一种液压支架安全支护状态的检测及调整方法
1.本发明涉及液压支架位姿检测技术领域,尤其是一种液压支架安全支护状态的检测及调整方法。
背景技术:
2.液压支架作为井下综采工作面的关键支护设备,其智能化水平直接影响着工作面的安全生产效率,当前液压支架无法根据顶板的性状变化和自身的支护姿态进行自主位姿监测与调节,需要人工进行频繁的干预,无法满足智能化开采中液压支架智能安全支护的要求。目前已有研究中缺少基于液压支架理论位姿与实际位姿偏差的支架安全支护状态的研究,缺少将液压支架位姿监测与液压支架支撑力相结合的安全支护状态判断;同时,目前研究中缺乏对于液压支架理论位姿与实际位姿偏差程度的研究,因而没有基于偏差程度的定量液压支架安全支护位姿调整方法。
技术实现要素:
3.本发明旨在解决上述问题,提供了一种液压支架安全支护状态的检测及调整方法,其采用的技术方案如下:
4.一种液压支架安全支护状态的检测及调整方法,包括以下步骤:
5.s1.测量掩护梁、前连杆及后连杆的倾斜角度,以及各立柱的长度、倾斜角度和内腔压力值;
6.s2.根据各立柱的长度差距判断液压支架位姿倾斜程度,根据各立柱的倾斜角度判断液压支架的扭转情况,根据各立柱的内腔压力值判断液压支架的偏载情况;
7.s3.建立液压支架数学模型,得到液压支架掩护梁、前连杆、后连杆及各立柱在不同支护高度的理论倾斜角度;
8.s4.将液压支架掩护梁、前连杆、后连杆及各立柱的实际倾斜角度与理论倾斜角度进行差值比较,得到姿态偏差系数,判断液压支架姿态偏差程度;
9.s5.计算液压支架顶梁各点处理论最大承受压力和实际支撑力,判断顶梁各点的承载情况;
10.s6.根据步骤s2中得到的液压支架的倾斜程度、扭转情况及偏载情况,调整各立柱的长度。
11.在上述方案的基础上,顶梁上设置顶梁角度传感器,测量顶梁相对于底座水平面的倾斜角度掩护梁上设置掩护梁角度传感器,测量掩护梁相对于底座水平面的倾斜角度前连杆及后连杆上分别设置前连杆角度传感器及后连杆角度传感器,用以测量前连杆和后连杆相对于底座水平面的倾斜角度和前排第一立柱上设置第一角度传感器、第一长度传感器及第一压力传感器,用以测量前排第一立柱相对于底座水平面的倾斜角度立柱长度l
10
及内腔压力前排第二立柱上设置第二角度传感器、第二长度传感器及第
二压力传感器,用以测量前排第二立柱相对于底座水平面的倾斜角度立柱长度l
13
及内腔压力后排第一立柱上设置第三角度传感器、第三长度传感器及第三压力传感器,用以测量后排第一立柱相对于底座水平面的倾斜角度立柱长度l
11
及内腔压力后排第二立柱上设置第四角度传感器、第四长度传感器及第四压力传感器,用以测量后排第二立柱相对于底座水平面的倾斜角度立柱长度l
14
及内腔压力
12.在上述方案的基础上,判断液压支架位姿倾斜程度的步骤包括:
13.s2-1-1.定义正常区间[0,l1]、倾斜区间[l1,l2]及严重倾斜区间[l2,l3];
[0014]
s2-1-2.计算前排第一立柱与前排第二立柱的长度差|l
10-l
13
|,当|l
10-l
13
|在[0,l1]区间内时判定液压支架前部未发生倾斜,当|l
10-l
13
|在[l1,l2]区间内时判定液压支架前部发生倾斜,当|l
10-l
13
|在[l2,l3]区间内时判定液压支架前部发生严重倾斜;
[0015]
s2-1-3.计算后排第一立柱与后排第二立柱的长度差|l
11-l
14
|,当|l
11-l
14
|在[0,l1]区间内时判定液压支架后部未发生倾斜,当|l
11-l
14
|在[l1,l2]区间内时判定液压支架后部发生倾斜,当|l
11-l
14
|在[l2,l3]区间内时判定液压支架后部发生严重倾斜;
[0016]
判断液压支架位姿扭转情况的步骤包括:
[0017]
s2-2-1.定义正常区间[0,φ1]、扭转区间[φ1,φ2]及严重扭转区间[φ2,φ3];
[0018]
s2-2-2.计算前排第一立柱与前排第二立柱相对于底座水平面的倾斜角度当在[0,φ1]区间内时判定液压支架前部未发生扭转,当在[φ1,φ2]区间内时判定液压支架前部发生扭转,当在[φ2,φ3]区间内时判定液压支架前部发生严重扭转;
[0019]
s2-2-3.计算后排第一立柱与后排第二立柱相对于底座水平面的倾斜角度当在[0,φ1]区间内时判定液压支架后部未发生扭转,当在[φ1,φ2]区间内时判定液压支架后部发生扭转,当在[φ2,φ3]区间内时判定液压支架后部发生严重扭转;
[0020]
