隧道内拱形钢结构转运拼装设备及方法与流程
1.本发明涉及隧道内装配式钢结构工程施工技术领域,具体涉及隧道内拱形钢结构转运拼装设备及转运拼装方法。
背景技术:
2.在隧道开挖过程中,需要沿隧道方向在隧道内架设“拱形钢结构”支护隧道,以防止隧道塌方。在隧道内拱形钢结构施工过程中,需要将拱形钢结构输送到待安装地点,然后进行拼装。现有的机械化拼装设备可见于申请公布号为cn114135325a的专利文献公开的“一种隧道内拱形钢结构拼装设备及方法”,以及申请公布号为cn114046164a的专利文献公开的“一种隧道内装配式钢结构多功能拼装设备”。此类拼装设备,包括行走机构和安装在行走机构上的拼装机构,拼装机构的机械臂及机械臂末端的执行器能够抓取和放下钢结构,不同类型的执行器则可以抓取不同的钢结构,例如cn114135325a专利文献中的执行器可以抓取整体拱形钢结构,而cn114046164a专利文献中的执行器可以更换,两种执行器可以分别抓取相互独立的顶拱钢构、侧墙钢构。
3.上述现有的拼装设备,通过行走机构所搭载的机械臂抓取钢结构,并一起在隧道中行走,从而实现钢结构在隧道中的转运,而通过机械臂的运动可以调整钢结构的姿态并移动至待安装位置,在现场人员配合下将转运来的钢结构与既有的钢结构进行拼装。但现有技术中的拼装设备,在一次转运时都只有一种执行器与钢结构固定配合,若转运整体拱形钢结构,则因执行器与钢结构固定配合限于局部(例如cn114135325a专利文献中为拱顶底部),而不够牢靠,存在倾覆、脱落等施工风险,而若一次仅转运某个刚结构部件(顶拱钢构、侧墙钢构),则效率不高。
技术实现要素:
4.本发明的目的是提供一种隧道内拱形钢结构转运拼装设备,在保证施工安全的同时提高施工效率。本发明的目的还在于提供一种隧道内拱形钢结构转运拼装方法,以降低安全隐患、提高工作效率。
5.本发明提供的一种隧道内拱形钢结构转运拼装设备,包括行走机构,行走机构上安装有拼装机构,拼装机构包括机械臂,机械臂末端具有执行器,执行器具有配合结构,用于在钢结构转运、拼装时与钢结构上的相应结构固定配合;机械臂包括顶机械臂、侧机械臂;顶机械臂包括用于与顶拱钢构配合的第一执行器、升降单元,升降单元用于驱动第一执行器升降,而使第一执行器接近或脱离顶拱钢构的底部以与顶拱钢构固定配合或分离,或者带动与第一执行器固定配合的顶拱钢构升降;侧机械臂包括用于与侧墙钢构配合的第二执行器、侧移单元,侧移单元用于驱动第二执行器左右运动,而使第二执行器接近或脱离侧墙钢构的侧面以与侧墙钢构固定配合或分离,或者带动与第二执行器固定配合的侧墙钢构移动至预定位置,所述预定位置包括:安装位、运送位,安装位靠近隧道壁以对应侧墙钢构的待安装位置,运送位靠近行走机构、远离隧道壁以避让隧道壁;拼装机构还包括升降装
置,顶机械臂和/或侧机械臂安装在升降装置上,升降装置用于带动顶机械臂及顶机械臂固定配合的顶拱钢构升降和/或用于带动侧机械臂及侧机械臂固定配合的侧墙钢构升降。
6.本发明的隧道内拱形钢结构转运拼装设备,具备两种机械臂,顶机械臂和侧机械臂既能够相互协同配合,而对整体拱形钢结构从不同位置进行牢固支撑,所以能够安全高效的转运拼装整体拱形钢结构;而且两种机械臂还能够单独转运拼装顶拱钢构、侧墙钢构,并通过机械臂升降、侧移的便捷操作,可以使钢结构随同机械臂远离隧道壁,从而能够在转运时避让隧道壁面,使得本发明所适用的隧道断面范围更广。
7.进一步的,所述第二执行器的配合结构为卡爪,卡爪具有向上翻折的翻边,侧墙钢构上固定有与所述卡爪对应的连接板,所述连接板具有向下翻折的翻边,卡爪的向上翻折的翻边用于与连接板的向下翻折的翻边互扣固定配合。
8.进一步的,所述升降装置包括升降平台、升降机构,所述机械臂安装在升降平台上,升降机构用于驱动升降平台升降。
