一种盾构沉降智能控制及分布式控制网络的制作方法
1.本发明涉及盾构沉降智能控制技术领域。
背景技术:
2.传统盾构沉降控制理论及其局限
3.盾构施工对地层沉降影响的机理非常复杂,一般认为盾构施工引起的地层损失及盾构扰动引起的周围土体地层再固结,是地面沉降的根本原因;对于埋深较深的软土地层,由盾构施工引起地层损失是导致地面沉降的主要因素。地层损失是盾构开挖土体体积和建成隧道体积之差,建成隧道体积包括隧道外围包裹的同步注浆等填充物料的体积,地层损失率为地层损失与盾构理论排土体积的百分比。
4.当前行业内主流盾构沉降控制理论,peck理论认为在假定理想情况下盾构施工引起的地表沉降体积应该等于地层损失的体积,并假定地层损失在隧道长度上均匀分布,地面沉降槽的横向分布呈现正态分布曲线形式,那么地层损失率为:
[0005][0006]
该经验公式中,r为地层损失率,i为地表沉降槽宽度,s
max
为地表沉降最大值,v为盾构截面面积。
[0007]
基于该地层损失率概念的peck理论在实际应用过程中具有三大局限:
[0008]
1)其无法直接测量,其只能采用人工去测量i和s
max
来反算,而无法通过传感器等技术手段实现自动化测量。
[0009]
2)其计算无法准确,实际工程中盾构穿越区域地表往往为公路、水草、河道、泥泞、建筑物等,导致地表沉降槽无法准确识别,甚至根本无法测量。
[0010]
3)其计算严重滞后,盾构地表沉降有滞后性,一般盾构穿越1周至1个月之后地层损失影响才逐步完整的传导到地表,通过此时的地表沉降槽来反算盾构地层损失率没有超前性,对盾构施工及穿越没有实际风险管控意义。
[0011]
行业发展及其安全需求
[0012]
上海市域铁路以地下盾构隧道工程为主,工况复杂安全要求高,如机场联络线隧桥比为96.6%,嘉闵线全部为地下盾构隧道工程,机场线盾构穿越城市中心区域敏感构建筑物多达137处,嘉闵线盾构穿越多达186处,其中机场线盾构沿沪杭高铁平行段长达5.8km,控制精度高达2mm,风险高、难度大,工可、初步设计和施工方案等文件中均明确提出盾构施工时应严控地层损失率,如部分盾构穿越的地层损失率为小于3
‰
。当前,地层损失率是衡量盾构施工水平及其能否安全穿越敏感构建筑物的一个核心理论指标,也是设计文件对盾构施工提出的明确的管控指标。
技术实现要素:
[0013]
针对当前主流盾构沉降控制理论的以上不足,本技术公开一种全新的盾构沉降控
制理论及方法,其特征在于,本发明突破了传统盾构沉降控制理论,采用了【出渣平衡比+盾体填充率+盾尾填充率+地层损失控制系数】的“3+1”模型表征地层损失,从而实现有效控制盾构施工沉降的方法。进一步的开发应用,可以与盾构施工信息化平台融合,开发出盾构沉降控制自动预警系统,同时与盾构机控制系统、地理信息系统等融合,开发出分布于各地的盾构施工智能体(自动沉降控制系统),构建盾构沉降智能控制及分布式控制网络。本发明在业内实现盾构自动沉降控制技术的革命性突破。
[0014]
技术方案一
[0015]
一种盾构沉降控制模型,其特征在于:
[0016]
第一部分,盾构机若为泥水平衡盾构机,则模型包括
[0017]
其中,i0为地层损失控制系数,ρ1为进泥密度,ρ2为排泥密度,ρ为地层密度,q1为进泥流量,q2为排泥流量,s0为超挖面积,s1为开挖面积,s2为盾体空隙轴向投影面积,s3盾尾空隙轴向投影面积,v为盾构推进速度;
[0018]
i1为出渣平衡比,其中,ρ1为进泥密度,ρ2为排泥密度,q1为进泥流量,q2为排泥流量,s0为超挖面积,s1为开挖面积,v为盾构推进速度,ρ为地层密度;
