一种盾构机管片自动抓取装置的制作方法
1.本实用新型属于盾构机控制技术领域,具体涉及一种盾构机管片自动抓取装置。
背景技术:
2.目前在盾构机上使用的盾构机管片抓取装置均采用遥控与人工相结合的方式进行作业,使用遥控器操纵机械式抓取头移动至盾构机管片的上方,由现场工人将机械式抓取头固定于盾构机管片中心安装的螺栓上,抓取头固定完成后再使用遥控器操纵梁式起重机带动盾构机管片移动进行运输。目前使用的盾构机管片抓取装置采用的遥控与人工相结合的方式进行作业,不仅消耗人力,同时也存在一定的安全隐患。
技术实现要素:
3.本实用新型公开了一种盾构机管片自动抓取装置,拟解决现有盾构机管片抓取装置在进行盾构机管片抓取作业的过程中不仅消耗人力,同时也存在一定的安全隐患的问题。
4.为解决上述技术问题,本实用新型采用的技术方案如下:
5.一种盾构机管片自动抓取装置,包括用于放置管片的承载盘,所述承载盘上通过支撑装置支撑有导轨,所述导轨上安装有能够沿导轨长度方向移动的装载车,所述装载车上安装有驱动装置和伸缩装置的固定端,伸缩装置的伸缩端通过连接臂安装有安装盘,所述安装盘上安装有真空吸盘,所述真空吸盘通过抽吸管道与真空泵连接,所述抽吸管道上设有第一压力表和第一阀门;所述装载车上安装有用于测定所述装载车沿导轨长度方向移动距离的水平测距仪,所述装载车上还安装有用于测定所述装载车与管片之间垂直距离的垂直测距仪;所述第一压力表、水平测距仪和垂直测距仪的信号输出端与控制器的信号输入端连接,所述驱动装置、伸缩装置、真空泵和第一阀门的信号输入端均与所述控制器的信号输出端连接,所述控制器的信号输出端与紧急制动装置的信号输入端连接。
6.上述技术方案的工作原理如下:
7.通过在装载车上安装水平测距仪对装载车的位置进行实时监测,并将装载车的位置信号发送给控制器,控制器将接收到装载车的位置信号与设定的水平距离进行对比,并根据对比结果是否满足运行条件对驱动装置下达运行或停止的指令;当装载车移动至指定位置时,控制器控制伸缩装置带动真空吸盘下落,下落距离为垂直测距仪测定的装载车与管片之间垂直距离,真空吸盘与管片接触后,控制器控制真空泵将真空吸盘吸附于管片上,通过第一压力表测量抽吸管道内的压力值,控制器将接收到的压力值与设定的压力值进行对比,若对比结果满足运行条件,控制器控制伸缩装置带动真空吸盘与管片进行提升,若对比结果不满足运行条件,控制器控制第一阀门开启,使真空吸盘脱离管片,控制器重新调节伸缩装置位置,直至真空吸盘吸附于管片上的压力值满足运行条件,通过设置于由控制器控制的紧急制动装置,当装载车位置异常或者抽吸管道内压力异常时制停盾构机管片自动抓取装置。
8.相比于现有技术,本技术方案通过采用控制器取代遥控与人工相结合的方式对盾构机管片自动抓取装置进行控制,控制器根据水平测距仪和垂直测距仪输出的信号对驱动装置、伸缩装置和真空泵的状态进行调节,并设置了紧急制动装置以应对紧急状况,不仅减少了人力的消耗,同时也减少了安全隐患。
9.进一步的,所述真空吸盘与管片相接触的一面的弧度与管片内径的弧度一致。
10.通过对真空吸盘形状的设置,使真空吸盘能够更加贴合盾构机管片,使管片抓取过程更加顺利。
11.进一步的,所述真空吸盘上设有若干个与所述抽吸管道连接的空气抽排口。
12.通过设置与抽吸管道连接的空气抽排口,真空泵通过空气抽排口抽取真空吸盘与管片之间的空气,进而使真空吸盘吸附于管片上。
13.进一步的,在所述真空吸盘与管片相接触的面上,围绕所述空气抽排口设置有柔性密封条;且所述真空吸盘与管片相接触的面上设置有若干个尼龙条。
