双模盾构施工引起地表沉降五维空间效应试验及监测系统
1.本发明属于盾构模型技术领域,具体涉及一种盾构施工引起地表沉降“五维”空间效应试验系统和方法。
背景技术:
2.盾构机设备主要分为掘进硬岩区间的全断面硬岩隧道掘进机(tbm),掘进软岩区间的土压平衡盾构机(epb),以及复杂地层条件下的双模盾构施工。然而无论是tbm法epb法或者是双模盾构法施工,在其施工过程中都有共同的特点,即存在盾构机推进过程、管片安装过程。分析这两种具体工况可知,盾构机的推进过程会对地层土体产生扰动,例如某轨道交通线,采用的盾构推进步长为1.5m,不可避免的造成地表沉降。而在每步推进完成后的管片安装阶段,一般要停机40分钟左右,这段时间内地表沉降现象仍然在持续发生。
3.归纳上述具体工程情况,随着盾构隧道的不断掘进,地表会发生沉降现象,地表沉降不仅在x、y、z三个维度上展布,而且还随盾构隧道掘进步长(l)和时间(t)两个维度发生不断的演化。因此,将其定义为盾构隧道施工引起地表沉降的“五维”空间效应。
4.目前大多采用有限元软件或peck公式对地表沉降的总量进行预测,其中有限元计算需要建立准确的模型,而真实的地层环境中各层岩的物理性质千变万化,所以建模会有很大的困难,peck公式是一种简单的计算地表沉降的方法,其中有很多假定,因而计算结果会有很大误差。
5.传统的模型试验系统或方法,因为需要对原型进行简化,而且在相似材料、边界条件、测试设备的尺寸效应以及固结排水等方面均受限制,所以一般只能做定性的研究,难以准确的反应引起地表沉降的“五维”效应,对研究地表沉降槽的演化规律具有较大限制,在试验成果向原型转化以及直接用于施工控制等方面存在较大困难。
技术实现要素:
6.本发明针对现有技术的缺陷,提出一种双模盾构施工引起地表沉降五维空间效应试验及监测系统,通过对盾构机模型进行设计,以最大程度的模拟原型盾构机施工地表沉降情况,通过直观的观察沉降规律,并根据观测数据对实际工程的盾构机施工,地面建筑物及地下管线保护等提供指导。
7.本发明是采用以下的技术方案实现的:一种双模盾构施工引起地表沉降五维空间效应试验及监测系统,包括试验模型箱、试验监测系统和盾构机模型装置,所述模型试验箱用以模拟实际施工地质条件;
8.所述盾构机模型采用双盾体模式,包括嵌套的内盾体和外盾体,以及推力杆、顶推装置和渣土吸尘器,外盾体前部为局部镂空区,内盾体和外盾体之间设置类牛腿构件,推力杆的一端固定在类牛腿构件上,另一端与顶推装置相连,顶推装置同时连接至渣土吸尘器,渣土吸尘器置于一电子秤上;不仅可以准确的得知模型盾构机推进过程中所产生的地层损失情况,同样也可以实现在模型盾构机推进过程中对地层损失进行精准控制,更好的模拟
不同地层损失情况下,地表的移动规律;
9.盾构机模型的前部设置有附带刀具的刀盘,刀盘通过扭矩杆与转动电机相连,转动电机与交流电源相连,通过转动电机的旋转带动扭矩杆,从而带动刀盘旋转切削土体。
10.进一步的,所述试验模型箱包括一上部开口的箱体,在箱体内模拟相似地层,箱体的侧面采用钢化玻璃板,箱体的底部采用钢板,相邻钢化玻璃板之间通过双肢角钢连接,并通过密封胶提高密封性。
11.进一步的,所述试验监测系统采用三维激光扫描仪,以监测地表沉降,并通过模型盾构机模拟盾构连续推进过程,以进行步长维度的监测,采用计时器配合盾构机停机工况以及完全推进完成工况,通过这两种工况实现对于时间维度的监测,实现本专利所说的五维监测,在试验模型箱的模拟地层的表面布设多个地表监测点,并在地表观测点上设置地表监测探针,地表监测点纵横向均布设,起始点和终止点与远离模型箱边界,且不受边界条件影响,通过三维激光扫描仪监测地表监测探针针尖位移以实现其在x和y方向的在线监测,x方向为隧道横向,y方向为隧道纵向。
12.进一步的,所述推力杆内部中空,且在靠近类牛腿构件一端的侧壁上设置孔洞。
13.进一步的,所述推力杆位于内盾体和外盾体之间,沿着圆周方向均匀设置有多个。
14.进一步的,所述内盾体和外盾体之间还设置有支撑推力杆的防失稳三角撑,相邻三角撑的支撑间距为盾构机模型长度的
15.进一步的,所述镂空区的镂空范围为盾构机模型长度的至
16.进一步的,在盾构机模型前端至位置处设置挡渣板,挡渣板设置在内盾体和外盾体之间,且位于局部镂空区的后方,挡渣板前方空间形成一密封空间。
