一种具备人工智能的油田修井无人作业装置及其使用方法与流程
1.本发明属于油田技术领域,具体为一种具备人工智能的油田修井无人作业装置及其使用方法。
背景技术:
2.单一地质构造(或地层)因素控制下的、同一产油气面积内的油气藏总和,一个油气田可能有一个或多个油气藏,在同一面积内主要为油藏的称油田,主要为气藏的称气田,按控制产油气面积内的地质因素,将油气田分为3类:
①
构造型油气田,指产油气面积受单一的构造因素控制,如褶皱和断层,
②
地层型油气田,区域背斜或单斜构造背景上由地层因素控制(如地层的不整合、尖灭和岩性变化等)的含油面积,
③
复合型油气田,产油气面积内不受单一的构造或地层因素控制,而受多种地质因素控制的油气田。
3.现有的油井维修,主要集中在对油管的更换和提取,在后续的维护工程中发现,首先是传统的吊装装置,将油管提出后,往往无法快速进行倾倒安装,在收纳的过程中,极易产生撞击,导致油管产生损坏,其次是在更换油管时,采用人力进行牵引油管,导致整体的维护效率较低,且维护效率不稳定,受制于人为因素,导致无法保持高效率和长时间并行。
技术实现要素:
4.本发明的目的在于:利用六轴机械臂完成油田作业井的吊环摘、挂,油管吊卡开、合搬移的工作过程,人工智能控制箱模拟人的工作模式,实现对六轴机械臂的控制,达到油田油井作业无人操作的目的,且在油管进行更换额加装时,利用收纳架、滚轮架、安装架与安装槽,可以实现对油管的初步收纳、也方便新的油管运输,提高油管更换效率。
5.本发明采用的技术方案如下:一种具备人工智能的油田修井无人作业装置,包括:六轴机械臂,其用于对油管进行牵引更换;牵引组件,其用于对油管进行牵引和更换加装,所述牵引组件包括六轴机械臂、人工智能控制箱、控制传输线缆、六轴机械臂安装底座、井口压敏传感器、吊环、吊卡、油管、油井管与收纳组件,所述油井管嵌设于指定工作面,所述六轴机械臂安装底座通过螺栓与法兰套设于油井管的外壁处,所述六轴机械臂安装设置于六轴机械臂安装底座的外壁顶部处,所述井口压敏传感器套设于油井管的靠近顶端外壁处,所述油管与油井管相互匹配,所述油管与吊卡相互匹配,所述人工智能控制箱通过控制传输线缆与六轴机械臂之间信号连接,所述人工智能控制箱通过控制传输线缆与井口压敏传感器之间信号连接,所述收纳组件处于油井管的一侧处,所述吊环通过伸缩缠绕设置于外部升降装置,所述吊环与吊卡相互匹配。
6.进一步的,所述收纳组件包括收纳架、滚轮架、安装架与安装槽,所述收纳架与滚轮架相互匹配,所述安装架通过转轴套设于滚轮架的外壁处,所述安装槽开设于安装架的外壁处。
7.进一步的,所述油管的顶端通过月牙锁卡接于吊卡的内壁处。
8.一种具备人工智能的油田修井无人作业装置的使用方法,包括以下步骤:步骤一、提油管修井过程的吊卡搬移;步骤二、提油管修井过程的油管下端引导;步骤三、提油管修井过程的吊环摘挂;步骤四、下油管修井过程的吊环摘挂;步骤五、下油管修井过程的油管下端引导;步骤六、下油管过程的吊卡搬移。
9.进一步的,包括以下步骤:根据步骤一中的操作步骤,所述吊环挂着油管吊卡上行,井口压敏传感器会发出信号给人工智能控制箱,人工智能控制箱则按预设的程序发出控制指令给带电磁抓手的六轴机械臂,带电磁抓手的六轴机械臂开始工作,利用其头部电磁抓手将油管桥架上油管上的吊卡解除半月环锁,俩臂协同将油管上的吊卡搬移至井口上,待油井管中的油管的接箍露出井口后,移动吊卡,使油井管中的油管位于吊卡内,接箍位于吊卡上部,然后关闭吊卡上的月牙锁环锁定油管,完成吊卡搬移动作,带电磁抓手的六轴机械臂归位。