9.进一步的,所述顶机械臂包括回转单元,回转单元用于驱动第一执行器绕竖直轴线旋转设定角度,而具有两个状态:横状态、纵状态,以调整与第一执行器固定配合的顶拱钢构的姿态,横状态的第一执行器使顶拱钢构的左右拱腿处于行走机构的左右两侧,纵状态的第一执行器使顶拱钢构的左右拱腿处于行走机构的前后两侧。回转单元使得原来竖直方向上伸缩升降的顶机械臂,同时具有绕竖直方向轴线回转的自由度,从而既能够改变弧顶位置的顶拱钢构的高度,还能改变其横纵位姿,纵状态的第一执行器使顶拱钢构的左右拱腿处于行走机构的前后两侧,即减少了顶拱钢构在左右方向上所占用的空间,从而最大限度的远离隧道壁,使本发明能够适应于左右方向宽度较小的小尺寸隧道。
10.进一步的,所述侧机械臂的侧移单元包括左右移动单元和/或左右摆动单元,所述左右运动包括后述至少一个:平移、摆动。左右移动单元、左右摆动单元使侧机械臂能够同时具有左右移动的自由度和左右摆动的自由度,使第二执行器拥有了更大的活动范围。
11.进一步的,所述第二执行器的转运位处于行走机构的前方或后方,所述第二执行器的安装位处于行走机构的左右两侧。当侧机械臂的侧移单元驱动第二执行器处于转运位时,第二执行器所固定配合的侧墙钢构处于行走机构的前侧,而处于隧道的中央,从而最大限度的远离隧道壁,从而使本发明能够适应于左右方向宽度较小的小尺寸隧道。
12.本发明提供的一种隧道内拱形钢结构转运拼装方法,利用上述的隧道内拱形钢结构拼装设备,用于一次转运拼装整体拱形钢结构,包括:
13.(1)在吊装位置,侧机械臂的侧移单元驱动第二执行器接近侧墙钢构的侧面,侧移机械臂在升降装置带动下上升而使第二执行器与侧墙钢构固定配合;顶机械臂的升降单元驱动第一执行器上升,直至第一执行器与顶拱钢构底部固定配合;
14.(2)在侧机械臂与侧墙钢构固定配合、顶机械臂与顶拱钢构固定配合均完成后,升降装置带动侧机械臂、顶机械臂及整体拱形钢结构整体上升,使整体拱形钢结构离开地面,然后行走机构移动至待安装位置;
15.(3)在待安装位置,升降装置带动侧机械臂、顶机械臂及整体拱形钢结构整体下降,使整体拱形钢结构落回地面,然后将待安装的拱形钢结构与既有的拱形钢结构固定连接,最后使顶机械臂的升降单元驱动第一执行器下降脱离顶拱钢构、侧机械臂的侧移单元驱动第二执行器脱离侧墙钢构的侧面,行走机构移动返回至吊装位置,进行下一个钢结构
的吊装。
16.本发明提供的另一种隧道内拱形钢结构转运拼装方法,利用上述的隧道内拱形钢结构拼装设备,用于先后转运拼装侧墙钢构、顶拱钢构,包括:
17.(1)侧墙钢构的转运拼装:在吊装位置,侧机械臂的侧移单元驱动第二执行器处于运送位,行走机构携带侧墙钢构运动至待安装位置,侧机械臂的侧移单元驱动第二执行器处于安装位,升降装置下降将侧墙钢构放置在待安装位置地面并进行拼装;
18.(2)顶拱钢构的转运拼装:待左右两个侧墙钢构安装后,在吊装位置,第一执行器被顶机械臂的升降单元驱动下降至有利于转运的设定高度,将顶拱钢构放置在第一执行器上并固定,使用行走机构带动顶机械臂转运顶拱钢构到待安装位置;在待安装位置,第一执行器被顶机械臂的升降单元驱动上升至设定高度,使顶拱钢构处于两个侧墙钢构上方,然后第一执行器被顶机械臂的升降单元驱动下降,使顶拱钢构放置在两个侧墙钢构之上并进行拼装。
19.进一步的,所述顶机械臂包括回转单元,回转单元用于驱动第一执行器绕竖直轴线旋转设定角度,而具有两个状态:横状态、纵状态,以调整与第一执行器固定配合的顶拱钢构的姿态,横状态的第一执行器使顶拱钢构的左右拱腿处于行走机构的左右两侧,纵状态的第一执行器使顶拱钢构的左右拱腿处于行走机构的前后两侧;在转运顶拱钢构时,第一执行器被回转单元驱动旋转至纵状态,而使顶拱钢构的左右拱腿处于行走机构的前后两侧,以避让左右两侧的隧道壁。