14.通过在真空吸盘上设置尼龙条和围绕空气抽排口设置柔性密封条,在对真空吸盘起到减震及保护作用的同时使真空吸盘可以与管片更加紧密的接触,提高了盾构机管片自动抓取装置的稳定性。
15.进一步的,所述空气抽排口上设置有滤网。
16.通过在空气抽排口上设置滤网,避免了空气中的杂质对管片抓取过程的影响,提高了盾构机管片自动抓取装置的稳定性。
17.进一步的,所述驱动装置的输出端上设置有齿轮,且沿导轨长度方向设置有与所述齿轮相互配合的齿条。
18.通过设置齿轮和齿条,使装载车可以更加精准的移动至指定位置,避免了因装载车与导轨之间摩擦力过低导致的错位。
19.进一步的,所述伸缩装置为伸缩油缸,所述伸缩油缸与泵站的连接管道上设置有第二压力表和温度表,所述伸缩油缸的进油口和出油口均设有第二阀门,所述第二压力表和温度表的信号输出端均与所述控制器的信号输入端连接,所述控制器的信号输出端与所述第二阀门的信号输入端连接。
20.通过设置第二压力表、温度表和第二阀门,控制器接收到来自第二压力表和温度表的信号,并将该信号与设定值对比,根据对比结果控制第二阀门的开启与闭合,可在伸缩油缸内压力或温度异常时使其停止运作,提升了盾构机管片自动抓取装置的安全性。
21.进一步的,还包括声光报警器,所述声光报警器的信号输入端与所述控制器的信号输出端连接。
22.通过设置由控制器控制的声光报警器,可在伸缩油缸内压力或温度异常时或者抽吸管道内压力异常时向周围的工作人员发出警报,提高了盾构机管片自动抓取装置的安全性。
23.本实用新型的有益效果包括:
24.1、通过采用控制器取代遥控与人工相结合的方式对盾构机管片自动抓取装置进行控制,控制器根据水平测距仪和垂直测距仪输出的信号对驱动装置、伸缩装置和真空泵的状态进行调节,并设置了紧急制动装置在,不仅减少了人力的消耗,同时也减少了安全隐患。
25.2、通过对真空吸盘形状的设置,使真空吸盘能够更加贴合盾构机管片,使管片抓取过程更加顺利。
26.3、通过设置与抽吸管道连接的空气抽排口,真空泵通过空气抽排口抽取真空吸盘与管片之间的空气,进而使真空吸盘吸附于管片上。
27.4、通过在真空吸盘上设置尼龙条和围绕空气抽排口设置柔性密封条,在对真空吸盘起到减震及保护作用的同时使真空吸盘可以与管片更加紧密的接触,提高了盾构机管片自动抓取装置的稳定性。
28.5、通过在空气抽排口上设置滤网,避免了空气中的杂质对管片抓取过程的影响,提高了盾构机管片自动抓取装置的稳定性。
29.6、通过设置齿轮和齿条,使装载车可以更加精准的移动至指定位置,避免了因装载车与导轨之间摩擦力过低导致的错位。
30.7、通过设置第一压力表、温度表和第一阀门,控制器接收到来自第一压力表和温度表的信号,并将该信号与设定值对比,根据对比结果控制第一阀门的开启与闭合,可在伸缩油缸内压力或温度异常时使其停止运作,提升了盾构机管片自动抓取装置的安全性。
31.8、通过设置由控制器控制的声光报警器,可在伸缩油缸内压力或温度异常时或者抽吸管道内压力异常时向周围的工作人员发出警报,提高了盾构机管片自动抓取装置的安全性。
附图说明
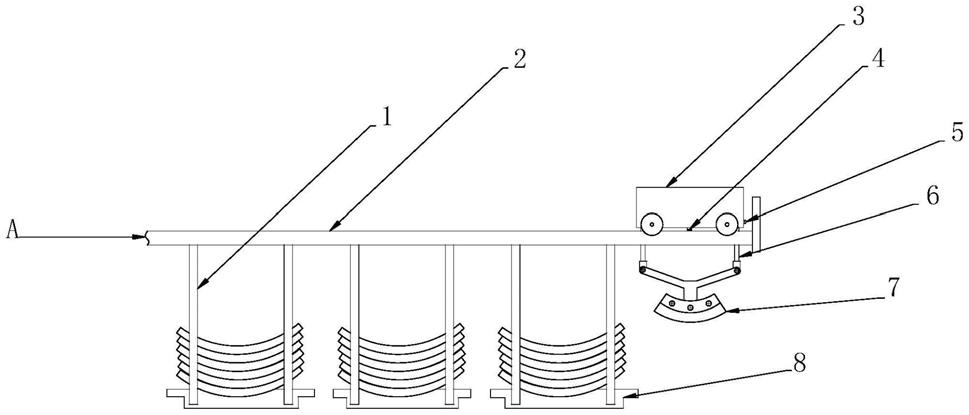
32.图1为本实用新型一种盾构机管片自动抓取装置的结构图。
33.图2为图1的a向视图。
34.图3为图1中安装盘与真空吸盘的结构图。
35.图4为图3的b向视图。
36.附图标记说明:
37.1.支撑装置;2.导轨;3.装载车;4.垂直测距仪;5.水平测距仪;6.伸缩装置;7.