10.进一步的,包括以下步骤:根据步骤二中的操作步骤,所述吊环携吊卡及油井管中的油管下行,井口位置的油管接箍卡在吊卡上,井口压敏传感器发出信号,井口液压管钳工作,卸扣,井口液压管钳工作完成后,吊环携吊卡先上后下,放油管,带电磁抓手的六轴机械臂将油管下端部引导至油管桥,开始油管沿引桥的下放过程,动作完成,带电磁抓手的六轴机械臂归位。
11.进一步的,包括以下步骤:根据步骤三中的操作步骤,所述油管沿引桥的下放过程结束,带电磁抓手的六轴机械臂启动工作,电磁抓手钳住油管桥架上的吊环,抽掉吊卡上锁吊环的插销,摘下管桥架上挂在吊卡上的吊环,然后将吊环搬移至井口的吊卡耳上,挂入吊卡,插上位于吊卡上的吊环锁销,动作完成,带电磁抓手的六轴机械臂归位。
12.进一步的,包括以下步骤:根据步骤四中的操作步骤,所述吊环携吊卡下放油井管中的油管至吊卡落在井口(或封井器)法兰,坐实,井口压敏传感器会发出信号给人工智能控制箱,人工智能控制箱则按预设的程序发出控制指令给带电磁抓手的六轴机械臂,带电磁抓手的六轴机械臂开始工作,利用其头部电磁抓手钳住吊环,拔出吊卡上锁吊环的锁销,摘下吊环,俩臂协同将吊环搬移至管桥架上的吊卡上,将吊环挂在吊卡上,插上吊卡上的吊环锁销,动作完成,带电磁抓手的六轴机械臂归位。
13.进一步的,包括以下步骤:根据步骤五中的操作步骤,所述吊环携吊卡上行至油管下端部离开管桥架时,带电磁抓手的六轴机械臂协同钳住油管下端部,并通过其上的电磁机械手引导至井口的油管接箍上,动作完成,带电磁抓手的六轴机械臂归位。
14.进一步的,包括以下步骤:根据步骤六中的操作步骤,所述井口液压管钳工作,上扣,井口液压管钳工作完成后,吊环携吊卡上行,油管接箍离开井口吊卡,这时带电磁抓手的六轴机械臂启动工作,对油井管法兰上的吊卡,打开吊卡上的锁油管的月牙锁环,利用其上的电磁机械手握住吊卡,并将吊卡搬移至油管桥上的油管上,关闭吊卡上的油管月牙锁环,锁定油管,完成动作,带电磁抓手的六轴机械臂归位。
15.综上所述,由于采用了上述技术方案,本发明的有益效果是:本发明中,利用六轴机械臂完成油田作业井的吊环摘、挂,油管吊卡开、合搬移的
工作过程,人工智能控制箱模拟人的工作模式,实现对六轴机械臂的控制,达到油田油井作业无人操作的目的,且在油管进行更换额加装时,利用收纳架、滚轮架、安装架与安装槽,可以实现对油管的初步收纳、也方便新的油管运输,提高油管更换效率。
附图说明
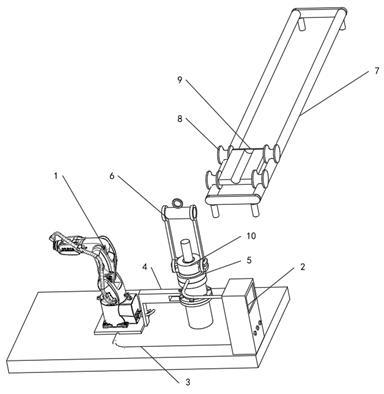
16.图1为本发明的立体图;图2为本发明收纳组件的立体图;图3为本发明六轴机械臂的立体图。
17.图中标记:1、六轴机械臂;2、人工智能控制箱;3、控制传输线缆;4、六轴机械臂安装底座;5、井口压敏传感器;6、吊环;7、收纳架;8、滚轮架;9、安装架;10、吊卡;11、安装槽;12、油管;101、油井管。
具体实施方式
18.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
19.实施例一,参照图1和图3:一种具备人工智能的油田修井无人作业装置,包括:六轴机械臂1,其用于对油管12进行牵引更换,牵引组件,其用于对油管12进行牵引和更换加装,牵引组件包括六轴机械臂1、人工智能控制箱2、控制传输线缆3、六轴机械臂安装底座4、井口压敏传感器5、吊环6、吊卡10、油管12、油井管101与收纳组件,油井管101嵌设于指定工作面,六轴机械臂安装底座4通过螺栓与法兰套设于油井管101的外壁处,六轴机械臂1安装设置于六轴机械臂安装底座4的外壁顶部处,通过六轴机械臂1,可以实现对油管12进行稳定的夹持和月牙锁的开启和关闭,提高更换的效率,降低实际的成本,井口压敏传感器5套设于油井管101的靠近顶端外壁处,通过井口压敏传感器5,可以实时监测吊环6挂着油管12和吊卡10的状态,油管12与油井管