20.进一步的,所述侧机械臂的侧移单元包括左右移动单元和左右摆动单元,所述第二执行器的转运位处于行走机构的前方或后方,所述第二执行器的安装位处于行走机构的左右两侧;在转运侧墙钢构时,第二执行器及侧墙钢构被侧移单元驱动至行走机构的前方或后方,以避让左右两侧的隧道壁。
附图说明
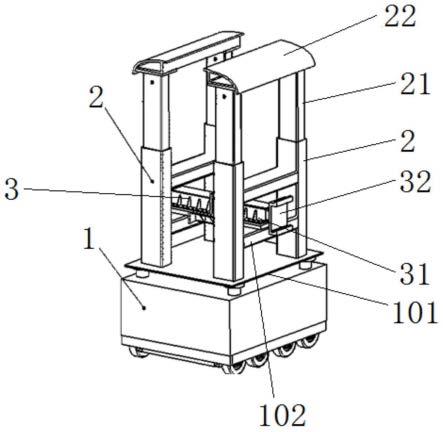
21.图1是本发明的隧道内拱形钢结构转运拼装设备的实施例1的结构示意图;
22.图2是拱形钢结构的立体示意图;
23.图3是侧墙钢构的示意图;
24.图4是实施例1的施工状态图之一;
25.图5是实施例1的施工状态图之二;
26.图6是实施例1的施工状态图之三;
27.图7是实施例1的施工状态图之四;
28.图8是实施例1的施工状态图之五;
29.图9是实施例1的施工状态图之六;
30.图10是实施例1的施工状态图之七;
31.图11是本发明的隧道内拱形钢结构转运拼装设备的实施例2的结构示意图;
32.图12是图11中的顶机械臂的结构示意图;
33.图13是图11中的侧机械臂的结构示意图;
34.图14是实施例2的施工状态图之一;
35.图15是实施例2的施工状态图之二;
36.图16是实施例2的施工状态图之三;
37.图17是实施例2的施工状态图之四;
38.图18是实施例2的施工状态图之五;
39.图19是实施例2的施工状态图之六;
40.图中:
41.1、行走机构;101、升降平台;102、安装架;2、顶机械臂;21、伸缩单元;22、第一执行器;3、侧机械臂;31、侧移单元;32、第二执行器;4、顶拱钢构;5、侧墙钢构;51、连接板;6、大尺寸隧道;7、小尺寸隧道;8、地面;9、待拼装位置;201、外臂;202、内臂;203、回转单元;204、上爪;3011、滑轨;3012、滑块;3013、驱动电机;302、平移臂;303、摆动装置;304、摆臂。
具体实施方式
42.本发明的隧道内拱形钢结构转运拼装设备的实施例1,如图1所示,包括行走机构1,行走机构1上安装有拼装机构,拼装机构包括升降平台101、升降机构、安装在升降平台101上的机械臂,升降机构用于驱动升降平台101升降。机械臂有两种:顶机械臂2、侧机械臂3,分别对应如图2、图3所示的拱形钢结构的两部分:顶拱钢构4、侧墙钢构5。各机械臂末端具有执行器,执行器具有配合结构,用于在钢结构转运、拼装时与钢结构上的相应结构固定配合,顶机械臂2的第一执行器22用于与顶拱钢构4固定配合,侧机械臂3的第二执行器32用于与侧墙钢构5固定配合。
43.在本实施例中,顶机械臂2有两个,沿竖直方向延伸,左右并列设置在升降平台101上,顶机械臂2包括用于与顶拱钢构4固定配合的第一执行器22、升降单元,升降单元具体为伸缩油缸,升降单元用于驱动第一执行器22升降,而使第一执行器22接近或脱离顶拱钢构4的底部以与顶拱钢构4固定配合或分离,而且升降单元还能够用于带动与第一执行器22固定配合的顶拱钢构4升降。本实施例中的第一执行器22的配合结构是设置在第一执行器22的顶端的支撑弧面,支撑弧面用于与顶拱钢构4的底面吻合配合而能够形成支撑固定配合。
44.侧机械臂3有两个,沿水平方向延伸,左右相背设置在升降平台101上,侧机械臂3包括用于与侧墙钢构5配合的第二执行器32、侧移单元31,侧移单元31具体为伸缩油缸,侧移单元31用于驱动第二执行器32左右运动,而使第二执行器32接近或脱离侧墙钢构5的内侧面以与侧墙钢构5固定配合或分离。在本实施例中的左右运动具体为左右平移运动,即沿直线的运动,而在其它实施例中,左右运动还可以左右摆动移动或者左右平移和左右摆动的结合,与之相应的侧移单元31可以是旋转驱动机构,例如输出扭矩的电机带动的或液压马达。而且侧移单元31还用于带动与第二执行器32固定配合的侧墙钢构5左右移动至预定位置:安装位、运送位,安装位靠近隧道壁以对应侧墙钢构5的待安装位置,运送位靠近行走机构1、远离隧道壁以避让隧道壁。本实施例中的第二执行器32的配合结构为卡爪,卡爪具有向上翻折的翻边。与之相应的,如图3所示,在侧墙钢构5的内侧面的合适位置打孔、然后通过螺栓固定连接板51,连接板51具有向下翻折的翻边,卡爪的向上翻折的翻边与侧墙钢构5的连接板51的向下翻折的翻边形成互扣固定配合,以将侧墙钢构5抓起。
