一种绞车安全运行自动巡检机器人的制作方法
1.本实用新型涉及一种绞车安全运行自动巡检机器人,属于巡检机器人技术领域。
背景技术:
2.无极绳连续牵引车是煤矿辅助运输装备。以一台无极绳绞车作为驱动装置,以钢丝绳为牵引构件,与张紧装置、梭车、尾轮等配套设备一起构成一套完整的无极绳连续牵引车运输系统,适用于有瓦斯和煤尘的煤矿井下工作面顺槽和轨道巷,实现材料、设备的长距离连续高效运输,特别适用于大型综采设备(如成台支架等)的连续运输。
3.由于梭车作为牵引车,运行在轨道上,煤矿巷道极其狭窄,长度比较长,尤其有的轨道建设在原煤输送机巷道内,轨道上容易掉落大型煤块,或者由于操作工不按规范操作,造成轨道上有人。梭车运行速度比较快,梭车撞人或者脱轨造成人员事故。现有解决方式主要巷道内分段安装监控摄像头,人员来观测轨道上是否有大型煤块或者人员,由于巷道长度长,环境昏暗,监控摄像头不能完全监控容易出现死角,工作人员有时监测不及时还是容易产生事故。
技术实现要素:
4.为解决现有技术存在的技术问题,本实用新型提供了一种能够准确检测梭车轨道前方情况,自动控制的绞车安全运行自动巡检机器人。
5.为实现上述目的,本实用新型所采用的技术方案为一种绞车安全运行自动巡检机器人,包括安装在轨道上的梭车及安装在梭车上的机器人本体,所述机器人本体主要由电池箱体、旋转臂、激光雷达和双光谱摄像头构成,所述电池箱体的底部两侧安装有连接座,所述电池箱体通过连接座固定在梭车上,所述电池箱体上安装有蜗轮蜗杆电机,所述电池箱体的侧部安装有天线,所述蜗轮蜗杆电机上安装有旋转臂,所述旋转臂的端部安装有连接支架,所述连接支架上安装有激光雷达,所述激光雷达的底部安装有双光谱摄像头,所述蜗轮蜗杆电机、激光雷达和双光谱摄像头分别与控制主机相连接,所述控制主机与绞车控制台电信号连接,所述绞车控制台用于控制梭车移动,并将梭车移动信号传输给控制主机;所述控制主机用于控制蜗轮蜗杆电机转动,激光雷达和双光谱摄像头转动至信号采集位置,同时用于接收激光雷达和双光谱摄像头的采集信号,并根据采集信号通过绞车控制台控制梭车停止;所述激光雷达和双光谱摄像头分别用于检测梭车运行轨道前方情况,是否有操作人员或杂物。
6.优选的,所述电池箱体的顶部还安装有两个限位支架,所述限位支架分别位于旋转臂的两侧,且两个限位支架之间垂直设置。
7.优选的,所述电池箱体的顶部还安装有位置传感器。
8.优选的,所述双光谱摄像头采用30倍光学变焦普通光镜头和386*640分辨率的热成像镜头。
9.优选的,所述轨道的中部安装有无线充电装置发射端,所述梭车的底部安装有无
线充电装置接收端,所述无线充电装置接收端用于与电池箱体的电池连接进行充电。
10.与现有技术相比,本实用新型具有以下技术效果:本实用新型中采用在梭车头部安装摇臂式巡检机器人,便于观测梭车前方轨道情况,发现大型煤块或者人员时发出报警,通过无线网络自动控制绞车停止并通知绞车司机处理。巡检机器人采用激光雷达和双光谱摄像头,保证识别人员准确度,并且激光雷达能够检测轨道平整情况,时刻检测绞车运行情况,避免由于矿井经常出现地质变动,影响轨道的平整性,导致梭车及后面矿车运行安全,进而导致脱轨及人员伤亡的情况。
11.此外,该设备的运行过程为工作人员发出开车信号,梭车从梭车房出来,自动巡检机器人开始旋转摇臂到监控位置,梭车沿轨道到指定位置,拉上矿车,沿轨道运行到巷道底部,绞车房装无线充电桩,给自动巡检机器人充电。
附图说明
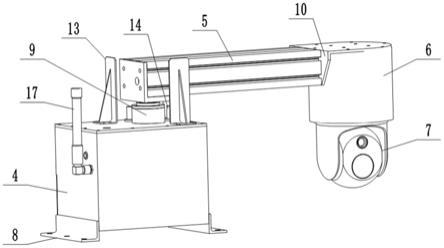
12.图1为本实用新型的结构示意图。
13.图2为本实用新型的使用状态示意图。
具体实施方式
14.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
15.如图1和图2所示,一种绞车安全运行自动巡检机器人,包括安装在轨道1上的梭车2及安装在梭车上的机器人本体3,机器人本体3主要由电池箱体4、旋转臂5、激光雷达6和双光谱摄像头7构成,电池箱体4的底部两侧安装有连接座8,电池箱体4通过连接座8固定在梭车1上,电池箱体4上安装有蜗轮蜗杆电机9,电池箱体4的侧部安装有天线17,蜗轮蜗杆电机9上安装有旋转臂5,旋转臂5的端部安装有连接支架10,连接支架10上安装有激光雷达6,激光雷达6的底部安装有双光谱摄像头7,蜗轮蜗杆电机9、激光雷达6和双光谱摄像头7分别与控制主机11相连接,控制主机11与绞车控制台12电信号连接,绞车控制台12用于控制梭车移动,并将梭车移动信号传输给控制主机11;控制主机11用于控制蜗轮蜗杆电机转动,激光雷达和双光谱摄像头转动至信号采集位置,同时用于接收激光雷达和双光谱摄像头的采集信号,并根据采集信号通过绞车控制台控制梭车停止;激光雷达和双光谱摄像头分别用于检测梭车运行轨道前方情况,是否有操作人员或杂物。
