一种三探头方位伽马处理方法及系统与流程
1.本发明涉及石油随钻测井领域,特别涉及一种三探头方位伽马处理方法及系统。
背景技术:
2.近年来老井侧钻井业务量增加,而针对老井侧钻所需要的小钻具、小螺杆、小径仪器及相应的特殊工具市场供应不够。针对老井侧钻水平井研发小尺寸方位伽马工具,提高储层钻遇率,避开钻遇泥岩减少钻遇泥岩带来的井下复杂情况,提高开发效率与效益,增强市场竞争力。
3.现有方位伽马处理方法在滑动钻进中,由于钻杆器不转动,常规的方位伽马传感仪器无法实现分区。
技术实现要素:
4.基于此,本技术实施例提供了一种三探头方位伽马处理方法及系统,能够在滑动钻进中实现伽马分区,解决了常规方位伽马仪器在滑动钻进时无法分区的缺点,在小井眼作业中,提高储层钻遇率和开发效率。
5.第一方面,提供了一种三探头方位伽马处理方法,该方法包括:
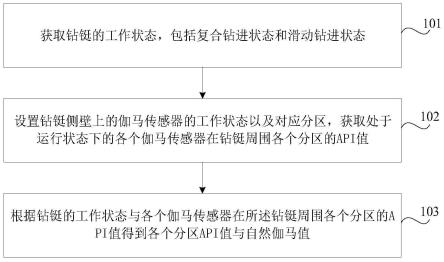
6.获取钻铤的工作状态,所述工作状态包括复合钻进状态和滑动钻进状态;
7.设置所述钻铤侧壁上的伽马传感器的工作状态以及对应分区,获取处于运行状态下的各个伽马传感器在所述钻铤周围各个分区的api值;
8.根据钻铤的工作状态与各个伽马传感器在所述钻铤周围各个分区的api值得到各个分区api值与自然伽马值。
9.可选地,所述复合钻进状态为所述钻铤工作时的自转周期大于每分钟3圈;
10.所述滑动钻进状态为所述钻铤工作时的自转周期小于每分钟3圈。
11.可选地,所述设置所述钻铤侧壁上的伽马传感器的工作状态以及对应分区,包括:
12.所述钻铤周围水平面设置为等分的2、4或8个分区。
13.可选地,所述设置所述钻铤侧壁上的伽马传感器的工作状态以及对应分区,包括:
14.所述钻铤侧壁设置有3个伽马传感器,每两个伽马传感器之间水平间隔120
°
。
15.可选地,当3个伽马传感器都处于运行状态下时,根据钻铤的工作状态与各个伽马传感器在所述钻铤周围各个分区的api值得到各个分区api值与自然伽马值,包括:
16.当所述钻铤处于复合钻进状态时,通过公式:
[0017][0018]
得到分区api值,其中,api1e,api2e,api3e分别为3个伽马传感器在当前分区的测量到的api值;
[0019]
通过公式:
[0020][0021]
得到自然伽马值,其中,api1n,api2n,api3n分别为3个伽马传感器测量到的自然伽马值。
[0022]
可选地,当2个伽马传感器处于运行状态下时,根据钻铤的工作状态与各个伽马传感器在所述钻铤周围各个分区的api值得到各个分区api值与自然伽马值,包括:
[0023]
当所述钻铤处于复合钻进状态时,通过公式:
[0024][0025]
得到分区api值,其中,apixe,apiye分别为2个伽马传感器在当前分区的测量到的api值;
[0026]
通过公式:
[0027][0028]
得到自然伽马值,其中,apixn,apiyn分别为2个伽马传感器测量到的自然伽马值。
[0029]
可选地,当1个伽马传感器处于运行状态下时,根据钻铤的工作状态与各个伽马传感器在所述钻铤周围各个分区的api值得到各个分区api值与自然伽马值,包括:
[0030]
当所述钻铤处于复合钻进状态时,通过公式:
[0031]
apie=apize
[0032]
得到分区api值,其中,apize分别为1个伽马传感器在当前分区的测量到的api值;
[0033]
通过公式:
[0034]
apin=apizn
[0035]
得到自然伽马值,其中,apizn分别为1个伽马传感器测量到的自然伽马值。
[0036]
可选地,根据钻铤的工作状态与各个伽马传感器在所述钻铤周围各个分区的api值得到各个分区api值与自然伽马值,包括:
[0037]
当所述钻铤处于滑动钻进状态时,通过公式:
[0038][0039]
得到每个传感器在本区域内比例pern,其中,angle_n表示伽马传感器在当前分区所占的角度;n表示第n个伽马传感器,n=1,2,3。
