一种中深孔凿岩台车炮孔角度与推进深度控制装置及控制方法与流程
1.本发明涉及一种控制装置及控制方法,具体涉及一种中深孔凿岩台车炮孔角度与推进深度控制装置及控制方法,属于传感器检测控制技术领域。
背景技术:
2.梅山矿业分公司有7台中深孔凿岩台车,中深孔炮孔布置形式的优良与否直接影响到爆破效果的好坏,并对爆破后的生产有极大影响。现有控制炮孔角度的方法由操作工通过角度尺目测来确定,且一次只能对一个角度进行调整并需要两个操作工相互配合,既费时又容易出现误差,而且存在一定的安全风险。推进深度靠计算推进的钎杆的数量乘以钎杆米数进行估算,往往偏差很大,严重影响炮孔使用效率,所以急需一种准确控制角度与推进深度的方法。
技术实现要素:
3.本发明正是针对现有技术中存在的问题,提供一种中深孔凿岩台车炮孔角度与推进深度控制装置及控制方法,该技术方案消除中深孔凿岩台车炮孔角度及推进深度的误差。
4.为了实现上述目的,本发明的技术方案如下,一种中深孔凿岩台车炮孔角度与推进深度控制装置及控制方法,其特征在于,所述控制装置包括滑动支架、推进梁、旋转机构、角度模块组件、plc组件、显示器组件、传感器组件以及电源控制箱,所述滑动支架安装在凿岩台车的前机架处,旋转机构固定在滑动支架上,推进梁通过推进梁固定架固定在旋转机构上,电源控制箱连接角度模块组件,显示器组件与操作台相连接,plc组控制角度模块组件并在显示器组件上进行显示。
5.作为本发明的一种改进,所述传感器组件包括大摆角度传感器、俯仰角度传感器、小摆角度传感器以及推进深度传感器,其中大摆角度传感器安装在旋转机构内圈中,俯仰角度传感器安装在旋转机构外侧下端,小摆角度传感器安装在推进梁的左侧,推进深度传感器安装在推进梁右侧。所述装置还包括凿岩机、推进梁跑道、滑块一、滑块二、金属线、空转轮以及支架固定附件,推进梁跑道固定在推进梁上,凿岩机与推进梁跑道相固定,滑块一、与滑块二为凿岩机运动时起滑动作用,支架固定附件与空转轮相连,并固定在滑块一与滑块二中间,金属线通过空转轮与推进深度传感器连接。
6.作为本发明的一种改进,所述角度模块组件包括电源控制箱与角度模块x1连接的电源线、角度模块终端电阻x3、角度模块x4与plc的x4连接的can总线26、角度模块地址x527以及角度模块29,其中角度模块29上有11个接口,x1由电源控制箱28与角度模块29的x1连接的电源线24相连;x3接角度模块29的终端电阻25;x4由角度模块29的x4与plc21的x4连接的can总线26相连;x5是角度模块29的地址27;x6为小摆角度传感器7;x7为俯仰角度传感器6;x8为大摆角度传感器4。电源控制箱28安装在前机架,通过4芯电缆为角度模块29提供24v
直流电源。
7.作为本发明的一种改进,所述显示器组件包括显示器x3与操作台x3连接的can总线16、显示器x1与操作台x1连接的电源线17、显示器终端电阻x4 18、显示器地址x5 19以及显示器22、其中显示器22上有四个接口,其中x1由显示器22的x1与操作台23的x1连接的电源线17与操作台23相连;x3是显示器22的x3与操作台23的x3连接的can总线16;x4是显示器22的终端电阻18;x5是显示器22的地址19。
8.作为本发明的一种改进,plc组件包括plc与操作台连接电缆20以及plc 21,其中plc21与操作台23之间由plc与操作台连接电缆20相连。plc21的两个接口分别为x4及x12。x4由角度模块29的x4与plc21的的x4连接的can总线26相连;x12由深度测量信号电缆30与角度模块29的x12相连。
9.作为本发明的一种改进,控制方法是在作业前对推进梁和摆臂进行调节,使其钻头指向上并完全垂直,操作人员用水平尺复查确保为90
°