17.进一步的,所述钢化玻璃板四周进行抛光打磨处理,并在内表面放置光滑的铝纸,铝纸表面均匀涂抹凡士林,减少模型箱与相似材料的摩擦影响。
18.进一步的,所述相似材料采用包括石英砂、云母、重晶石粉、河砂、水泥进行地层岩体材料的模拟,使其与实际地层情况相似,地层模型采用分层浇筑并进行人工振捣压实。
19.与现有技术相比,本发明的优点和积极效果在于:
20.本方案主要对盾构机模型进行研究设计,通过嵌套的内盾体和外盾体,结合推力杆的设计模拟实际施工掘进过程,并通过相似材料模拟技术对盾构施工引起的地表沉降效应进行五个维度上的物理模拟,为揭示和分析盾构隧道施工造成地表沉降的空间、时间特性,确定地表沉降在盾构步长影响下以及时间效应影响下的演化规律提供技术支持。
附图说明
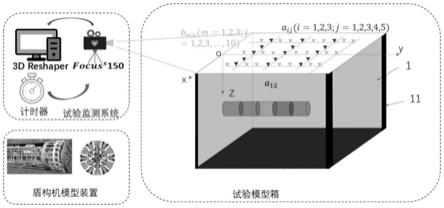
21.图1为本发明实施例盾构隧道施工造成地表沉降的五维效应相似模拟试验系统示意图;
22.图2为本发明实施例纵向沉降监测点平面布置图;
23.图3为本发明实施例横向沉降监测点平面布置示意图;
24.图4为本发明实施例三维扫描精度试验布置示意图;
25.图5为本发明实施例隧道施工模拟试验盾构开挖设备精确控制系统示意图;
26.图6为本发明实施例盾构机模型推力杆布置示意图;
27.图7为本发明实施例盾构机推进模型装置结构示意图;
28.图8为本发明实施例盾构机模型推力杆防失稳装置示意图;
29.图9为本发明实施例模型箱正视图地表监测探针示意图;
30.其中,1、箱体;2、内盾体;3、外盾体;31、局部镂空区;4、类牛腿构件;41、嵌入孔;5、推力杆;6、顶推装置;7、渣土吸尘器;8、电子秤;9、三角撑;10、刀盘;11、双肢角钢;12、扭矩杆;13、转动电机;14、交流电源;15、挡渣板。
具体实施方式
31.为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图及实施例对本发明做进一步说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用不同于在此描述的其他方式来实施,因此,本发明并不限于下面公开的具体实施例。
32.实施例1、本实施例提出一种双模盾构施工引起地表沉降五维空间效应试验及监测系统,如图1所示,包括试验模型箱、试验监测系统和盾构机模型装置;
33.所述试验模型箱包括一上部开口的箱体1,在箱体内模拟相似地层,箱体的侧面采用钢化玻璃板,箱体的底部采用钢板,相邻钢化玻璃板之间通过双肢角钢11连接,并通过通过添加硅酮结构密封胶提高密封性,以防止漏砂,漏水。其中,双肢角钢11的型号需要满足钢化玻璃板抗弯刚度的要求,尽量减少因钢化玻璃板挠曲造成的地表点的位移,本实施例优选采用等边角钢型号20mmx20mmx3mm,具体可根据实际情况适度加大等边角钢型号。
34.另外,试验模型箱边界条件除保证侧向位移为0外,还应保证剪切应力为0,本实施例对钢化玻璃板四周进行抛光打磨处理,并在表面内放置光滑的铝纸,使用时在铝纸表面均匀涂抹凡士林,减少模型箱与相似材料的摩擦影响。
35.本实施例在根据模型三维图制作模型的外边框在对试验模型箱内进行地层的相似模拟设计时,本试验系统采用石英砂、云母、重晶石粉、河砂、水泥等材料进行地层岩体材料的模拟,使其与实际地层情况相似,地层模型采用分层浇筑并进行人工振捣压实。
36.所述试验监测系统采用三维激光扫描仪,试验主要监测地表沉降,在试验模型箱的模拟地层的表面布设多个地表监测点,地表监测点设置要保证纵横向均布设,且不受边界条件影响,并保证起始点和终止点离模型箱边界较远,地表监测点布设如图2和图3所示,本实施例以纵向布设3行,横向布设3行为例进行说明,具体实施时,可根据具体的实验室场地要求进行布置。
37.具体内容为地表横向沉降监测点设置三排编号a
i,j
纵向监测点设置三排编号b
m,n
,用以观测地表沉降槽在横纵像演化规律,并在地表观测点上设置地表监测探针装置,具体如图9所示,其中,m为地表监测点探针在地表变形后的状态,n为地表监测点探针在地表变形前的状态,通过三维激光扫描仪监测针尖位移可以实现其在x和y方向的在线监测,通过探针的长度可以实现以下三个功能,其一,将x、y方向的位移效果与地表倾角造成的位移效果耦合,然后通过公式δy=δy
