一种软岩巷道智能多孔锚注系统及锚注方法
1.本发明涉及巷道围岩锚注领域,特别涉及一种软岩巷道智能多孔锚注系统及锚注方法。
背景技术:
2.在煤矿、金属矿山等采矿工程软岩巷道支护中,通过锚杆注浆的方式可以充填矿井软岩巷道围岩裂隙,将破碎的岩块胶结加固成整体,提高软岩巷道围岩整体强度,充分提高矿井软岩巷道围岩的自身承载能力,改善支护效果,在涌水量大的巷道中也能起到堵水防渗的作用,当前锚注加固技术作为一种有效提高软岩巷道围岩的承载力和稳定性的加固措施已经十分普遍。
3.随着巷道掘进设备的革新和掘进技术的改进,巷道掘进效率大大提高,但巷道的支护水平却远远跟不上要求,尤其是锚注支护,普遍采用的锚注工艺是将注浆泵与安装到巷道围岩中的注浆锚杆直接连接,在注浆完成后对注浆锚杆进行封堵,然后再对下一个待注浆的注浆锚杆进行注浆作业。
4.现有的锚注工艺存在以下问题:
①
缺乏对注浆作业中浆液扩散范围的准确识别,无法实现对浆液扩散的准确标定;
②
采用低流量注浆泵单孔施工,速度慢、效率低;
③
注浆过程的控制方法繁琐,无法实现对注浆参数的动态调整,操作中往往造成缺注、漏注,达不到注浆质量要求;
④
大量人员和设备同时作业,造成人员和设备占用,影响工程施工进展。
技术实现要素:
5.本发明的目的,是提供一种软岩巷道智能多孔锚注系统及锚注方法,实现注浆作业过程中对浆液扩散范围的准确识别,简化操作流程,提高注浆质量和效率,使注浆作业的控制过程简易化。
6.为实现上述发明的目的,本发明提供的解决方案如下:一种软岩巷道智能多孔锚注系统,其特征在于,包括:注浆机构,所述注浆机构能够对软岩层进行多孔注浆作业;浆液扩散监测系统,所述浆液扩散监测系统能够获取浆液在软岩层中的扩散状态信息,所述浆液扩散监测系统通过信号线向所述计算机进行信号传输;注浆智能控制装置,所述注浆智能控制装置能够采集所述注浆机构内的浆液运行数据并控制浆液运行状态,通过信号线向所述计算机传输数据并接收计算机传输的锚注操作作业指令;和计算机,所述计算机内设置运算程序,能够通过逻辑分析运算所述注浆机构内的浆液运行状态和浆液在软岩层中的扩散状态信息,并形成锚注操作作业指令下达给注浆智能控制装置,进而控制注浆机构进行锚注作业。
7.进一步的,所述注浆机构包括拌浆桶,贮浆桶,注浆泵,浆液分流装置和不少于一个的注浆锚杆,所述拌浆桶,贮浆桶,注浆泵和浆液分流装置通过注浆管路顺次连接,所述浆液分流装置通过注浆管路连接注浆锚杆,所述注浆泵与所述浆液分流装置之间设有入浆阀,所述注浆管路上设有压力调节阀和出浆阀。
8.进一步的,所述注浆机构还包括回浆管路和泄浆管路,所述回浆管路连接所述拌浆桶和所述浆液分流装置;所述泄浆管路设置于所述注浆管路靠近注浆锚杆的位置,所述回浆管路设有回浆阀,所述泄浆管路设有泄浆阀。
9.进一步的,所述注浆管路位于注浆泵之后还设有增压泵。
10.进一步的,所述注浆智能控制装置包括控制模块、数据传输模块和浆液信息采集模块;所述控制模块用于控制注浆机构中各执行元件的启停,进而控制注浆的压力、流量;所述浆液信息采集模块用于采集注浆机构浆液的压力信息和流量信息,所述数据传输模块用于将浆液信息采集模块采集的信息传输至计算机。
11.进一步的,所述控制模块包括注浆泵控制模块、增压泵控制模块、回浆阀控制模块、泄压阀控制模块、入浆阀控制模块、压力调节阀控制模块和和出浆阀控制模块。
12.进一步的,所述浆液信息采集模块包括用于采集注浆管路压力信息的注浆压力传感器,用于采集注浆管路流量信息的注浆流量传感器,以及用于采集浆液分流装置的浆液压力信息的储浆压力传感器。