。打开显示器22上校准面板,按下归零按钮。为了使角度倾斜(以及其它功能)正确工作,必须相应地标定角度传感器的正负方向。在需要控制某个角度时通过操作台23上手柄来分别控制大摆、小摆、俯仰电磁阀,plc21可以通过大摆角度传感器4、俯仰角度传感器6、小摆角度传感器7通过角度模块29计算出相应的角度并在显示器22窗口显示。推进深度的计算由凿岩机9作业时向上推进带动支架固定附件15及金属线13通过空转轮14与推进深度传感器8工作,并经过角度模块29上的x12由深度测量信号电缆30与plc21的x12计算出深度并在显示器22窗口显示。
10.相对于现有技术,本发明具有如下优点,通过该技术方案运用,可准确地控制中深孔凿岩台车炮孔角度及推进深度,提供炮孔利用率。该控制方法属于智能控制,调整角度、深度既省时又准确,使用效率和稳定性好,具体如下:1)不需操作工到炮孔下方测量,消除安全风险;2)作业前调节推进梁和摆臂,使其钻头指向上并完全垂直。用水平尺检查。对相关传感器进行校准清零。通过操作台上手柄来分别调整大摆、小摆、俯仰电磁阀,plc可以通过各个传感器经过角度模块计算出相应的角度并在显示器窗口显示;3)推进深度的计算凿岩机作业时向上推进带动支架固定附件及金属线通过空转轮与推进深度传感器工作,并经过角度模块与plc计算出深度并在显示器窗口显示。
附图说明
11.图1、角度传感器安装示意图;
12.图2、推进深度传感器安装示意图;
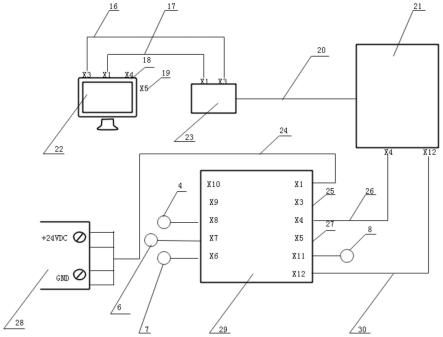
13.图3、电气控制线路安装示意图。
14.图中:1、滑动支架;2、推进梁;3、旋转机构;4、大摆角度传感器;5、推进梁固定架;6、俯仰角度传感器;7、小摆角度传感器;8、推进深度传感器;9、凿岩机;10、推进梁跑道;11、滑块一;12、滑块二;13、金属线;14、空转轮;15、支架固定附件;16、显示器x3与操作台x3连接的can总线;17、显示器x1与操作台x1连接的电源线;18、显示器终端电阻x4;19、显示器地址x5;20、plc与操作台连接电缆;21、plc;22、显示器;23、操作台;24、电源控制箱与角度模块x1连接的电源线;25、角度模块终端电阻x3;26、角度模块x4与plc的x4连接的can总线;27、角度模块地址x5;28、电源控制箱;29、角度模块;30、深度测量信号电缆。
具体实施方式
15.为了加深对本发明的理解,下面结合附图对本实施例做详细的说明。
16.实施例1:参见图1-图3,一种中深孔凿岩台车炮孔角度与推进深度控制装置,所述控制装置包括滑动支架1、推进梁2、旋转机构3、角度模块组件、plc组件、显示器组件、传感器组件以及电源控制箱,所述滑动支架1安装在凿岩台车的前机架处,旋转机构3固定在滑动支架1上,推进梁2通过推进梁固定架5固定在旋转机构3上,电源控制箱连接角度模块组件,显示器组件与操作台23相连接,plc组控制角度模块组件并在显示器组件上进行显示,所述传感器组件包括大摆角度传感器4、俯仰角度传感器6、小摆角度传感器7以及推进深度传感器8,其中大摆角度传感器4安装在旋转机构3内圈中,俯仰角度传感器6安装在旋转机构3外侧下端,小摆角度传感器7安装在推进梁2的左侧,推进深度传感器8安装在推进梁2右侧。所述装置还包括凿岩机9、推进梁跑道10、滑块一11、滑块二12、金属线13、空转轮14以及支架固定附件15,推进梁跑道10固定在推进梁2上,凿岩机9与推进梁跑道10相固定,滑块一11、与滑块二12、为凿岩机9运动时起滑动作用,支架固定附件15与空转轮14相连,并固定在滑块一11与滑块二12中间,金属线13通过空转轮14与推进深度传感器8连接,所述角度模块组件包括电源控制箱与角度模块x1连接的电源线24、角度模块终端电阻x3 25、角度模块x4与plc的x4连接的can总线26、角度模块地址x5 27以及角度模块29,其中角度模块29上有11个接口,x1由电源控制箱28与角度模块29的x1连接的电源线24相连;x3接角度模块29的终端电阻25;x4由角度模块29的x4与plc21的x4连接的can总线26相连;x5是角度模块29的地址27;x6为小摆角度传感器7;x7为俯仰角度传感器6;x8为大摆角度传感器4。