用于井下节流器的双驱动多级可变流量调节机构的制作方法
1.本发明属于石油、天然气资源的井下节流集采技术领域,尤其涉及用于井下节流器的双驱动多级可变流量调节机构。
背景技术:
2.在油气田开发过程中,井下节流工艺技术是“低成本开发”的关键技术之一,通过井下节流器的节流作用形成了井口不加热、不注醇、井间串联、中低压集采、常温分离、二级增压、集中处理等一系列中低压集输工艺技术,可以实现油气田经济规模有效开发。
3.但是随着开采时间的推移以及井下环境的变化,常规井下节流器节流流量固定,无法满足后期开采要求,需要被打捞出井筒,这会带来较高的施工风险与成本,为了解决这个问题,研发出了可以通过收集井下工况、无需打捞便可自动调节流量的智能节流器。
4.现有的智能井下节流器仅能通过电机驱动调节机构改变节流流量,电路系统长时间在井下复杂环境中工作会降低供电与电控系统稳定性,一旦系统损坏,节流器便失去调节能力,因此需要一种更可靠的流量调节机构解决当前的技术问题。
5.针对以上问题,有必要研究一种能拥有更长的井下使用寿命,避免打捞与重新下入过程中带来的风险与经济损失的用于井下节流器的双驱动多级可变流量调节机构。
技术实现要素:
6.本发明的目的在于克服现有技术的不足,提供一种能拥有更长的井下使用寿命,避免打捞与重新下入过程中带来的风险与经济损失的用于井下节流器的双驱动多级可变流量调节机构。
7.本发明解决其技术问题是采取以下技术方案实现的:
8.用于井下节流器的双驱动多级可变流量调节机构,包括壳体,所述壳体内壁安装锥形套,所述锥形套上方的壳体内安装离合套,所述离合套下端形成分瓣弹性爪结构,所述离合套外壁上形成凸台结构,所述离合套上套设弹簧,所述弹簧两端被凸台结构、锥形套限位,所述离合套侧壁上设有若干过流孔,所述壳体内壁上还固定安装定位导轨套与换向导轨套,所述换向导轨套上环向设有若干换向槽,所述定位导轨套上环向设有若干定位槽,所述定位槽的深度循环加深,所述离合套侧壁上安装导向键;
9.在初始位置,所述过流孔被密封,节流器处于关闭状态;当所述离合套下行压缩弹簧至锥形套,并上行时导向键会顺序循环插入到定位导轨套不同深度的定位槽中,使得过流孔解除密封的个数依次增加,井下流体通过节流孔实现流通,从而实现多级可变流量调节。
10.进一步的,还包括自动调节机构,所述自动调节机构安装在所述壳体内部,所述自动调节机构能驱动所述离合套多次下行压缩弹簧,且离合套上行时导向键会顺序循环插入到定位导轨套不同深度的定位槽中,使得过流孔解除密封的个数依次增加,井下流体通过节流孔实现流通,从而实现多级可变流量调节。
11.进一步的,所述自动调节机构包括电机、丝杠、运动杆,所述电机的输出端连接丝杠,所述丝杠与所述运动杆一端螺纹连接,所述运动杆穿过所述锥形套,且运动杆另一端固定连接传力帽,所述传力帽与离合套的分瓣弹性爪结构配合连接,所述电机驱动丝杠转动时,所述运动杆被限位沿所述壳体轴向移动,从而带动所述离合套下行压缩弹簧。
12.进一步的,所述传力帽上部形成锥台结构,使得所述电机带动所述运动杆上行时,所述传力帽能够进入所述离合套的分瓣弹性爪结构内。
13.进一步的,所述离合套内壁上固定安装节流帽,所述节流帽为底部开口的帽形结构,所述节流帽侧壁上设有与所述过流孔配合的过液通道。
14.进一步的,所述壳体与离合套之间形成密封面,且在初始位置,所述过流孔位于所述密封面下方,使得井下流体不能通过过流孔与所述壳体顶部连通,节流器处于关闭状态。
15.进一步的,还包括扭力传感器,所述扭力传感器的两端均通过弹性联轴器分别与电机、丝杠连接。