13.进一步的,所述浆液扩散监测系统包括电法监测装置和微震监测装置,所述电法监测装置通过岩体与浆液视电阻率的不同测量岩体内浆液的有效扩散范围和扩散方向;所述微震监测装置能够通过裂隙岩体中浆液扩散时劈裂现象的能量释放信号识别岩体内浆液的有效扩散路径范围。
14.进一步的,所述微震监测装置包括微震检波器、数据分站和地下监测主机;将同时进行注浆的多个注浆锚杆为一组,微震检波器布置在每组注浆锚杆的两端,所述微震检波器、数据分站、地下监测主机相互之间通过信号线连接,所述地下监测主机通过信号线连接计算机。
15.进一步的,所述电法监测装置包括通过信号线相互连接的电法采集主机、供电电极和测量电极;所述供电电极布置在需要进行锚注的巷道两端,所述测量电极布置在每组注浆锚杆的两端;所述电法采集主机通过信号线连接计算机。
16.一种软岩巷道智能多孔锚注系统的锚注方法,包括以下步骤:步骤一:根据矿井软岩巷道地质条件以及每组注浆锚杆位置,在多孔锚注施工前布置微震监测装置和电法监测装置,并按照设计工艺将矿井软岩巷道智能多孔锚注系统安装到位满足工程要求;初设注浆压力p0、初设注浆流量v0和预设浆液扩散范围r0;步骤二:通过计算机向注浆智能控制装置下达作业指令,启动注浆泵和增压泵,打开入浆阀,关闭压力调节阀,出浆阀,泄浆阀和回浆阀,将贮浆桶中的浆液输送至浆液分流装置中,浆液分流装置内的浆液高度超过最上层的出浆孔高度时,打开压力调节阀和出浆阀,通过注浆管路输送浆液至注浆锚杆向钻孔内注浆,注浆压力传感器、注浆流量传感器和储浆压力传感器实时采集注浆管路内的注浆信息和浆液分流装置内的压力信息,注浆智能控制装置实时将采集的浆液状态数据通过信号线传输至计算机;步骤三:利用微震监测装置实时获取的能量波形数据,并对其进行滤波处理,确定微震事件参数包括:微震事件的数目、每个微震事件的空间定位、每个微震事件的震源参数、每个微震事件发生的时间,通过微震事件参数分析,将注浆时的能量大于一定值的微震事件相连获得注浆微震劈裂范围r1,从而确定浆液的有效扩散路径范围;同时利用电法监测装置获得注浆范围内视电阻率图像,通过电法监测装置分析注浆范围内视电阻率图像,
选取电阻率小于一定值的电阻率图像范围r2,确定浆液的有效扩散范围和扩散方向;步骤四:计算机将获取的所述注浆微震劈裂范围r
1、
电阻率图像范围r2结合注浆压力传感器、注浆流量传感器信息进行判断:当r0>min{r1,r2},而其所连接注浆管路上的流量传感器信息不再变化且注浆压力传感器信息数值达到初设注浆压力p0时,计算机控制注浆智能控制装置自动调节压力调节阀提高注浆压力,进行增压注浆;当r0≤min{r1,r2}时,则认为浆液已在相当程度上或在一定范围的岩层内部强制贯通堵塞裂隙,计算机控制注浆智能控制装置自动调节压力调节阀降低注浆压力至初设注浆压力p0,直至注浆流量传感器采集到的注浆流量明显降低或注不进浆时,停止注浆锚杆注浆工作;步骤五:当一组注浆锚杆注浆工作完成后,对各个注浆管路进行泄浆,待泄浆完毕后,将注浆管路与注浆锚杆拆离,用注浆泵泵送清水,打开所有阀,进行装置的清洗。
17.本发明的有益效果:1、通过对注浆工程中浆液扩散的准确识别,对注浆参数进行动态调整,使注浆作业达到预期的效果,减少浆材浪费,降低成本,保证注浆工程的安全和高效。
18.2、本发明的多孔锚注系统,实现了一至多根注浆锚杆同时连续注浆的作业模式,具有优异的注浆效果,操作简单,工序搭接紧密,循环周期短,避免了人员和设备占用的问题,节省了施工时间,提高了施工效率。