电源控制箱28安装在前机架,通过4芯电缆为角度模块29提供24v直流电源,所述显示器组件包括显示器x3与操作台x3连接的can总线16、显示器x1与操作台x1连接的电源线17、显示器终端电阻x4 18、显示器地址x5 19以及显示器22、其中显示器22上有四个接口,其中x1由显示器22的x1与操作台23的x1连接的电源线17与操作台23相连;x3是显示器22的x3与操作台23的x3连接的can总线16;x4是显示器22的终端电阻18;x5是显示器22的地址19,plc组件包括plc与操作台连接电缆20以及plc 21,其中plc21与操作台23之间由plc与操作台连接电缆20相连。plc21的两个接口分别为x4及x12。x4由角度模块29的x4与plc21的的x4连接的can总线26相连;x12由深度测量信号电缆30与角度模块29的x12相连。
17.实施例2:参见图1-图3,一种中深孔凿岩台车炮孔角度与推进深度控制方法,控制方法是在作业前对推进梁和摆臂进行调节,使其钻头指向上并完全垂直,操作人员用水平尺复查确保为90
°
。打开显示器22上校准面板,按下归零按钮。为了使角度倾斜(以及其它功能)正确工作,必须相应地标定角度传感器的正负方向。在需要控制某个角度时通过操作台23上手柄来分别控制大摆、小摆、俯仰电磁阀,plc21可以通过大摆角度传感器4、俯仰角度传感器6、小摆角度传感器7通过角度模块29计算出相应的角度并在显示器22窗口显示。推进深度的计算由凿岩机9作业时向上推进带动支架固定附件15及金属线13通过空转轮14与推进深度传感器8工作,并经过角度模块29上的x12由深度测量信号电缆30与plc21的x12计算出深度并在显示器22窗口显示
18.具体工作原理:
19.电气控制线路如图3所示:
20.图中,电气控制线路由plc 21、显示器22、操作台23、电源控制箱28、角度模块29等
组成。显示器22上有四个接口,其中x1由17、显示器x1与操作台x1连接的电源线与操作台23相连;x3由显示器16、x3与操作台x3连接的can总线;显示器终端电阻x4 18、显示器地址x5 19,plc21与操作台23之间由plc与操作台连接电缆相连,plc的两个接口分别为x4由角度模块x4与plc的x4连接的can总线,以及x12由深度测量信号电缆与角度模块的x12相连。角度模块上由11个接口,x1由电源控制箱与角度模块x1连接的电源线相连;角度模块终端电阻x3;角度模块地址x5;x6为小摆角度传感器;x7为俯仰角度传感器;x8为大摆角度传感器。电源控制箱安装在前机架,通过4芯电缆为角度模块提供24v直流电源。
21.作业前调节推进梁和摆臂,使其钻头指向上并完全垂直。用水平尺检查。打开22、显示器上校准面板,按下归零按钮。为了使角度倾斜(以及其它功能)正确工作,必须相应地标定角度传感器的正负方向。
22.在需要控制某个角度时通过23、操作台上手柄来分别调整大摆、小摆、俯仰电磁阀,plc可以通过大摆角度传感器,俯仰角度传感器,小摆角度传感器经过角度模块计算出相应的角度并在显示器窗口显示。推进深度的计算由9、凿岩机作业时向上推进带动支架固定附件及金属线通过空转轮与推进深度传感器工作,并经过角度模块上的x12由深度测量信号电缆与plc的x12计算出深度并在显示器窗口显示。
23.需要说明的是上述实施例,并非用来限定本发明的保护范围,在上述技术方案的基础上所作出的等同变换或替代均落入本发明权利要求所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1