[0019]
i2为盾体填充率,其中,为盾体注入单孔(第i个孔)注入流量,s2为盾体空隙轴向投影面积,v为盾构推进速度;
[0020]
i3为盾尾填充率,其中,为同步注浆单孔注入流量(第i个同步注浆孔);s3盾尾空隙轴向投影面积;v为盾构推进速度;
[0021]
第二部分,盾构机若为土压平衡盾构机,则模型包括
[0022]
其中,i0为地层损失控制系数,ω为螺旋机转速,m为螺旋机单转排出质量,ρ为地层密度,s0为超挖面积,s1为开挖面积,v为盾构推进速度,s0为超挖面积,s1为开挖面积,s2为盾体空隙轴向投影面积,s3盾尾空隙轴向投影面积;
[0023]
i1为出渣平衡比,其中,ω为螺旋机转速,m为螺旋机单转排出质量,s0为超挖面积,s1为开挖面积,v为盾构推进速度,ρ为地层密度;
[0024]
i2,i3相同于泥水平衡盾构;
[0025]
以上i0/i1/i2/i3算法公式组成了本发明【出渣平衡比+盾体填充率+盾尾填充率+地层损失控制系数】的“3+1”算法模型,用来表征盾构(泥水平衡盾构和土压平衡盾构)施工产生的地层损失,以控制盾构施工过程中对土层沉降的影响,为本领域首创。
[0026]
技术方案二
[0027]
一种盾构沉降自动预警方法,其特征在于:基于技术方案一所述算法模型i0/i1/i2/i3及其安全指标数据库[ai,bi],将其嵌入盾构施工信息化系统形成盾构沉降自动预警系统,实时计算出当前i1/i2/i3/i0值,并实时与其安全区间的指标做比对,一旦超出预警区间则由盾构信息化系统自动发出预警信息给相关人员进行盾构施工干预处置,由现场专业人员检查模型中相关盾构施工参数并逐步调整,直至i1/i2/i3/i0恢
复到安全区间[ai,bi],当i1/i2/i3/i0∈[ai,bi],则完成盾构安全预警处置,由此实现盾构施工和穿越对地面和周边构建筑沉降的安全管控。
[0028]
技术方案三
[0029]
一种盾构沉降智能控制及分布式控制网络,其特征在于,由盾构信息化管理平台、智能盾构机群组成,所述智能盾构机群的各个盾构施工智能体分布于全国各地工程现场;各个盾构施工智能体在盾构施工沉降控制中采用了【出渣平衡比+盾体填充率+盾尾填充率+地层损失控制系数】的“3+1”模型来表征地层损失,以此来设计盾构自动沉降控制系统和运行于盾构信息化管理平台的用于风险监测和预警的盾构沉降自动预警系统。
[0030]
各个智能盾构机既能独立控制并能安全穿越施工地面,保证周边建筑地面的安全;同时,分布式的智能盾构机群,汇集全国各地工程现场作业数据,积累形成施工作业数据库(安全指标数据库),形成宝贵丰富的施工数据样本,为进一步的“智能”进化提供可能。
[0031]
当智能体的“大脑”因故障失效时,启动盾构信息化平台对智能体的“盾构沉降自动预警系统”算法功能,赢得作业时间,避免延误工期。同时,更换智能体硬件,同时快速从盾构信息化平台下载“复制”到该智能体,使之快速再造出智能盾构机。
附图说明
[0032]
图1为盾构设备刀盘区、盾体区和盾尾区的三个区域构成示意图
[0033]
图2为盾构沉降智能控制及分布式控制网络构成和业务关系示意图
[0034]
图3:图2中盾构信息化管理平台对每个智能盾构机沉降监测和预警
[0035]
图4:图2中盾构智能体及其盾构沉降自动控制系统
具体实施方式
[0036]
以下结合附图、盾构机通识和实施应用例对本发明技术方案做进一步介绍。
[0037]
业内盾构机工作原理及施工介绍:
[0038]
