一种TBM碴片识别系统及其振动补偿方法与流程
本发明涉及一种tbm碴片识别系统及其振动补偿方法,属于设备控制。
背景技术:
1、隧道掘进机(tunnel boring machine,tbm)是一种机、电、液等多系统组成的隧道建造设备。在隧道施工过程中,tbm的良好运行,对施工的安全性与高效性意义重大。对 掘进过程中tbm的运行参数进行先验了解,可以评估tbm的运行状态。岩碴是tbm掘进 过程中岩层在刀具滚压作用下产生的块状、片状、粉状等多种形貌不一的碴石,它的形状、 大小、表面粗糙度等物理性态可直接反映tbm的机械状态和当前施工的地质条件。将掘进 过程中产生的岩碴进行粒径分布统计对tbm的掘进状况以及围岩类别评估有一定的现实意 义。
2、一般情况下,将相机安装在tbm上对碴石进行采集和识别来判断tbm运行状态,但由于tbm在掘进作业过程中施工现场振动强度较大,对相机的数据采集产生较大的干扰,无法确保采集图片的质量,这给碴石识别任务带来了极大的挑战。为此,需要对相机进行振动补偿,有效的降低振动对图片质量的影响。
3、现有技术中在某些领域已经存在振动补偿技术,例如:申请公布号为cn106444862 a 的中国发明专利申请文件,该文件公开了一种六自由度的海浪补偿平台控制方法及系统,其 中采用六台伺服油缸构成六自由度海浪补偿平台,通过安装多个传感器测量、采集船舶的运 动信息,并将运动信号转换为驱动信号,驱动补偿机构运动来降低海浪冲击的影响。该专利 对当前船舶运动数据处理后输出控制信号,系统存在一定的滞后性;将船舶的运动信息转化 为海浪冲击信息,在运动信息发生急剧变化时,补偿系统存在鲁棒性差,反应不及时的问题, 且专利中并未给出系统结构框架和具体实施技术。tbm中的振动频率高,需要采集更加直 接,预测更为迅速。因此,该方法不适用于tbm碴片识别的振动补偿。
4、又例如:申请公布号为cn111994201a的中国发明专利申请文件,该文件公开了一种 基于海浪补偿装置的补偿方法,该补偿方法针对海浪影响,结合定平台位姿预测,对定平台 和动平台预测模型进行估计和更新,实现双前馈控制,该专利需要分别对动平台和静平台位 姿进行分别预测,且给出的预测算法为递归计算,计算量大导致系统响应速度慢。同时从应 用场景来看,海浪对于船舶的冲击具有低频性,幅度较大,信号采集与处理的许用时间长, 且海浪冲击信号无法直接获取,需测量船舶的运动信息用作补偿,而tbm振动补偿中,振 动信号具有高频性,幅度较小,非线性明显等特点,同时tbm碴片识别系统中,振动信号 可直接通过振动传感器获取,因此两种工况下信号对算法的要求和适用性具有本质差别,该 方法也不适用于tbm碴片识别的振动补偿。