38.真空吸盘;8.承载盘。
具体实施方式
39.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施例的组件可以各种不同的配置来布置和设计。因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
40.参见附图1至附图4本实施例的一种盾构机管片自动抓取装置,包括用于放置管片的承载盘8,所述承载盘8上通过支撑装置1支撑有导轨2,所述导轨2上安装有能够沿导轨2长度方向移动的装载车3,所述装载车3上安装有驱动装置和伸缩装置6的固定端,伸缩装置6的伸缩端通过连接臂安装有安装盘,所述安装盘上安装有真空吸盘7,所述真空吸盘7通过
抽吸管道与真空泵连接,所述抽吸管道上设有第一压力表和第一阀门;所述装载车3上安装有用于测定所述装载车3沿导轨2长度方向移动距离的水平测距仪5,所述装载车3上还安装有用于测定所述装载车3与管片之间垂直距离的垂直测距仪4;所述第一压力表、水平测距仪5和垂直测距仪4的信号输出端与控制器的信号输入端连接,所述驱动装置、伸缩装置6、第一阀门和真空泵的信号输入端均与所述控制器的信号输出端连接,所述控制器的信号输出端与紧急制动装置的信号输入端连接。
41.上述实施例的工作原理如下:
42.通过在装载车3上安装水平测距仪5对装载车3的位置进行实时监测,并将装载车3的位置信号发送给控制器,控制器将接收到装载车3的位置信号与设定的水平距离进行对比,并根据对比结果是否满足运行条件对驱动装置下达运行或停止的指令;当装载车3移动至指定位置时,控制器控制伸缩装置6带动真空吸盘7下落,下落距离为垂直测距仪4测定的装载车3与管片之间垂直距离,真空吸盘7与管片接触后,控制器控制真空泵将真空吸盘7吸附于管片上,通过第一压力表测量抽吸管道内的压力值,控制器将接收到的压力值与设定的压力值进行对比,若对比结果满足运行条件,控制器控制伸缩装置6带动真空吸盘7与管片进行提升,若对比结果不满足运行条件,控制器控制第一阀门开启,使真空吸盘7脱离管片,控制器重新调节伸缩装置6位置,直至真空吸盘7吸附于管片上的压力值满足运行条件,通过设置于由控制器控制的紧急制动装置,当装载车3位置异常或者抽吸管道内压力异常时制停盾构机管片自动抓取装置。
43.具体的,所述控制器为plc控制芯片,所述紧急制动装置为制动器,所述制动器设置于所述驱动装置的输出端。
44.相比于现有技术,本技术方案通过采用控制器取代遥控与人工相结合的方式对盾构机管片自动抓取装置进行控制,控制器根据水平测距仪5和垂直测距仪4输出的信号对驱动装置、伸缩装置6和真空泵的状态进行调节,并设置了紧急制动装置以应对紧急状况,不仅减少了人力的消耗,同时也减少了安全隐患。
45.本实施例中,所述真空吸盘7与管片相接触的一面的弧度与管片内径的弧度一致。
46.通过对真空吸盘7形状的设置,使真空吸盘7能够更加贴合盾构机管片,使管片抓取过程更加顺利。
47.本实施例中,所述真空吸盘7上设有若干个与所述抽吸管道连接的空气抽排口。
48.具体的,所述空气抽排口设有3个,均匀分布于真空吸盘7与管片相接触的一面上。
49.通过设置与抽吸管道连接的空气抽排口,真空泵通过空气抽排口抽取真空吸盘7与管片之间的空气,进而使真空吸盘7吸附于管片上。
50.本实施例中,在所述真空吸盘7与管片相接触的面上,围绕所述空气抽排口设置有柔性密封条;且所述真空吸盘7与管片相接触的面上设置有若干个尼龙条。
51.具体的,所述柔性密封条设置于空气抽排口外围,且距离真空吸盘7外边缘30毫米处。
52.通过在真空吸盘7上设置尼龙条和围绕空气抽排口设置柔性密封条,在对真空吸盘7起到减震及保护作用的同时使真空吸盘7可以与管片更加紧密的接触,提高了盾构机管片自动抓取装置的稳定性。
53.本实施例中,所述空气抽排口上设置有滤网。
54.通过在空气抽排口上设置滤网,避免了空气中的杂质对管片抓取过程的影响,提高了盾构机管片自动抓取装置的稳定性。
55.本实施例中,所述驱动装置的输出端上设置有齿轮,且沿导轨2长度方向设置有与所述齿轮相互配合的齿条。
56.具体的,驱动装置包括电动机和减速器,减速器设置于电动机的输出端上,减速器的输出端为输出装置的输出端。
57.通过设置齿轮和齿条,使装载车3可以更加精准的移动至指定位置,避免了因装载车3与导轨2之间摩擦力过低导致的错位。
58.本实施例中,所述伸缩装置6为伸缩油缸,所述伸缩油缸与泵站的连接管道上设置有第二压力表和温度表,所述伸缩油缸的进油口和出油口均设有第二阀门,所述第二压力表和温度表的信号输出端均与所述控制器的信号输入端连接,所述控制器的信号输出端与所述第二阀门的信号输入端连接。
59.通过设置第二压力表、温度表和第二阀门,控制器接收到来自第二压力表和温度表的信号,并将该信号与设定值对比,根据对比结果控制第二阀门的开启与闭合,可在伸缩油缸内压力或温度异常时使其停止运作,提升了盾构机管片自动抓取装置的安全性。
60.本实施例中,还包括声光报警器,所述声光报警器的信号输入端与所述控制器的信号输出端连接。
61.通过设置由控制器控制的声光报警器,可在伸缩油缸内压力或温度异常时或者抽吸管道内压力异常时向周围的工作人员发出警报,提高了盾构机管片自动抓取装置的安全性。
62.以上所述实施例仅表达了本技术的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术技术方案构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1