[0040]
通过公式:
[0041]
apie=api1
×
per1+api2
×
per2+api3
×
per3
[0042]
得到分区api值,其中,api1,api2,api3分别表示各个伽马传感器的api值;
[0043]
通过公式:
[0044][0045]
得到自然伽马值。
[0046]
可选地,所述设置所述钻铤侧壁上的伽马传感器的工作状态还包括:
[0047]
判断伽马传感器是否损坏,当伽马传感器的api值为0或者512认为此伽马传感器
已损坏。
[0048]
第二方面,提供了一种三探头方位伽马处理系统,该系统包括:
[0049]
获取模块,用于获取钻铤的工作状态,所述工作状态包括复合钻进状态和滑动钻进状态;
[0050]
设置模块,用于设置所述钻铤侧壁上的伽马传感器的工作状态以及对应分区,获取处于运行状态下的各个伽马传感器在所述钻铤周围各个分区的api值;
[0051]
处理模块,用于根据各个伽马传感器在所述钻铤周围各个分区的api值得到各个分区api值与自然伽马值。
[0052]
本技术实施例提供的技术方案中首先获取钻铤的工作状态,工作状态包括复合钻进状态和滑动钻进状态;设置钻铤侧壁上的伽马传感器的工作状态以及对应分区,获取处于运行状态下的各个伽马传感器在钻铤周围各个分区的api值;根据钻铤的工作状态与各个伽马传感器在钻铤周围各个分区的api值得到各个分区api值与自然伽马值。可以看出,本发明的有益效果在于:
[0053]
1)在滑动钻进中实现伽马分区,解决了常规方位伽马仪器在滑动钻进时无法分区的缺点。
[0054]
2)在小井眼作业中,提高储层钻遇率和开发效率。
附图说明
[0055]
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
[0056]
图1为本技术实施例提供的一种三探头方位伽马处理方法流程图;
[0057]
图2为本技术实施例提供的一种三探头伽马位置图和分区图。
具体实施方式
[0058]
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0059]
本技术三探头方位伽马由三个伽马传感器组成,各传感器圆周方向相差120
°
分布,可以在滑动钻进和复合钻进中实现伽马分区的功能,可以实现多个分区的解算;复合钻进的情况下和普通的方位伽马一样,实现各个分区伽马的api值。具体地,请参考图1,其示出了本技术实施例提供的一种三探头方位伽马处理方法的流程图,该方法可以包括以下步骤:
[0060]
步骤101,获取钻铤的工作状态。
[0061]
其中,工作状态包括复合钻进状态和滑动钻进状态;在本技术实施例中,复合钻进状态是通过大于等于3圈/分钟进行判断,滑动钻进状态是通过小于3圈/分钟进行判断。
[0062]
步骤102,设置钻铤侧壁上的伽马传感器的工作状态以及对应分区,获取处于运行
状态下的各个伽马传感器在钻铤周围各个分区的api值。
[0063]
在本技术实施例中,首先判断伽马传感器是否损坏,伽马传感器的api值为0或者512认为此伽马已损坏。
[0064]
如图2,对钻铤附近待测区域进行分区以及设置钻铤侧壁上的伽马传感器的工作状态:在复合钻进中三个伽马传感器可使用1、2、3可选(通过程序设置),方位伽马每次计算8个分区,输出可以设置成8、4、2分区;如果设置成4个分区,就将1、8区合并成上区域,4、5区合并成下区域。2、3区合并成右区域,6、7区合并成左区域。如果设置成2分区,1、2、7、8区合并成上区域,3、4、5、6区合并成下区域。
[0065]
当设置1个伽马传感器工作时的分区算法:
[0066]
伽马传感器在8个区的计数值,根据区域设置2、4、8的设置,合并各个区域计数值,计算得出各个区域的api值。自然伽马通过此伽马传感器的计数值计算api值。
[0067]