19.3、本发明的多孔锚注系统采用集中智能调整,根据浆液监测和压力传感器、流量传感器信息变化,实现对注浆压力、流量的智能调整,提高注浆效率,扩大浆液扩散半径,提高裂隙填充率,改善注浆效果,减少劳动量。
附图说明
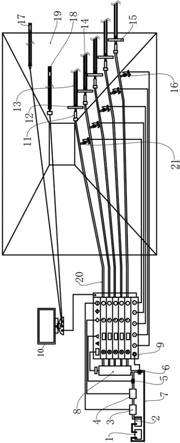
20.图1为矿井软岩巷道智能多孔锚注系统示意图;图2为浆液分流装置、注浆智能控制装置结构示意图;图3为注浆智能控制装置与各执行元件结构示意图;图4为微震监测装置和电法监测装置布置示意图;图5为一种软岩巷道智能多孔锚注系统的锚注方法的流程图。
21.图中:1-拌浆桶;2-贮浆桶;3-注浆泵;4-增压泵;5-入浆阀;6-回浆阀;7-回浆管路;8-浆液分流装置;9-注浆智能控制装置;911-泄浆阀控制模块;912-入浆阀控制模块;913-增压泵控制模块;914-注浆泵控制模块;915-压力调节阀控制模块;916-回浆阀控制模块;917-出浆阀控制模块;921-注浆流量传感器;922-注浆压力传感器;923-储浆压力传感器;93-数据传输模块;10-计算机;11-连接头;12-止浆塞;13-钻孔;14-注浆锚杆;15-托盘;16-泄浆阀;17-电法监测装置;171-供电电极a;172-供电电极b;173-测量电极m;174-测量电极n;175-电法采集主机;18-微震监测装置;181-地下监测主机;182-数据分站;183-微震检波器;19-巷道;20-注浆管路;21-泄浆管路;22-出浆阀;23-压力调节阀。
具体实施方式
22.下面将参照附图更详细地描述本发明的具体实施例。虽然附图中显示了本发明的
具体实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
23.需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名词的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定于”。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明书的一般原则为目的,并非用以限定本发明的范围。本发明的保护范围当视所附权利要求所界定者为准。
24.为便于对本发明实施例的理解,下面将结合附图以几个具体实施例为例做进一步的解释说明,且各个附图并不构成对本发明实施例的限定。
25.如图1至图3所示,一种软岩巷道智能多孔锚注系统的一种实施式,包括注浆机构,浆液扩散监测系统,注浆智能控制装置和计算机。
26.所述注浆机构包括拌浆桶1,贮浆桶2,注浆泵3,增压泵4,入浆阀5,浆液分流装置8,注浆管路20和注浆锚杆14。
27.注浆需要的原材料在所述拌浆桶1内搅拌加工形成浆液,浆液通过管道输送到所述贮浆桶2,所述注浆泵3将所述贮浆桶1内的浆液通过管道输送至所述浆液分流装置8,所述注浆泵3和所述浆液分流装置8之间的管道形成入浆管路,入浆管路优选与所述浆液分流装置的底部固定连接,所述入浆管路上设有增压泵4和入浆阀5,用于控制浆液在管道中的流通。
28.所述浆液分流装置8使用耐高压透明材质制作,桶壁上标有刻度,能够显示桶内浆液的高度和体积,所述浆液分流装置8的侧壁开设有多个出浆孔。
29.所述注浆管路20的一端与所述出浆孔固定连接,另一端与注浆锚杆14可拆卸连接。所述注浆锚杆14的主体部位于钻孔内,钻孔内安装止浆塞12进行浆液封堵,注浆锚杆14通过托盘15以及螺母与围岩固定连接,注浆锚杆14的外端通过连接头与注浆管路20连接。所述注浆管路20与所述注浆锚杆14的注浆接头的连接方式优选螺纹连接,连接处设置密封环。所述注浆管路20上设有压力调节阀23,出浆阀22和泄浆管路21,所述压力调节阀23和出浆阀22靠近浆液分流装置8设置,所述泄浆管路21靠近注浆锚杆14设置,所述泄浆管路21上设有泄浆阀16。