盾构机通常有泥水平衡盾构机和土压平衡盾构机两种基本类型,主要构成由刀盘系统、盾体系统(前盾、中盾和尾盾)、拼装系统、推进系统、出渣系统、同步注浆系统、克泥效注入系统、控制系统、数据采集系统、导向系统等组成,其中泥水盾构机的出渣系统由泥水循环系统和泥水分离站等组成,土压盾构机的出渣系统由螺旋机和皮带机系统组成。盾构机上配置有通讯系统、plc控制系统、数据采集系统和人机操作界面,将盾构机上各仪表、传感器和执行机构的各类数据和指令集中在司机操作室内,各类执行机构一般可通过本地机具控制面板或操作室控制面板进行操作。
[0039]
刀盘系统旋转开挖切屑土体,盾体系统保护盾构机内的空间并支撑盾构机内的设备和仪器,拼装系统用以安装隧道管片形成地下隧道,推进系统主要由推进油缸组成用以推动盾构机向前移动,出渣系统将刀盘切屑下来的土体转移运输到盾构机外面,若为泥水盾构机则用泥水循环系统以泥水的形式将渣土经泥水管路携带至地面泥水分离站然后进行外运处理,若为土压盾构机则用螺旋机将刀盘区的渣土运输至皮带机运输系统上然后由运输小车运出隧道进行处理。
[0040]
随着行业发展,例如上海市域铁路项目上超大直径盾构机的刀盘开挖直径比盾体直径大50-60mm,以利于减少盾体前进过程中的摩擦力,而因此形成了盾体区的建筑空隙,
该敏感地段该空隙需要及时填充以减少土体和地面的沉降,一般由克泥效系统从盾体向外注入填充物,克泥效系统由布设有动力电机、克泥效注入泵、搅拌箱、流量计和压力表和控制面板等仪器组成;再例如机场线联络线上盾构机的盾尾直径比管片外径大370-410mm,而因此形成了盾尾区的建筑空隙,该空隙须实时填充以控制土体和地面的沉降,该空隙由同步注浆系统实时注入砂浆填充,同步注浆系统由液压动力单元、同步注浆泵、计数传感器、压力传感器、控制面板等组成。
[0041]
本发明算法模型的理论依据和应用方向:
[0042]
在盾构正常施工过程中,控制地层损失本质上应实时控制盾构施工所形成的的建筑空隙,按盾构机特征盾构施工所形成的空隙可分为三个区域:刀盘区、盾体区和盾尾区,如图1。在刀盘区,应有以盾构泥水循环(或土压盾构机则为螺旋机出土)和盾构推进速度的匹配,确保刀盘区切屑掌子面泥土量与泥水循环系统排渣量相等,以确保刀盘开挖的空隙及时被机头前移填充;在盾体区,应有克泥效等盾体填充物注入量与盾构推进速度的匹配(以克泥效为例),以确保形成的盾体空隙及时被填充;在盾尾区,应有同步注浆填充注入与盾构推进速度的匹配,以确保形成的盾尾空隙及时被填充。本发明通过与盾构施工参数直接关联来控制以上三个区域的空隙被实时及时填充,实现了盾构施工中的地层损失实时控制,也就从本质上实时控制住了盾构施工土体或地面沉降。
[0043]
本发明首次公开的盾构沉降控制模型:
[0044]
泥水平衡盾构机,模型为:
[0045][0046][0047][0048][0049]
土压平衡盾构机,模型为:
[0050][0051][0052][0053][0054]
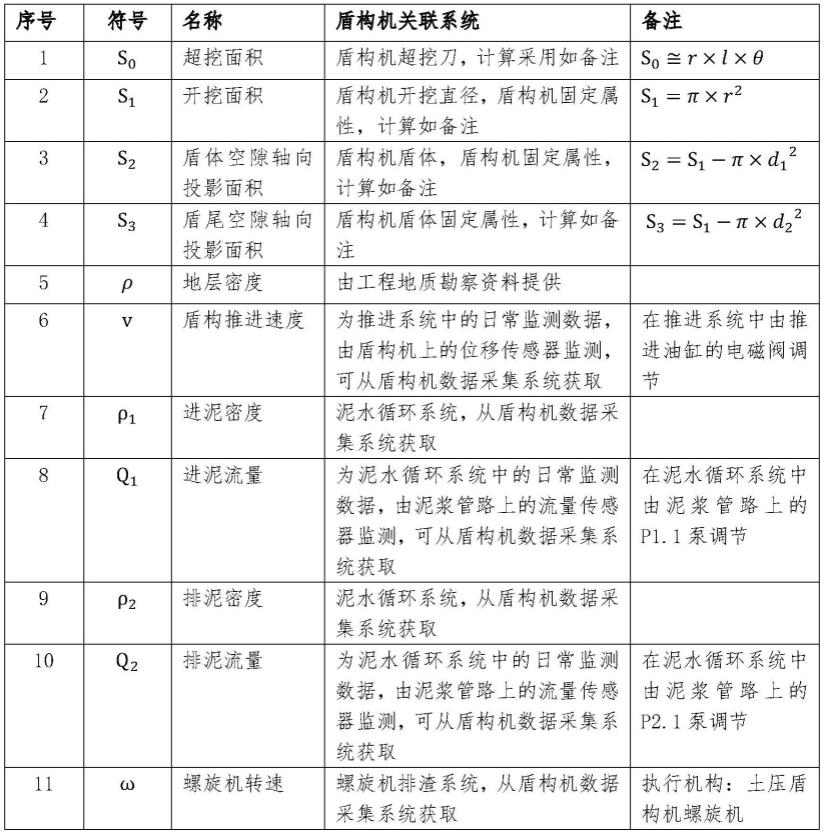
上述模型中公式所涉及参数的具体描述和采集途径如下(表1):
[0055][0056][0057]
注:1,r为刀盘开挖直径,l为超挖刀伸出量,θ为超挖角;
[0058]
2,s1=π
×
r2,s2=s
1-π
×d12
,s3=s
1-π
×d22
,其中r为刀盘开挖半径,d1为盾体直径,d2为管片外径;
[0059]
3,β为倾斜系数,为渣土填充系数,ρ为地质密度,d为螺旋机叶片有效半径,h为螺旋机螺距
[0060]
本发明算法模型推导过程(即理论验证):