16.进一步的,所述运动杆外侧壁上固定安装防转键,所述壳体内壁上轴向设有与所述防转键配合的滑道。
17.进一步的,还包括壳体压帽,所述壳体压帽安装在所述壳体的一端,打捞杆穿过所述壳体压帽与所述离合套固定连接。
18.进一步的,所述壳体压帽上设有若干过液孔。
19.本发明的优点和积极效果是:
20.本发明可以实现井下改变节流流量,无需将节流器打捞出井筒,可以降低施工风险、节约施工成本;本发明的流量调节机构拥有双驱动模式,可以自动调节机构改变流量,也可以通过外部机械力改变流量,可靠性更佳,使用寿命更长,并且可循环更替变挡,这种机械式的调节方式容错性更强、在电控系统老化失准后仍可保持高稳定的工作状态,更适合在井下复杂工况下工作。
附图说明
21.以下将结合附图和实施例来对本发明的技术方案作进一步的详细描述,但是应当知道,这些附图仅是为解释目的而设计的,因此不作为本发明范围的限定。此外,除非特别指出,这些附图仅意在概念性地说明此处描述的结构构造,而不必要依比例进行绘制。
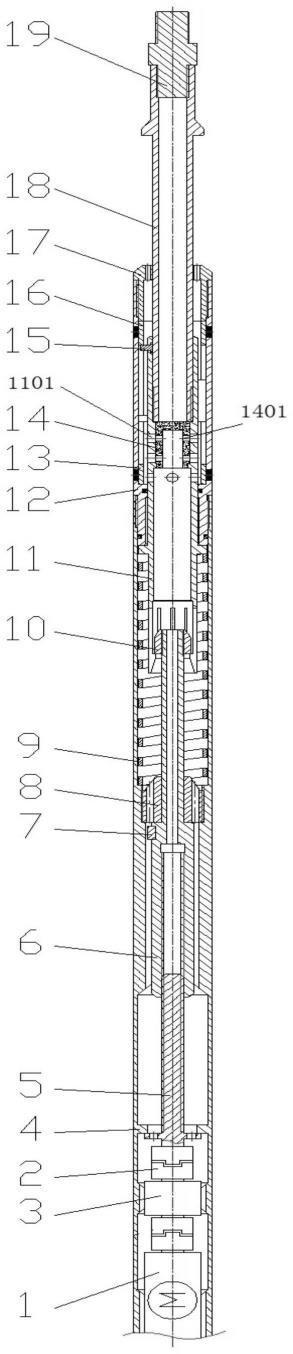
22.图1为本发明实施例提供的用于井下节流器的双驱动多级可变流量调节机构的结构剖面图;
23.图2为本发明实施例提供的用于井下节流器的双驱动多级可变流量调节机构的定位导轨套与换向导轨套安装时的结构剖面图;
具体实施方式
24.首先,需要说明的是,以下将以示例方式来具体说明本发明的具体结构、特点和优点等,然而所有的描述仅是用来进行说明的,而不应将其理解为对本发明形成任何限制。此外,在本文所提及各实施例中予以描述或隐含的任意单个技术特征,仍然可在这些技术特征(或其等同物)之间继续进行任意组合或删减,从而获得可能未在本文中直接提及的本发明的更多其他实施例。
25.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
26.如图1-2所示,本发明提供了用于井下节流器的双驱动多级可变流量调节机构,包括壳体,所述壳体内壁安装锥形套8,所述锥形套8上方的壳体内安装离合套11,所述离合套11下端形成分瓣弹性爪结构,所述离合套11外壁上形成凸台结构,所述离合套11上套设矩形弹簧9,所述弹簧9两端被凸台结构、锥形套8限位,所述离合套11侧壁上设有若干过流孔1101,所述壳体内壁上还固定安装定位导轨套16与换向导轨套13,所述换向导轨套13上环向设有若干换向槽,所述定位导轨套16上环向设有若干定位槽,所述定位槽的深度循环加深,所述离合套11侧壁上安装导向键15;
27.在初始位置,所述过流孔被密封,节流器处于关闭状态;当所述离合套11下行压缩弹簧至锥形套8,并上行时导向键15会顺序循环插入到定位导轨套16不同深度的定位槽中,使得过流孔解除密封的个数依次增加,井下流体通过节流孔实现流通,从而实现多级可变流量调节。
28.在本实施例中,还可以考虑:还包括自动调节机构,所述自动调节机构安装在所述壳体内部,所述自动调节机构能驱动所述离合套11多次下行压缩弹簧,且离合套11上行时导向键15会顺序循环插入到定位导轨套16不同深度的定位槽中,使得过流孔解除密封的个数依次增加,井下流体通过节流孔实现流通,从而实现多级可变流量调节;具体的,所述自动调节机构包括电机1、丝杠5、运动杆6,所述电机1的输出端连接丝杠5,所述丝杠5与所述运动杆6一端螺纹连接,所述运动杆6穿过所述锥形套8,且运动杆6另一端固定连接传力帽10,所述传力帽10与离合套11的分瓣弹性爪结构配合连接,所述运动杆6外侧壁上固定安装防转键7,所述壳体内壁上轴向设有与所述防转键7配合的滑道,所述电机1驱动丝杠5转动时,所述运动杆6被限位沿所述壳体轴向移动,从而带动所述离合套11下行压缩弹簧。