45.本发明的上述实施例1在使用时,有后述的两种拼装方式:拼装方式一是运输拼装整体拱形钢结构,拼装方式二是先后运输拼装侧墙钢构5、顶拱钢构4。
46.如图4-图6所示,拼装方式一的步骤如下,它同时是本发明的隧道内拱形钢结构转
运拼装方法的实施例a:
47.(1)如图4所示,在吊装位置,通过吊机将整体拱形钢结构吊起,在侧墙钢构5的侧面用螺栓固定连接板51,行走机构1运动至拱形钢结构正下方。
48.(2)如图5所示,侧机械臂3的侧移单元31伸长,两个第二执行器32运动接近侧墙钢构5侧面,第二执行器32的卡爪进入连接板51的凹槽中,即运动至能够与连接板51固定配合的位置,后续升降平台101上升则能够使第二执行器32的卡爪与侧墙钢构5上的连接板51配合,从而保证上升过程中,整块箱体处于稳定状态。
49.(3)如图6所示,顶机械臂2的升降单元向上伸长,直至两个第一执行器22与顶拱钢构4底部的弧形面接触,保持整体钢箱结构稳定,防止在运输过程中发生侧翻;在侧机械臂3与侧墙钢构5固定配合、顶机械臂2与顶拱钢构4固定配合完成后,升降平台101上升,通过整体举升而使顶机械臂2、侧机械臂3及整体拱形钢结构离开地面8,然后行走机构1带动整体拱形钢结构移动至待安装位置。
50.(4)在移动至待安装位置后,升降平台101下降而使整体拱形钢结构落回地面8(可参考图5),保持侧机械臂3与侧墙钢构5固定配合、顶机械臂2与顶拱钢构4固定配合而提供支撑保障,然后将待安装的拱形钢结构与既有的拱形钢结构固定连接好,再将侧机械臂3、顶机械臂2收回而脱离拱形钢结构(可参考图4),行走机构1移动返回至吊装位置,进行下一个钢结构的吊装。
51.如图7-图10所示,拼装方式二的步骤如下,它同时是本发明的隧道内拱形钢结构转运拼装方法的实施例b:
52.(1)如图7所示,在吊装位置,行走机构1上装有防止运输时发生侧翻的配重块,通过吊机将侧墙钢构5吊装在侧机械臂3上,并使侧墙钢构5的连接板51与侧机械臂3的卡爪配合;此时侧移单元31缩回,第二执行器32处于运送位,这样侧墙钢构5靠近行走机构1而远离隧道壁,既减少了可能造成侧翻的扭矩,又避免碰到隧道壁,利于运输。
53.(2)如图8所示,行走机构1携带侧墙钢构5运动至待安装位置,侧移单元31伸出使第二执行器32处于安装位,升降平台101下降将侧墙钢构5放置在待安装位置地面8,将待安装的钢结构与既有的钢结构固定连接好,侧移单元31缩回而使第二执行器32脱离侧墙钢构5,行走机构1移动返回至吊装位置,进行下一个钢结构的吊装。
54.(3)如图9、图10所示,待两个侧墙钢构5安装后,使用顶机械臂2可以转运一个顶拱钢构4到待安装位置。在吊装位置及转运过程中,顶机械臂2的升降单元降下,以利于放置顶拱钢构4及运输顶拱钢构4,在待安装位置,顶机械臂2的升降单元升起,使顶拱钢构4处于两个侧墙钢构5上方,然后顶机械臂2的升降单元降下,使顶拱钢构4放置在两个侧墙钢构5之上并进行固定,顶机械臂2的升降单元降下而使第一执行器22脱离顶拱钢构4,行走机构1移动返回至吊装位置,进行下一个钢结构的吊装。
55.本发明的隧道内拱形钢结构转运拼装设备的实施例2,如图11-图19所示,与实施例1的不同之处在于顶机械臂2、侧机械臂3的数量和结构,以及与之相应的,它们在单独转运顶拱钢构4、侧墙钢构5时,对顶拱钢构4、侧墙钢构5的位姿调整也所有区别,具体如下:
56.顶机械臂2为一个,顶机械臂2的第一执行器的配合结构为上爪204,上爪204具有能够卡住顶拱钢构4前后端面的卡槽。如图12所示,顶机械臂2除了升降单元(升降单元包括嵌套的外臂201、内臂202,由内部的液压油缸驱动)以外,还包括回转单元203,回转单元203
使得原来竖直方向上伸缩升降的顶机械臂2,同时具有绕竖直方向轴线回转的自由度,从而既能够改变弧顶位置的顶拱钢构4的高度,还能改变其横纵位姿,具体的,回转单元203用于驱动第一执行器的上爪204绕竖直轴线旋转设定角度,而具有两个状态:横状态、纵状态,以调整与第一执行器固定配合的顶拱钢构4的姿态,横状态的第一执行器使顶拱钢构4的左右拱腿处于行走机构1的左右两侧,纵状态的第一执行器使顶拱钢构4的左右拱腿处于行走机构1的前后两侧。
57.如图17所示,横状态的第一执行器使顶拱钢构4的左右拱腿处于行走机构1的左右两侧,不能通过左右方向宽度较小的小尺寸隧道7。如图18所示,旋转变换成纵状态的第一执行器使顶拱钢构4的左右拱腿处于行走机构1的前后两侧,而能够通过左右方向宽度较小的小尺寸隧道7,以到达大尺寸隧道6中的安装位置。如图19所示,在大尺寸隧道6中的安装位置,旋转变换成横状态的第一执行器使顶拱钢构4的左右拱腿处于行走机构1的左右两侧,使顶拱钢构4处于两个侧墙钢构5上方,以进行组装固定。
58.同时,侧机械臂3为一个,侧机械臂3安装在行走机构1的正前侧,侧机械臂3的侧移单元包括左右平移单元和左右摆动单元,如图13所示,左右平移单元包括滑轨3011、滑块3012、驱动电机3013、平移臂302,驱动电机3013用于驱动滑块3012上的行走轮转动以沿导轨左右移动,左右摆动单元包括摆动装置303和摆臂304,摆动装置303具体为电机或液压马达,输出扭矩以驱动摆臂304左右摆动,能够实现左右方向各90
°
的摆动,第二执行器固定在摆臂304末端。
59.如前所述,在本发明的隧道内拱形钢结构转运拼装设备的实施例2中,由于侧移单元包括左右移动单元和左右摆动单元,侧机械臂3同时具有左右移动的自由度和左右摆动的自由度。使第二执行器拥有了更大的活动范围,侧机械臂3的侧移单元能够驱动第二执行器带着侧墙钢构5移动到转运位、安装位,转运位处于行走机构1的前方,安装位处于行走机构1的左右两侧。
60.如图14、图15所示,当侧机械臂3的侧移单元驱动第二执行器处于转运位时,侧墙钢构5远离隧道壁,而能够适应于左右方向宽度较小的小尺寸隧道7(如图15所示)。
61.而如图16所示,当行走机构1到达了宽度较大的大尺寸隧道6的待安装位置时,则侧机械臂的侧移单元驱动第二执行器处于安装位,侧墙钢构5靠近隧道壁,待升降平台101降下,即可与既有钢结构进行拼装固定。
62.另外,本发明的其它实施例中,机械臂末端的执行器所具有的配合结构,并不局限于上述实施例中的卡爪形式,也可以是如背景技术中现有技术提供的能够开合(气缸驱动)的夹爪、卡勾等能够与钢结构固定配合的配合结构。
63.另外,上述实施例中的升降装置是在一个整体的升降平台上同时安装两种机械臂,在其它实施例中,升降装置也可以是分开的,分别驱动两种机械臂,既可以同步驱动也可以先后驱动。
64.另外,本发明的其它实施例中,同种机械臂的数量可以根据实际需要变换,例如实施例2中的侧机械臂也可以是两个,前后各装一个,这样可以一次转运两个侧墙钢构,也可以在转运整体拱形钢结构时进行两侧支撑;当然实施例1中的侧机械臂也可以是一个,在转运整体拱形钢结构时仅进行一侧支撑;当然实施例1中的顶机械臂也可以是一个,并适应性的将第一执行器顶端设计为半圆圆弧。
65.另外,本发明的其它实施例中,侧机械臂的侧移单元是指能够对第二执行器提供侧向位置变化的驱动机构,而侧移包括平移和旋转,所以侧机械臂的侧移单元也可以仅包括左右摆动单元。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1