[0061]
(以克泥效为例)
[0062]
步骤一 在刀盘区,切屑掌子面泥土量与泥水循环系统排渣量相等,泥水平衡盾构有公式1确定,土压平衡盾构有公式2确定:
[0063]
公式1:(s0×
v+s1×
v)
×
ρ=ρ2×q2-ρ1×
q1[0064]
公式2:(s0×
v+s1×
v)
×
ρ=ω
×m[0065]
步骤二 在盾体区,应有克泥效等盾体填充注入量与盾构推进速度的匹配,由公式3确定:
[0066]
公式3:
[0067]
步骤三 在盾尾区,应有同步注浆填充注入与盾构推进速度的匹配,由公式4确定:
[0068]
公式4:
[0069]
步骤四 依据三区总体积累加以上公式,分别得到公式5和公式6:
[0070]
公式5:公式5:——泥水平衡盾构
[0071]
公式6:公式6:——土压平衡盾构
[0072]
步骤五 将公式1、公式2、公式3、公式4、公式5和公式6做转换如下:
[0073]
公式7:i1为出渣平衡比,适用于泥水平衡盾构
[0074]
公式8:i1为出渣平衡比,适用于土压平衡盾构
[0075]
公式9:i2为盾体填充率
[0076]
公式10:i3为盾尾填充率
[0077]
公式11:i0为地层损失控制系数,适用于泥水平衡盾构
[0078]
公式12:i0为地层损失控制系数,适用于土压平衡盾构。
[0079]
步骤六 由以上i1/i2/i3/i0算法公式组成【出渣平衡比+盾体填充率+盾尾填充率+地层损失控制系数】的“3+1”模型,以取代地层损失率来控制盾构施工产生的地层损失。基于本发明算法模型,并将其植入盾构信息化管理平台或甚至嵌入盾构机plc系统或植入硬
件后与盾构机控制系统交互,通过相关参数实时采集,信息化平台或盾构机可实时计算出i1/i2/i3/i0值。
[0080]
步骤七 理想情况下i1/i2/i3/i0的指标应该等于1,然而地质情况、盾构埋深、盾构填充材料及其配比等对以上指标也有着一定的影响,根据不同地质情况归纳出不同地质和工况下的安全控制指标范围i1/i2/i3/i0=ii∈[ai,bi],ai,bi分别为ii的安全区间的下限值和上限值,并可经过多项目的数据积累建立软土不同地质不同埋深下的安全指标数据库[ai,bi]。一般情况下,据初步施工经验和结合经济性考量,ii可初步取值如i1∈[0.9,1.1],i2∈[0,1.1],i3∈[1.1,1.3],i0∈[1,1.2]。随着盾构施工本发明中相关数据的积累增多,该安全指标数据库经过进一步修正和丰富,可更精准指导不同地质和工况下的盾构施工和风险管控。
[0081]
步骤八 将以上“3+1”算法模型i1/i2/i3/i0及安全指标数据库[ai,bi]嵌入盾构施工信息化系统,实现实时计算出当前i1/i2/i3/i0值。当ii超出预警区间则由盾构信息化系统自动发出预警信息给相关人员进行盾构施工干预处置,由现场专业人员检查模型中相关盾构施工参数并逐步调整,直至i1/i2/i3/i0恢复到安全区间[ai,bi],当ii∈[ai,bi],则完成盾构安全预警处置,由此实现盾构施工和穿越对地面和周边构建筑的安全管控。
[0082]
步骤九 将以上“3+1”算法模型i1/i2/i3/i0,转换成计算机代码语言嵌入盾构机plc系统或者单独植入一个硬件系统与盾构机plc系统交互,组成盾构机沉降自动控制系统,自动实现i1/i2/i3/i0的精细化控制,当时,该自动控制系统自动发出指令通过plc系统启动盾构机相关执行机构进行负反馈调整,直至由此实现盾构机自动化沉降控制技术的革命性突破。
[0083]