30.为调节注浆过程中浆液分流装置8内的压力,避免高压强带来的危害,同时便于注浆结束后残余浆液的回收以及浆液分流装置8的清洗,在所述浆液分流装置8和所述拌浆桶1之间设有回浆管路7,所述回浆管路7上安装有回浆阀6。
31.为简化描述,与所述出浆孔通过所述注浆管路一一对应连接的多个注浆锚杆为一组,下文中简称为每组注浆锚杆。
32.如图4所示,所述浆液扩散监测系统包括电法监测装置17和微震监测装置18。
33.所述电法监测装置17包括电法采集主机175,供电电极和测量电极,所述供电电极和测量电极通过信号线与所述电法采集主机175连接,所述电法采集主机175给所述供电电极提供电能,所述电法采集主机175通过信号线与所述计算机10连接。
34.所述供电电极包括供电电极a171和供电电极b172,所述供电电极a171和供电电极b172分别埋于软岩巷道两端的软岩层内,并远离所述注浆锚杆的注浆作业区域;所述测量电极包括测量电极m173和测量电极n174,所述测量电极m173和测量电极n174埋于软岩巷道的软岩层内,分别设置在每组注浆锚杆的两侧,使每组注浆锚杆的注浆作业区域位于所述测量电极m173和测量电极n174之间。
35.注浆后的软岩层由不同的岩石、矿体、浆体等组成,它们在软岩层内具有不同的导电性、介电性等电学性质,所述电法监测装置能够通过所述供电电极和所述测量电极收集浆液在软岩层内的导电性,通过所述电法采集主机175转换为视电阻率信号,所述电法采集主机175通过信号线将转换后的视电阻率信号传输给计算机10,所述计算机内安装有运算软件,能够生成软岩层视电阻率图。
36.按照电阻率法原理,软岩层视电阻率的高低和有无注浆及注浆效果的优劣密切相关,未注浆地段软岩层的视电阻率整体偏低,注浆地段软岩层的视电阻率整体增高,并且注浆封堵裂隙加固围岩的效果越好视电阻率越高,通过计算机显示的视电阻率图能够准确判断浆液在软岩层内的扩散范围和扩散方向。
37.所述微震监测装置18包括微震检波器183、数据分站182和地下监测主机181,所述微震检波器183通过信号线与所述数据分站182连接,所述数据分站182通过信号线与所述地下监测主机181连接,所述地下监测主机181通过信号线与所述计算机10连接。
38.所述微震检波器183埋于软岩巷道的软岩层内,分别设置在每组注浆锚杆的两侧,使每组注浆锚杆的注浆作业区域位于所述微震检波器183之间。所述数据分站182设置于软岩巷道的软岩体表面,能够实时接收所述微震检波器183传输的能量数据并通过信号线传输给所述地下监测主机181。所述地下监测主机181设置于软岩巷道的软岩体表面,能够接收所述数据分站传递的能量数据并转换为能量波型数据,并通过信号线传输给计算机。
39.所述计算机10内安装有运算软件,能够将接收到的能量波形数据输出为微震事件参数,包括微震事件的数目,每个微震事件的空间定位,每个微震事件的震源参数和每个微震事件发生的时间。
40.微震监测通过观测、分析生产活动中产生的微小地震事件,来监测其对生产活动的影响、效果及地下状态,当软岩层内的岩石和矿体由于浆液扩散而发生劈裂、移动时会产生一种微弱的地震波向周围传播,通过在破裂区周围的空间内布置微震检波器并实时采集微震数据,经过计算机运算软件数据处理后输出微震事件参数,并形成三维空间图,能够准确识别浆液在软岩层内的扩散路径和扩散范围。