5、又例如:授权公告号为cn 106791417 b的中国发明专利文件,该文件公开了一种风力 发电机机舱双路摄像头防抖系统,其针对于风力发电机机舱的监控抖动现象,采用双滑轨的 滑动方式和齿轮齿条传动的调节方法,使用多传感器融合采集信息,多路伺服电机进行控制。 该专利采用的双滑轨结构在空间内的位置调整需要依靠偏摆和俯仰方向的电机和齿轮传动, 不具有灵活性,振动传感器仅仅关注于x轴方向和y轴方向的抖动数据,忽略了z轴数据, 且在进行补偿运动时是采用插值规划生成运动轨迹,不仅计算复杂,而且补偿结构不灵活。 而tbm碴石识别任务中,振动信号较为密集,需要整体结构操作灵活,因此,该方式不适 用于tbm碴片识别的振动补偿。
6、又例如:申请公布号为cn112287552a的中国发明专利申请文件,该文件公开了一种 航空发动机趋势分析方法,将发动机的振动基频和转速数据用来筛选品质因数,作为振动数 据分析稳态趋势,发动机正常运行时的振动数据具有平稳性,此方法专注于系统的稳态特征, 将非平稳数据和非线性数据作为故障信号,但tbm在掘进过程中正常产生的振动信号具有 非线性和时变性,不具有稳态特征,因此此方法并不适用tbm碴片识别。
7、又例如:期刊为《流动传动与控制》、期刊号为2009(1):16-18的期刊文章,该文章公 开了液压伺服振动台的基于重复控制补偿pid控制方法,但系统稳态精度不高。又例如:期 刊为《制造技术与机床》、期刊号为2019,000(005):72-75的期刊文章,该文章公开了一种液 压振动台位移补偿的pid控制方式的研究,其中建立了双闭环控制液压振动台,对位移和压 力值信号进行检测,通过pid在线补偿,基于pid的控制在一定程度上改善了位移控制精 度,但在tbm振动信号非线性明显的情况下表现出自适应力低,响应滞后等性能缺陷。
8、综上,现有的各种补偿技术不适用于tbm碴片识别,因此,需要提出一种适用于tbm碴片识别的振动补偿的技术方案。
技术实现思路
1、本技术的目的在于提供一种tbm碴片识别系统及其振动补偿方法,为提高tbm碴片的识别质量提出一种行之有效的技术方案。
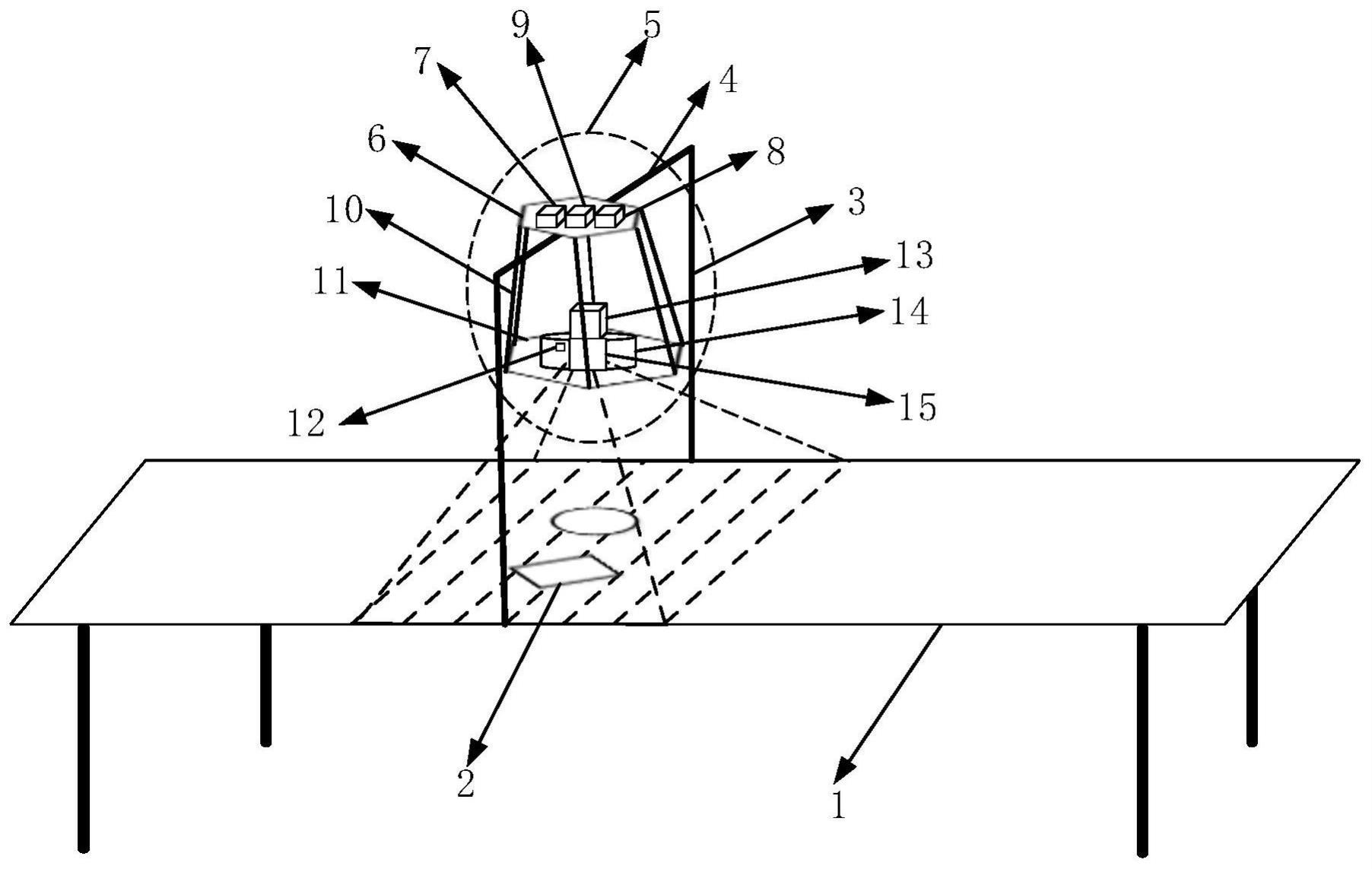
2、为实现上述目的,本技术提出了一种tbm碴片识别系统的技术方案,包括静平台、动 平台和控制器;动平台和静平台通过若干个作动器固定连接,所述作动器为可伸缩的设备; 控制器的输入端连接位姿检测装置控制器的输出端控制连接各作动器;静平台通过固定装置 固定在tbm碴片输送装置的上方,静平台上固定有位姿检测装置,用于检测静平台的位姿 变化,以得到静平台的振动数据;动平台设置在静平台的下方、tbm碴片输送装置的上方, 动平台上固定有摄像装置,用于拍摄tbm碴片;控制器用于根据静平台的振动数据计算出 各作动器的伸缩量,进而控制作动器进行伸缩,以调整动平台的位姿,实现振动补偿动作。
3、本发明的tbm碴片识别系统的技术方案的有益效果是:本发明通过在tbm碴片输送装置的上方安装一个静平台,静平台上固定位姿检测装置,并通过可伸缩的作动器将设置有 摄像装置的动平台连接,控制器根据位姿检测装置所采集的数据计算出作动器的伸缩量进而 控制作动器运动,以调整动平台的位姿,降低振动影响,保证动平台的稳定性。
4、进一步的,位姿检测装置包括三轴振动传感器和陀螺仪。