实施例3一种盾构沉降智能控制及分布式控制网络
[0084]
由盾构信息化管理平台、智能盾构机群组成,所述智能盾构机群的各个盾构施工智能体分布于全国各地工程现场;
[0085]
在施工现场服役的智能沉降控制盾构机,其控制室设有plc控制系统、数据采集系统、沉降自动控制系统,同时智能沉降控制盾构机上布设有分别用于监测推进系统、泥水循环系统、克泥效注入系统、同步注浆系统运行状态的各类传感器,以及与调控各个系统运行状态所对应的执行机构;
[0086]
服务于项目管理的盾构信息化平台,设置有盾构机数据库、地质勘察信息库、地理信息系统(gis系统)、施工作业数据库、沉降自动预警系统;沉降自动预警系统与盾构机数据库、施工作业数据库、地质勘察信息库连接;
[0087]
所述盾构机数据库包括注册服役的盾构机、购置或者租赁盾构机装备信息、备案的各个盾构机对应的配置文件、任务所在地地理位置信息;所述配置文件预制有前盾直径d1,尾盾直径d2,超挖角θ,刀盘开挖直径r,超挖刀伸出量l等参数信息;
[0088]
分布式的智能盾构机,其机载的各类传感器实时获取的当前工况及设备运行数据,并存储至数据采集系统,并经由数据采集系统同步上传至施工作业数据库;所述数据采集系统上传来的当前工况及设备运行数据包括盾构推进速度v、进泥密度ρ1、排泥密度ρ2、进泥流量q1、排泥流量q2、盾体注入单孔注入流量同步注浆单孔注入流量
[0089]
同时,施工作业数据库还包括安全指标数据库;所述安全指标数据库存储和积累有适用于不同地质和盾构机机型的指标阈值[ai,bi];所述安全指标数据库中更新指标阈值[ai,bi];所述安全指标数据库还包括推荐的调控指标目标值ki等参数信息,所述调控指标目标值ki在指标阈值[ai,bi]范围内;
[0090]
所述地质勘察信息库包括工程地质勘察资料,含地层密度ρ;
[0091]
所述盾构沉降自动预警系统包括计算系统、风险判定及预警系统;所述计算系统包括算法模型;所述计算系统调取各个盾构机对应的所述配置文件信息,计算得到超挖面积s0、开挖面积s1、盾体空隙轴向投影面积s2、盾尾空隙轴向投影面积s3;所述计算系统将计算得到的各个盾构机对应的超挖面积s0、开挖面积s1、盾体空隙轴向投影面积s2、盾尾空隙轴向投影面积s3以及各个盾构机当前工况及设备运行数据一并输入所述算法模型,运行后得到当前i1/i2/i3/i0值;所述风险判定及预警系统利用当前i1/i2/i3/i0值,对照安全指标数据库中的指标阈值[ai,bi],对比后判断当前现场盾构机的施工运行状态:
[0092]
当ii超出预警区间则通过盾构信息化平台发出预警提示以及模型中相关盾构施工参数操作提示,指导相关人员进行盾构施工干预处置,由持有操作客户端的现场专业人员检查模型中相关盾构施工参数并逐步调整,在控制室通过plc控制系统调整相应的执行机构;
[0093]
循环闭合反馈;
[0094]
直至各类传感器实时获取的当前工况及设备运行数据提供到盾构信息化平台系统,当前的i1/i2/i3/i0恢复到安全区间[ai,bi],即当ii∈[ai,bi],则盾构沉降自动预警系统执行完成盾构安全预警处置;
[0095]
各地在役智能沉降控制盾构机,其沉降自动控制系统向盾构信息化平台向下载或者请求推送计算系统、安全指标数据库中当前最新的指标阈值、所在地位置的地层密度ρ、配置文件;所述盾构沉降自动控制系统分别连接所在智能沉降控制盾构机本地plc控制系统、数据采集系统,所述plc控制系统受盾构沉降自动控制系统的控制;
[0096]