当设置2、3个伽马传感器工作时的分区算法
[0068]
每个伽马传感器在8个区的计数值,根据区域设置2、4、8的设置,每个伽马传感器合并各个区域的计数值,计算出各个区域的api值,此时每个区域有2、3个api值,每个区域的api值进行平均,就可以得到本区域的api值。自然伽马通过每个伽马传感器的计数值计算各自的api值,然后对每个api值进行平均,得到自然伽马值。
[0069]
步骤103,根据钻铤的工作状态与各个伽马传感器在钻铤周围各个分区的api值得到各个分区api值与自然伽马值。
[0070]
具体地,对于分区伽马apie(一共有8个区)的计算当设置3个伽马传感器工作时:
[0071][0072]
其中,api1e,api2e,api3e分别为3个伽马传感器在当前分区的测量到的api值;
[0073]
当设置2个伽马传感器工作时:
[0074][0075]
其中,apixe,apiye分别为2个伽马传感器在当前分区的测量到的api值。
[0076]
当设置1个伽马传感器工作时:
[0077]
apie=apize
[0078]
其中,apize分别为1个伽马传感器在当前分区的测量到的api值。
[0079]
对于自然伽马apin的计算,当设置3个伽马传感器工作时:
[0080][0081]
其中,api1n,api2n,api3n分别为3个伽马传感器测量到的自然伽马值。
[0082]
当设置2个伽马传感器工作时:
[0083][0084]
其中,apixn,apiyn分别为2个伽马传感器测量到的自然伽马值。
[0085]
当设置1个伽马传感器工作时:
[0086]
apin=apizn
[0087]
apizn分别为1个伽马传感器测量到的自然伽马值。
[0088]
当钻铤处于滑动钻进状态时,三个伽马传感器所能测量的伽马的范围是每个伽马传感器的顺时针60
°
和逆时针60
°
。也就是每个伽马传感器120
°
的范围,三个伽马传感器组成360
°
。8个区的api值计算:
[0089]
通过公式:
[0090][0091]
得到每个传感器在本区域内比例pern,其中,angle_n表示伽马传感器在当前分区所占的角度;n表示第n个伽马传感器,n=1,2,3。
[0092]
通过公式:
[0093]
apie=api1
×
per1+api2
×
per2+api3
×
per3
[0094]
得到分区api值,其中,api1,api2,api3分别表示各个伽马传感器的api值;
[0095]
通过公式:
[0096][0097]
得到自然伽马值。
[0098]
本技术实施例还提供的一种三探头方位伽马处理系统。系统包括:
[0099]
获取模块,用于获取钻铤的工作状态,工作状态包括复合钻进状态和滑动钻进状态;
[0100]
设置模块,用于设置钻铤侧壁上的伽马传感器的工作状态以及对应分区,获取处于运行状态下的各个伽马传感器在钻铤周围各个分区的api值;
[0101]
处理模块,用于根据各个伽马传感器在钻铤周围各个分区的api值得到各个分区api值与自然伽马值。
[0102]
本技术实施例提供的三探头方位伽马处理系统用于实现上述三探头方位伽马处理方法,关于三探头方位伽马处理系统的具体限定可以参见上文中对于三探头方位伽马处理方法的限定,在此不再赘述。上述三探头方位伽马处理系统中的各个部分可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于设备中的处理器中,也可以以软件形式存储于设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0103]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0104]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1