5、进一步的,作动器与静平台、动平台通过连接装置进行固定,连接装置以多边形顶点的 方式固定在各平台上,所述作动器包括伸缩部分和固定部分,伸缩部分连接动平台的连接装 置,固定部分连接静平台的连接装置。
6、进一步的,所述固定装置包括设置在tbm碴片输送装置两侧的连接架以及与连接架连 接的悬挂架,静平台固定在悬挂架上。
7、另外,本技术还提出了一种适用于上述tbm碴片识别系统的振动补偿方法的技术方案, 包括以下步骤:
8、1)获取静平台的当前时刻以及上一时段内的振动数据;所述振动数据为包括位置信息 和姿态信息的n自由度数据;
9、2)将所获取的振动数据输入训练好的循环神经网络模型中,预测出下一时段内的振动 数据;所述训练好的循环神经网络模型通过历史的静平台振动数据训练得到;
10、3)根据预测的振动数据计算出动平台的补偿位姿;
11、4)根据动平台的补偿位姿、结合预先建立好的tbm碴片识别系统的运动学模型,得到下一时刻每个作动器与动平台在补偿位姿下的连接点坐标;所述运动学模型通过包含动平 台、静平台以及若干作动器的并联结构参数化建立;
12、5)将下一时刻每个作动器与动平台在补偿位姿下的连接点坐标结合当前时刻每个作动 器与静平台的连接点坐标得到下一时刻补偿位姿对应的每个作动器的长度,下一时刻补偿位 姿对应的每个作动器的长度与当前时刻每个作动器的长度的差值为每个作动器的伸缩量;
13、6)控制每个作动器下一时刻以所述伸缩量进行运动,实现动平台的振动补偿。
14、本发明的tbm碴片识别系统的振动补偿方法的技术方案的有益效果是:本发明通过建 立识别系统的运动学模型以及循环神经网络模型,将获取的当前时刻以及上一时段内的振动 数据输入循环神经网络模型中得到下一时段内的振动数据,进而根据振动数据结合运动学模 型计算出动平台的补偿位姿,并通过补偿位姿求得各作动器的伸缩量,控制每个作动器运动, 实现动平台的振动补偿。本发明能够解决系统补偿的滞后性问题,并且计算简单,提高了系 统效率。
15、进一步的,所述步骤1)还包括将振动数据进行预处理和标准化的过程,所述预处理包 括对振动数据筛选和清洗的步骤。
16、进一步的,所述步骤2)中的循环神经网络模型为gru神经网络模型。
17、进一步的,所述步骤3)中动平台补偿位姿的计算过程为:
18、cqt=ccur-tδ[yδtx,yδty,yδtz,yδtα,yδtβ,yδtγ]t;
19、其中,cqt为当前时刻以后,t时间内动平台的补偿位姿;t为预测时间间隔;δ为振动系数;ccur为当前时刻动平台的位姿;[yδtx,yδty,yδtz,yδtα,yδtβ,yδtγ]t为预测的滤波后的六 自由度的振动数据。
20、进一步的,下一时刻补偿位姿对应的每个作动器的长度为:
21、lti=btai-ai,i=1,2,…,6;
22、其中,lti为下一时刻补偿位姿对应的第i个作动器的长度;btai为下一时刻在静坐标系 下第i个作动器与动平台在补偿位姿下的连接点坐标;ai为当前时刻在静坐标系下第i个作 动器与静平台的连接点坐标。
- 还没有人留言评论。精彩留言会获得点赞!