41.如图2和图3所示,所述注浆智能控制装置9包括控制模块、数据传输模块93和浆液信息采集模块;所述控制模块用于控制注浆机构中各执行元件的启停,进而控制注浆的压力、流量;所述浆液信息采集模块用于采集注浆机构浆液的压力信息和流量信息,所述数据传输模块93用于将浆液信息采集模块采集的信息传输至计算机10。
42.所述浆液状态采集模块具体包括设置于所述注浆管路20上的注浆流量传感器921、注浆压力传感器922,和设置于所述浆液分流装置8上部的储浆压力传感器923。
43.如图2所示,所述控制模块包括注浆泵控制模块914、增压泵控制模块913、回浆阀控制模块916、泄压阀控制模块911、入浆阀控制模块912、压力调节阀控制模块915和出浆阀控制模块917。所述的注浆泵控制模块914通过信号线连接注浆泵3,增压泵控制模块913通
过信号线连接增压泵4,回浆阀控制模块916通过信号线连接回浆阀6,泄压阀控制模块911通过信号线连接连接泄浆阀16,入浆阀控制模块912通过信号线连接连接入浆阀5,压力调节阀控制模块915通过信号线连接压力调节阀23,出浆阀控制模块917通过信号线连接连接出浆阀22。
44.所述注浆智能控制装置9通过信号线与计算机10连接,能够将所述浆液状态采集模块收集的浆液状态信息传输至计算机。所述计算机内预设运行程序,能够分析处理所述注浆智能控制装置传输的浆液状态信息,和所述浆液扩散监测系统传输的浆液在软岩层内的扩散状态信息。经过预先设定的逻辑运算程序,计算机通过信号线向所述注浆智能控制装置传输注浆作业指令,所述注浆智能控制装置接收来自计算机的注浆作业指令后,操控本发明所述的多孔锚注系统的注浆作业,通过程序化计算操控注浆参数,减少人为失误。
45.如图5所示,采用上述实施方式的注浆方法包括以下步骤:s1, 锚注施工作业前,安装锚注系统、微震监测装置和电法监测装置,初设注浆压力p0、初设注浆流量v0和预设浆液扩散范围r0。
46.s2,通过计算机向注浆智能控制装置下达作业指令,启动注浆泵3和增压泵4,打开入浆阀5,关闭压力调节阀23,出浆阀22,泄浆阀16和回浆阀6,将贮浆桶2中的浆液输送至浆液分流装置8中,浆液分流装置8内的浆液高度超过最上层的出浆孔高度时,打开压力调节阀23和出浆阀22,通过注浆管路20输送浆液至注浆锚杆14向钻孔内注浆,注浆压力传感器922、注浆流量传感器921和储浆压力传感器923实时采集注浆管路内的注浆信息和浆液分流装置内的压力信息,注浆智能控制装置实时将采集的浆液状态数据通过信号线传输至计算机10。
47.s3,微震监测装置实时获取注浆区域能量数据,传输至计算机运算输出微震事件参数,设定微震事件最小能量数值,在计算机中将能量数值大于最小能量数值的微震事件相连,获得注浆微震劈裂范围r1;电法监测装置实时获取注浆区域电阻率数据,传输至计算机运算输出视电阻率图,设定视电阻率的最大数值,在计算机中选取电阻率小于视电阻率的最大数值的电阻率图像范围r2。
48.当r0>min{r1,r2},并且浆液状态采集模块监测注浆流量传感器921采集到的数值不再变化,注浆压力传感器922信息数值达到初设注浆压力p0时,计算机向注浆智能控制装置下达作业指令,阀控制模块自动调节压力调节阀23,增大注浆压力,进行增压注浆;当r0≤min{r1,r2},计算机向注浆智能控制装置下达作业指令,压力调节阀控制模块915自动调节压力调节阀23,降低注浆压力至初设注浆压力p0,当注浆流量传感器921采集到的数值明显降低或数值为0时,计算机向注浆智能控制装置下达作业指令,自动关闭压力调节阀23、出浆阀22、入浆阀5、注浆泵3和增压泵4,停止注浆作业。