101相互匹配,油管12与吊卡10相互匹配,人工智能控制箱2通过控制传输线缆3与六轴机械臂1之间信号连接,人工智能控制箱2通过控制传输线缆3与井口压敏传感器5之间信号连接,通过人工智能控制箱2,用于控制六轴机械臂1和接收井口压敏传感器5的信号,收纳组件处于油井管101的一侧处,吊环6通过伸缩缠绕设置于外部升降装置,吊环6与吊卡10相互匹配,收纳组件包括收纳架7、滚轮架8、安装架9与安装槽11,收纳架7与滚轮架8相互匹配,安装架9通过转轴套设于滚轮架8的外壁处,安装槽11开设于安装架9的外壁处,油管12的顶端通过月牙锁卡接于吊卡10的内壁处。
20.实施例二,参照图1和图3:一种具备人工智能的油田修井无人作业装置的使用方法,包括以下步骤:步骤一、提油管12修井过程的吊卡10搬移,吊环6挂着油管12和吊卡10上行,井口压敏传感器5会发出信号给人工智能控制箱2,人工智能控制箱2则按预设的程序发出控制指令给带电磁抓手的六轴机械臂1,带电磁抓手的六轴机械臂1开始工作,利用其头部电磁抓手将油管12桥架上油管12上的吊卡10解除半月环锁,俩臂协同将油管12上的吊卡10搬移至井口上,待油井管101中的油管12的接箍露出井口后,移动吊卡10,使油井管101中的油管12位于吊卡10内,接箍位于吊卡10上部,然后关闭吊卡10上的月牙锁环锁定油管12,完成吊卡10搬移动作,带电磁抓手的六轴机械臂1归位,步骤二、提油管12修井过程的油管
12下端引导,吊环6携吊卡10及油井管101中的油管12下行,井口位置的油管12接箍卡在吊卡10上,井口压敏传感器5发出信号,井口液压管钳工作,卸扣,井口液压管钳工作完成后,吊环6携吊卡10先上后下,放油管12,带电磁抓手的六轴机械臂1将油管12下端部引导至油管12桥,开始油管12沿引桥的下放过程,动作完成,带电磁抓手的六轴机械臂1归位,步骤二、提油管12修井过程的吊环6摘挂,油管12沿引桥的下放过程结束,带电磁抓手的六轴机械臂1启动工作,电磁抓手钳住油管12桥架上的吊环6,抽掉吊卡10上锁吊环6的插销,摘下管桥架上挂在吊卡10上的吊环6,然后将吊环6搬移至井口的吊卡10耳上,挂入吊卡10,插上位于吊卡10上的吊环6锁销,动作完成,带电磁抓手的六轴机械臂1归位,步骤四、下油管12修井过程的吊环6摘挂,吊环6携吊卡10下放油井管101中的油管12至吊卡10落在井口或封井器法兰,坐实,井口压敏传感器5会发出信号给人工智能控制箱2,人工智能控制箱2则按预设的程序发出控制指令给带电磁抓手的六轴机械臂1,带电磁抓手的六轴机械臂1开始工作,利用其头部电磁抓手钳住吊环6,拔出吊卡10上锁吊环6的锁销,摘下吊环6,俩臂协同将吊环6搬移至管桥架上的吊卡10上,将吊环6挂在吊卡10上,插上吊卡10上的吊环6锁销,动作完成,带电磁抓手的六轴机械臂1归位,步骤五、下油管12修井过程的油管12下端引导,吊环6携吊卡10上行至油管12下端部离开管桥架时,带电磁抓手的六轴机械臂1协同钳住油管12下端部,并通过其上的电磁机械手引导至井口的油管12接箍上,动作完成,带电磁抓手的六轴机械臂1归位,步骤六、下油管12过程的吊卡10搬移,井口液压管钳工作,上扣,井口液压管钳工作完成后,吊环6携吊卡10上行,油管12接箍离开井口吊卡10,这时带电磁抓手的六轴机械臂1启动工作,对油井管101法兰上的吊卡10,打开吊卡10上的锁油管12的月牙锁环,利用其上的电磁机械手握住吊卡10,并将吊卡10搬移至油管12桥上的油管12上,关闭吊卡10上的油管12月牙锁环,锁定油管12,完成动作,带电磁抓手的六轴机械臂1归位。
21.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1