所述数据采集系统收集和存储底层的各类传感器获取的当前工况及设备运行数据,包括盾构推进速度v、进泥密度ρ1、排泥密度ρ2、进泥流量q1、排泥流量q2、盾体注入单孔注入流量同步注浆单孔注入流量
[0097]
所述计算系统调取所述配置文件信息,计算得到超挖面积s0、开挖面积s1、盾体空隙轴向投影面积s2、盾尾空隙轴向投影面积s3;所述计算系统将计算得到的超挖面积s0、开挖面积s1、盾体空隙轴向投影面积s2、盾尾空隙轴向投影面积s3以及数据采集系统提供的当前工况及设备运行数据一并输入所述算法模型,运行后得到当前ii值(包括i1/i2/i3/i0值),即表征当前盾构机的施工运行状态:
[0098]
仅当ii≠ki,则盾构沉降自动控制系统根据算法模型中相关盾构施工参数调控plc控制系统,由plc控制系统调整相应的执行机构;
[0099]
循环闭合反馈,不断负反馈逼近并最终稳定于ii=ki,使得盾构沉降自动控制系统自适应调整进入最优的安全作业状态。
[0100]
各个智能盾构机既能独立控制并能安全穿越施工地面,保证周边建筑地面的安全;同时,分布式的智能盾构机群,汇集全国各地工程现场作业数据,积累形成施工作业数
据库(安全指标数据库),形成宝贵丰富的施工数据样本,为进一步的“智能”进化提供可能。
[0101]
盾构信息化平台与分布式的智能盾构机群之间形成数据通信,监测和管控全国各地各个盾构施工和穿越地面和周边构建筑的作业情况。
[0102]
另一种实施方式:盾构信息化平台,将全球地质勘察资料信息建库,并通过互联网或者通信模块为与之建立业务连接的盾构机智能体下载所在地的地层密度ρ;任务执行开工前,每个待服役的智能体将盾构机属性信息和地球位置信息上传至盾构信息化平台的“盾构机数据库”并在地理信息系统(gis系统)上标记出起始位置,返回获得“盾构机数据库”中的编号id,写入盾构机的采集信息系统,同时返回所在位置的地层密度ρ,写入配置文件中。
[0103]
当智能体的“大脑”因故障失效时,启动盾构信息化平台对智能体的“盾构沉降自动预警系统”算法功能,赢得作业时间,避免延误工期。同时,更换智能体硬件,同时快速从盾构信息化平台下载“复制”到该智能体,使之快速再造出智能盾构机。
[0104]
作为实施例,本技术技术方案还可以包括操作客户端;举例而非限定,可以为手机、pad等移动客户端,也可以为pc终端。所述盾构信息化平台的使用页面可显示当前i1/i2/i3/i0值;所述操作客户端可以接收、查阅和显示当前i1/i2/i3/i0值。
[0105]
作为实施例,盾构机控制室wifi ap热点、通信模块等,用于与外部的手机、pad、pc等互联网终端连接。
[0106]
盾构机控制室内,所述人机使用界面可显示当前i1/i2/i3/i0值;同时,通过盾构沉降自动控制系统通信模块,外部的互联网终端可以接收、查阅和显示当前i1/i2/i3/i0值。
[0107]
作为实施例,推荐ki=1/2(ai,+bi)。
[0108]
本发明创新
[0109]
核心原创之处在于,本发明提出了算法模型。
[0110]
本发明核心的原创算法组成了【出渣平衡比+盾体填充率+盾尾填充率+地层损失控制系数】的“3+1”盾构沉降控制模型,为全新盾构沉降控制模型,该模型能实时、准确和有效地反映盾构施工地层损失控制情况,从根本上解决了当前盾构沉降理论的局限性,为盾构沉降自动化控制技术提出了关键技术路径,因此必然具有新颖性、创造性和先进性,对盾构工程安全风险管控具有重大的革命性的科学指导意义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1