16.本实用新型中采用在梭车的头部安装有摇臂式巡检机器人。摇臂式巡检机器人利用蜗轮蜗杆电机9控制旋转臂5转动,使激光雷达和双光谱摄像头能够转动至梭车的一侧,用于检测梭车轨道前方的情况。电池箱体4的顶部还安装有两个限位支架13,限位支架13分别位于旋转臂5的两侧,且两个限位支架之间垂直设置。限位支架用于限制旋转臂的位置,对旋转臂进行限位。电池箱体4的顶部还安装有位置传感器14,位置传感器能够准确控制旋转臂的位置。在具体使用时,梭车运行时绞车控制台给控制主机发出信号,控制主机通过无线给机器人本体旋转出信号,控制蜗轮蜗杆电机带动旋转臂,将激光雷达与双光谱摄像头到达与梭车车身成90度位置,通过位置传感器来感应旋转臂位置,梭车运行摄像头与激光雷达实时检测梭车前方轨道情况,是否有操作人员。并把实时图像传到控制主机,保证绞车
安全运行。双光谱摄像头7采用30倍光学变焦普通光镜头和386*640分辨率的热成像镜头,保证识别人员准确度。
17.其中,轨道1的中部安装有无线充电装置发射端15,梭车2的底部安装有无线充电装置接收端16,无线充电装置接收端16用于与电池箱体的电池连接进行充电。当梭车停止运行时给自动巡检机器人充电。
18.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包在本实用新型范围内。
技术特征:
1.一种绞车安全运行自动巡检机器人,包括安装在轨道上的梭车及安装在梭车上的机器人本体,其特征在于:所述机器人本体主要由电池箱体、旋转臂、激光雷达和双光谱摄像头构成,所述电池箱体的底部两侧安装有连接座,所述电池箱体通过连接座固定在梭车上,所述电池箱体上安装有蜗轮蜗杆电机,所述电池箱体的侧部安装有天线,所述蜗轮蜗杆电机上安装有旋转臂,所述旋转臂的端部安装有连接支架,所述连接支架上安装有激光雷达,所述激光雷达的底部安装有双光谱摄像头,所述蜗轮蜗杆电机、激光雷达和双光谱摄像头分别与控制主机相连接,所述控制主机与绞车控制台电信号连接,所述绞车控制台用于控制梭车移动,并将梭车移动信号传输给控制主机;所述控制主机用于控制蜗轮蜗杆电机转动,激光雷达和双光谱摄像头转动至信号采集位置,同时用于接收激光雷达和双光谱摄像头的采集信号,并根据采集信号通过绞车控制台控制梭车停止;所述激光雷达和双光谱摄像头分别用于检测梭车运行轨道前方情况,是否有操作人员或杂物。2.根据权利要求1所述的一种绞车安全运行自动巡检机器人,其特征在于:所述电池箱体的顶部还安装有两个限位支架,所述限位支架分别位于旋转臂的两侧,且两个限位支架之间垂直设置。3.根据权利要求1所述的一种绞车安全运行自动巡检机器人,其特征在于:所述电池箱体的顶部还安装有位置传感器。4.根据权利要求1所述的一种绞车安全运行自动巡检机器人,其特征在于:所述双光谱摄像头采用30倍光学变焦普通光镜头和386*640分辨率的热成像镜头。5.根据权利要求1所述的一种绞车安全运行自动巡检机器人,其特征在于:所述轨道的中部安装有无线充电装置发射端,所述梭车的底部安装有无线充电装置接收端,所述无线充电装置接收端用于与电池箱体的电池连接进行充电。
技术总结
本实用新型涉及一种绞车安全运行自动巡检机器人,属于巡检机器人技术领域,具体包括安装在轨道上的梭车及安装在梭车上的机器人本体,机器人本体主要由电池箱体、旋转臂、激光雷达和双光谱摄像头构成,电池箱体的底部两侧安装有连接座,电池箱体通过连接座固定在梭车上,电池箱体上安装有蜗轮蜗杆电机,电池箱体的侧部安装有天线,蜗轮蜗杆电机上安装有旋转臂,旋转臂的端部安装有连接支架,连接支架上安装有激光雷达,激光雷达的底部安装有双光谱摄像头,蜗轮蜗杆电机、激光雷达和双光谱摄像头分别与控制主机相连接,控制主机与绞车控制台电信号连接;本实用新型能够准确检测梭车轨道前方情况,自动控制。自动控制。自动控制。
技术研发人员:袁峰 冯云飞 李亚帅 张鹏宇 陈得生 范鑫杰 张雪亮 许志勇 贾好 董永路 张丽峰 张健 赵建科
受保护的技术使用者:山西戴德测控技术有限公司
技术研发日:2021.06.30
技术公布日:2021/12/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1