测-lsinθ去除倾角造成的位移,其中,θ为移动后指针的位置与垂直方向的夹角,且此角度与地表移动产生的倾角相等,l为探针长度,即可以反求真实位移(x方向为隧道横向,y方向为隧道纵向)。其二,对探针的测量相较于对地表点的测量,
更为容易,探针可以起到标识作用,其三,可以准确的反应地表倾角的变化的规律,这对于五维理论的进一步丰富和发展,是一个至关重要的量。
38.在对三维激光扫描仪的分辨率确定时,先进行不同分辨率下扫描仪的测量精度研究,本实施例使用focuss150扫描仪进行精度试验,分别在墙面黏贴0.16mx0.12m的四个平面靶纸,如图4所示。其次用全站仪测得ab、bc、bd距离,然后在据墙面10、20、30、40、50m分别设站扫描,每一站采用两种分辨率,即仪器默认分辨率4x1/4和高精度分辨率2x1/2,每种分辨率下扫描五次,并分别绘制不同分辨率下ab、bc、bd的测距中误差曲线。通过拟合中误差曲线对比仪器误差范围,选择适合试验方案的分辨率。一般情况下,在同一分辨率下扫描,扫描距离越近,测量中误差越小,扫描精度越高,对于相同扫描距离,分辨率越高,测量中误差越小,扫描精度越高。
39.如图5和图6所示,本实施例提出的盾构机模型采用双盾体模式,包括嵌套的内盾体2和外盾体3,内盾体2、外盾体3均由强度和刚度满足盾构机掘进要求的冷弯薄壁钢板弯曲制成。外盾体3设置为盾构机前部一定范围内镂空(外盾体3前部为局部镂空区31),优选镂空范围为盾构机模型长度的至内盾体2不设置镂空,全范围封闭,外盾体3设置镂空的目的在于模拟真实盾构施工过程中的地层损失。试验进行过程中,上覆土体受到扰动,部分土体可以通过盾构机外盾体3的镂空进入内盾体2。
40.另外,在盾构机模型前端至位置处设置密闭挡渣板15,挡渣板15设置在内盾体2和外盾体3之间,且位于局部镂空区31的后方,密闭挡渣板15的作用为:第一防止前端渣土漏至后端,以较好的模拟推进过程带来的沉降,方便土体损失的量测,第二提供密闭空间能有效提升渣土吸尘器的吸渣能力。
41.继续参考图5和图6,内盾体2和外盾体3之间设置类牛腿构件4,其焊接在盾构机外盾体3的内侧,类牛腿构件4如图6所示,中间设置嵌入孔41,嵌入孔41用于固定金属推力杆5,推力杆5内部中空,且在靠近类牛腿构件4一端的侧壁上设置孔洞;推力杆5位于内盾体2和外盾体3之间,沿着圆周四个方向每90度设置一个,推力杆5的另一端与顶推装置6相连,顶推装置6同时连接至渣土吸尘器7,以保证盾构机掘进时推力的均匀,避免造成盾构机掘进偏离预定轨迹。
42.其中,推力杆5有两个功能,一方面通过与外部顶推装置6相连,为盾构机的掘进提供向前的推力,一方面推力杆5端部同时与渣土吸尘器7相连,可以及时通过金属推力杆5前部孔洞,将内外盾体之间的渣土通过渣土吸尘器7吸出,渣土吸尘器7置于电子秤8上,通过电子秤8的示数可以精确的控制盾构推进每环的地层损失率,同时也可以起到及时排除内外盾体间渣土的功能,避免在推进若干环后,内外盾体间被土体塞满,造成后续的地层损失无法模拟。
43.特别的,因为此盾构机模型推力的施加依靠四根带有孔洞的金属推力杆5进行,为防止推进力受到压力过大而出现欧拉屈服,在盾体内设置金属推力杆5的防失稳三角撑9,如图8所示,三角撑9的支撑间距取盾构机模型长度的
44.盾构机前部设置能旋转的刀盘10,刀盘10上面附带刀具,刀盘10的旋转切削土体依靠扭矩杆实现,盾构机刀盘与扭矩杆12焊接,扭矩杆12端部与转动电机13相连,转动电机
13与交流电源14相连,通过转动电机13的旋转带动扭矩杆12,从而带动刀盘10旋转切削土体。
45.综上可知,本实施例设计试验系统,对盾构机、地层等进行模拟设计,并布设地表监测点对地表沉降进行模拟,可以有效直观的观察盾构机推进过程中地表的沉降规律,不仅可以验证随机介质理论、peck公式等地表沉降理论,而且对工程中盾构隧道施工风险评价、地铁隧道施工地表沉降科学防范与有效控制措施等工作有很大的帮助。
46.以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1