49.s4,每组注浆锚杆的注浆作业完成后,计算机向注浆智能控制装置下达作业指令,自动打开泄浆阀16对注浆管路20进行泄浆,泄浆完毕后,将注浆管路20与注浆锚杆拆离,开启注浆泵3并泵送清水,打开本发明所述的多孔锚注系统中的所有阀,进行多孔锚注系统清洗。
50.s5,在软岩巷道内顺序设置下一组注浆锚杆,重复步骤s2-s6,进行下一组注浆作业。
51.本实施例中,所述入浆管路、回浆管路、注浆管路和泄浆管路均由高压胶管特制而
成;注浆锚杆可使用注浆锚索替代,其作用相同。
52.所述注浆锚杆优选长度为2.6m,直径为25mm,注浆锚杆之间的间排距优选为1600
×
1600mm。
53.所述浆液分流装置的出浆孔优选设置为5个,沿巷道掘进方向取同间距的5根注浆锚杆为一组,每组注浆锚杆总宽度为6.4m。
54.所述电法监测装置的测量电极m,测量电极n和所述微震监测装置的微震检波器,距离所述每组注浆锚杆的距离为0.6m-1.0m,优选为0.8m。
55.本发明所描述的多孔锚注系统中,注浆智能控制装置可以使用plc编程操控技术,该技术为电气自动化控制的普遍技术,本文中不再描述其运作原理;计算机内预设的微震监测程序和电法监测程序以及逻辑运算程序是已经成熟的计算机编程语言,本文中不再描述其编程运作原理。
56.本实施例结合现场施工实际情况,进一步对矿井软岩巷道智能多孔锚注系统的结构以及使用该系统进行矿井软岩巷道多孔锚注方法进行说明。
57.施工注浆锚杆,注浆锚杆长度为2.6m,直径25mm,间排距为1600
×
1600mm,沿巷道掘进方向取同间距的5根注浆锚杆为一组,每组注浆锚杆14总长度为6.4m,在距每组注浆锚杆两端0.8m布置微震监测装置和电法监测装置,确定初设注浆压力为3mpa、初设注浆流量为150l/min,预设浆液扩散范围r0=1.6
×
8.0m。通过计算机控制注浆智能控制装置启动注浆泵3、增压泵4、入浆阀5和出浆阀22,将贮浆桶2中的浆液输送至浆液分流装置中,再通过注浆智能控制装置输送至一组注浆锚杆进行注浆。储浆压力传感器923、注浆压力传感器922、注浆流量传感器921即时将浆液分流装置8内的压力信息、注浆管路的压力信息以及注浆流量信息传至注浆智能控制装置,并传输到计算机10中,同时利用微震监测装置18和电法监测装置17将注浆锚杆浆液扩散情况,并传输到计算机中。在计算机中设定微震事件采集最小能量为1.0
×
103j,电法监测装置视电阻率图像范围采集最大电阻率为100ω
·
m,通过计算机将注浆微震劈裂范围r1、电阻率图像范围r2与预设浆液扩散范围r0进行比较,当r0>min{r1,r2},并且其所连接注浆管路上的注浆流量传感器921信息不再变化且注浆压力传感器922信息数值达到初设注浆压力3mpa时,计算机控制注浆智能控制装置自动调节压力调节阀提高注浆压力,进行增压注浆,当r0≤min{r1,r2}时,则认为浆液已在相当程度上或在一定范围的岩层内部强制贯通堵塞裂隙,计算机控制注浆智能控制装置自动调节压力调节阀降低注浆压力至初设注浆压力值3mpa,直至流量传感器采集到的注浆流量明显降低或注不进浆时,停止注浆工作,对各个管路进行泄浆,待泄浆完毕后,将注浆管路与注浆锚杆拆离,用注浆泵泵送清水,打开所有阀门,进行装置的清洗。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1