压缸、第一测距传感器、第二测距传感器、变形传感器和液压支撑装置。
[0059]
控制器设置巡航速度为1m/s,设置每完成一次钻孔,装置调整到前进方向,开始行走并达到正常巡航速度1m/s后,间隔1秒再次启动变形传感器,保证两个钻孔之间间隔距离大于1米,避免短距离内重复多次钻孔作业,降低工作效率。
[0060]
一种矿用智能钻孔卸压装置的使用方法,操作步骤如下:
[0061]
(1)启动控制系统,第一测距传感器监测巷道两侧宽度,第二测距传感器监测前方是否有障碍,前方无障碍且巷道宽度大于装置整体宽度时,装置启动运行;
[0062]
(2)变形传感器上的变形扫描仪实时扫描监测巷道上部和两侧的变形情况,根据巷道未变形前的形状测量出的上部面积、左侧面积、右侧面积分别记为s0、s1、s2并输入到控制器中,变形扫描仪实时监测到巷道变形后的上部面积、左侧面积、右侧面积分别记为s0’
、s1’
、s2’
,当{[(s0+s1+s2)
‑
(s0’
+s1’
+s2’
)]/s0+s1+s2}
×
100%≥10%时,装置停止运动;
[0063]
(3)s1’
‑
s1>s2’
‑
s2时装置向左转弯,s1’
‑
s1≤s2’
‑
s2时,装置向右转弯,钻机调整至指定高度并水平放置后,测距传感器检测装置与巷帮的距离,若距离超过1m,装置以0.1m/s的速度缓慢移动至巷帮1m处停下,液压支撑装置放下液压杆,钻头距巷帮0.3m;
[0064]
(4)钻孔电机启动,钻头正转,伸缩式液压缸缓慢推动钻孔电机伸展,为钻孔提供轴向力,通过巷道内的监控设备实时监测钻孔电机伸出的长度,钻孔电机伸出长度达到设定值时,钻孔电机停转,静止3秒后,钻头反转,伸缩式液压缸收回钻孔电机,使钻头顺利退出。
[0065]
(5)钻孔电机恢复至原位,液压支撑装置收起,装置转回原位置继续前行,变形扫描仪监测到的数据满足工作条件时,重复步骤(3)(4)。
[0066]
装置在行进时,沿巷道一直行进,若检测到路口,测距传感器检测到左右两侧距离都变大,可进行转弯时默认为左转弯,如图13所示,当装置行进至巷道末端或第二测距传感器传感器3检测到前方有障碍物时,装置从右方向调头,如图14所示,继续行进,去往别处,装置的自动巡航路线如图10
‑
12所示。
[0067]
实施例2:
[0068]
一种矿用智能钻孔卸压装置,结构如实施例1所示,不同之处在于,固定支架15底端设置活动齿轮4,二级液压伸缩杆5通过活动齿轮4连接至固定支架15底端,通过活动齿轮4使二级液压伸缩杆5与固定支架15活动连接。通过活动齿轮来调节二级液压伸缩杆的前后摆动,活动齿轮由液压马达控制,液压马达通过电机驱动的液压泵带动,电机连接至控制系统。
[0069]
实施例3:
[0070]
一种矿用智能钻孔卸压装置,结构如实施例1所示,不同之处在于,变形传感器16的上部、左侧和右侧分别设置照明灯14,保证变形扫描仪30能够一直扫描到整个巷道的变形情况。
[0071]
实施例4:
[0072]
一种矿用智能钻孔卸压装置,结构如实施例1所示,不同之处在于,机身支架19上设置遥控接收器22,遥控接收器22连接至控制器20,当遥控接收器22接收到返回命令时,控制装置返回。
[0073]
实施例5:
[0074]
一种矿用智能钻孔卸压装置,结构如实施例1所示,不同之处在于,控制器20上设置散热器21,电池上设置散热器24,散热器使用离心风扇,为控制器和电池降温,保证工作性能。万向轮和主动轮后的机身支架上均设置挡板27,防止巷道内积水溅到车身,影响工作性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1