29.所述传力帽10上部形成锥台结构,使得所述电机1带动所述运动杆6上行时,所述传力帽10能够进入所述离合套11的分瓣弹性爪结构内。
30.所述离合套11内壁上固定安装节流帽14,所述节流帽为底部开口的帽形结构,所述节流帽侧壁上设有与所述过流孔配合的过液通道1401;所述壳体与离合套11之间通过密封圈形成密封面,且在初始位置,所述过流孔位于所述密封面下方,使得井下流体不能通过过流孔与所述壳体顶部连通,节流器处于关闭状态。
31.还包括扭力传感器3,所述扭力传感器3的两端均通过弹性联轴器2分别与电机1、丝杠5连接。
32.还包括壳体压帽17,所述壳体压帽17安装在所述壳体的一端,打捞杆18穿过所述壳体压帽17与所述离合套11固定连接;所述壳体压帽17上设有若干过液孔。
33.并且,在本实施例中,所述壳体包括外壳4及连接壳12,外壳4及连接壳12通过螺纹及密封圈密封固定连接。
34.本发明的用于井下节流器的双驱动多级可变流量调节机构的安装过程为:扭力传感器3固定在外壳4内,其上下两端安装弹性联轴器2,下端弹性联轴器与电机1相连,上端弹性联轴器2连接丝杠5,丝杠5下端有盘形结构,套入外壳4内后通过盘形结构被外壳4对应位置的内缩径限位,盘形结构上均布6组过流孔,用于传导井筒底部流体,运动杆6大径位置有一凹槽可以嵌入防转键7,将嵌有防转键7的运动杆6插入进外壳4对应内缩径位置,防转键7
插入进内缩径处用于过流的滑道中,起到防止运动杆6旋转的作用,运动杆6内部有螺纹并与丝杠5上端的螺纹连接在一起,外壳4与扭力传感器3和电机1的配合面均有花型槽,起到用于过流的目的,锥形套8套入运动杆6上端并与外壳4螺接在一起,锥形套8上钻有用于过流的孔,传力帽10与运动杆6螺接在一起,将矩形弹簧装进外壳4内,离合套11下端有分瓣弹性爪结构,通过弹性爪外扩、离合套11将传力帽10包入其内,此时矩形弹簧9位于外壳4与离合套11之间位置,连接壳12内套入换向导轨套13与定位导轨套16按照图2位置关系固定好位置后,从连接壳12对应位置的工艺孔内塞焊,将换向导轨套13与定位导轨套16固定在连接壳12内,之后将连接壳12螺接在外壳4上端,将导向键15嵌入离合套11上端并且穿入进定位导轨套16的定位槽内,之后将节流帽14装入离合套11缩径限位位置,离合套11上布置有多组过流孔,与节流帽14上的过流通道位置对应,把壳体压帽17套进打捞杆18后,把打捞杆18与离合套11螺接在一起,打捞杆18下端完成对节流帽14的限位,打捞杆18外壁完成对导向键15的限位,壳体压帽17与连接壳12螺接在一起,壳体压帽17上均布用于过流的过液孔,连接壳12内外有密封圈槽,分别建立与外壳4和离合套11的密封,最后将连接头19与打捞杆18螺接在一起完成整个机构的组装。
35.当使用电机控制多级可变流量调节机构改变节流流量时:
36.电机1与扭力传感器3安装在外壳4内,扭力传感器3两端安装弹性联轴器2,下端弹性联轴器用于接收电机1输入的扭力,上端弹性联轴器用于将扭力传递给丝杠5,丝杠5与运动杆6通过梯形螺纹连接,由于运动杆6通过防转键7使其与外壳4建立了无法轴向转动的约束,所以当丝杠5转动时,与之螺纹连接的运动杆6没有跟转并且发生了进扣动作,产生了上下运动,运动杆6上端连接着传力帽10、传力帽初始位置安装于离合套11下端的分瓣弹性爪内,依靠传力帽10的下直面与分瓣弹性爪的内台阶配合,将向下的运动传递给了离合套11,离合套11与外壳4之间安装有矩形弹簧,在离合套11向下运动的过程中矩形弹簧压缩聚能,当运动杆6与传力帽10带动离合套11到达锥形套8位置时,由于离合套11下端的分瓣弹性爪下部为喇叭口形状,与锥形套8上部的锥面配合后,会将下行运动产生的轴向力导引出径向分力,使分瓣弹性爪张开,分瓣弹性爪内台阶随之外扩,使离合套11脱离传力帽10的限制,矩形弹簧回位,能量释放带动离合套11向上运动,离合套11的这种先下后上的动作过程即为流量调节工作流程;
37.承接上述动作,离合套11脱离了传力帽10后,传力帽10继续下行到限位,电机1运转受阻扭力上升,扭力传感器3将正转扭力上升信号传递给智能节流器的控制系统,控制系统会改变电机1旋转方向,电机1倒转,使运动杆6与丝杠5间脱扣上行,运动杆6连带传力帽10一并上行,由于传力帽10上端为斜面,与离合套11下端的分瓣弹性爪喇叭口形状配合后,将上行力传导至径向使分瓣弹性爪张开,传力帽10可重新插入到离合套11内与之建立联动关系,运动杆6上行到限位后,扭力传感器3会将反转扭力上升信号传递给智能节流器的控制系统,控制系统会停止电机动作,这种由电机1驱动的传力帽10先带动离合套11一并下行,之后离合套11分离,接着传力帽10上行与离合套11重新建立联接的过程即为电机驱动过程;流量调节工作流程中,离合套11先下行后上行,离合套11安装在外壳4内,离合套11上端嵌入有导向键15,在导向键15对应的外壳4位置从上而下分别安装有定位导轨套16与换向导轨套13,这两个导轨套的的位置如附图2所示,离合套11的每次向下运动,其上的导向键15均会在换向导轨套13的作用下改变方位,使得离合套11上行时会顺序循环插入到定位
导轨套16不同的定位槽中,每个定位槽深度循环加深,使离合套11每次上行的距离也会循环加长,在本实施例中,离合套11上轴向布有3组过流孔,当导向键15插入到定位导轨套16中最短的关闭位槽1601中,离合套11上行距离最短,布置在之上的过流孔全部没有脱离连接壳12与离合套11建立的密封面,井筒内流体无法通过过流孔流出,整个节流器处于关闭状态,此时,完成一次流量调节工作流程;导向键15进入到定位导轨套16中的单组开启槽1602中,相比关闭位槽,离合套11上行距离加长,布置在其上的第一组过流孔穿过连接壳12与离合套11建立的密封面,井下流体通过该组过流孔建立与上部的沟通,同理当导向键15运动到定位导轨套16的双组开启槽1603时,离合套11将有2组过流孔建立与上部沟通,导向键15运动到定位导轨套16的三组开启槽1604时,离合套11将有3组过流孔建立与上部沟通,接触密封的过流孔越多流量越大,通过该种方式实现了多级可变流量调节。
38.外部机械力实现的多级可变流量调节机构改变节流流量时:
39.离合套11上端连接打捞杆18和连接头19,需要改变流量时,钢丝作业下入击锤工具撞击连接头19,连接头19带动打捞杆18将撞击力直接传递给离合套11,离合套11受力向下运动到限位后会在矩形弹簧9的作用下上行,完成流量调节工作流程,通过离合套11先下后上的动作,使安装在其上的导向键15变向进入到定位导轨套16不同的定位槽中,通过槽位行程差来控制节流孔解除密封的数量从而调节流量。
40.以上实施例对本发明进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1