判断液压支架偏载情况的步骤包括:
[0021]
s2-3-1.定义正常区间[0,γ1]、偏载区间[γ1,γ2]及严重偏载区间[γ2,γ3];
[0022]
s2-3-2.计算前排第一立柱与前排第二立柱内腔压力差当在[0,γ1]区间内时判定液压支架前部未发生偏载,当在[γ1,γ2]区间内时判定液压支架前部发生偏载,当在[γ2,γ3]区间内时判定液压支架前部发生严重偏载;
[0023]
s2-3-3.计算后排第一立柱与后排第二立柱内腔压力差当在[0,γ1]区间内时判定液压支架后部未发生偏载,当在[γ1,γ2]区间内时判定液压支架后部发生偏载,当在[γ2,γ3]区间内时判定液压支架后部发生严重偏载;
[0024]
将液压支架的倾斜程度、扭转情况及偏载情况判断结果发送至上位机,上位机将非正常结果进行报警并调整各立柱的长度。
[0025]
优选地,步骤s3具体包括:
[0026]
s3-1.简化液压支架结构理论模型,定义理论模型中θ1为后连杆与底座水平面的夹角、θ2为前连杆与底座水平面的夹角、θ3为掩护梁与底座水平面的夹角、θ4为顶梁与底座水平面的夹角、θ5为后排立柱与底座水平面的夹角、θ6为前排立柱与底座水平面的夹角、l1为底座上前排立柱与后排立柱之间的距离、l2为底座上后排立柱与前连杆下端垂直投影点之间的距离、l3为底座上前连杆下端垂直投影点与后连杆下端垂直投影点之间的距离、l4为后连杆长度、l5为前连杆长度、l6为掩护梁上前连杆铰接点与后连杆铰接点之间的距离、l7为掩护梁剩余距离、l8为顶梁上后排立柱铰接点与掩护梁铰接点之间的距离、l9为顶梁上前排立柱铰接点与后排立柱铰接点之间的距离、l
10
为前排立柱长度、l
11
为后排立柱长度、l
12
为顶梁端部与前排立柱铰接点之间的距离;
[0027]
s3-2.建立液压支架闭环矢量方程
[0028][0029]
s3-3.将变量θi表示为解的预估值与一个表示预估值与方程解之差的微小修正因子δθi之和,即
[0030][0031]
s3-4.运用泰勒级数展开方程
[0032][0033]
s3-5.运用牛顿-辛普森方法求解上述非线性超越方程,略去泰勒展开式中的高阶项,只用线性项,未知量估计值与方程精确解之间的差值δθi可解得为:
[0034][0035]
式中[j]为方程组的jacobian矩阵;
[0036]
s3-6.根据式(1)至式(4)解得θ1~θ6的值,得到液压支架掩护梁、前连杆、后连杆及各立柱在不同支护高度的理论倾斜角度。
[0037]
在上述方案的基础上,步骤s4包括:
[0038]
s4-1.定义液压支架各关键部件理论倾斜角度与实际倾斜角度之差与理论倾斜角度之比为液压支架姿态偏差系数,记为δi,即
[0039][0040]
s4-2.定义正常位姿角度区间偏差位姿角度区间及严重偏差位姿角度区间
[0041]
s4-3.当δi落入区间时认为该结构位姿未发生偏差,当δi落入区间时认为该结构位姿发生偏差,当δi落入区间时认为该结构位姿发生严重偏差;
[0042]
s4-4.将液压支架的位姿偏转情况判断结果发送至上位机,上位机将非正常结果进行报警并调整结构长度。
[0043]
优选地,步骤s5具体包括:
[0044]
s5-1.定义顶梁延伸方向为x向,垂直于顶梁延伸方向为y向;定义g1为顶梁重力,取受力点在顶梁中点处;p1为前排立柱支撑力;p2为后排立柱支撑力;f
x
为距顶梁与掩护梁铰接点x处顶梁所受的力;-f
ex
、-f
ey
为顶梁受掩护梁x向和y向的分力;p1=p1s;p2=p2s,其中p1、p2分别为液压支架前排立柱下腔和后排立柱下腔的压力,s为立柱下腔面积;
[0045]
s5-2.对掩护梁和顶梁铰接点列力偶矩平衡方程可得,
[0046]fx
x+g1(l8+l9+l
12
)/2-p1(l8+l9)sinθ
6-p2l8sinθ5=0
ꢀꢀ
(6)
[0047]
其中f
x
即距顶梁与掩护梁铰接点距离为x处的顶梁所承载的力,
[0048]
解得
[0049][0050]
s5-3.将立柱最大下腔压力p代入式(7),即可求得顶梁各点所能承受的理论最大支撑力为
[0051][0052]
将实际测得的掩护梁、前连杆及后连杆的倾斜角度,以及各立柱的长度、倾斜角度和内腔压力值代入式(7),求得顶梁各点所能承受的实际支撑力为
[0053][0054]
s5-4.定义顶梁各点处所受实际压力与理论最大支撑力之比为此点的承载系数,记为η
x
,即:
[0055][0056]
在上述方案的基础上,步骤s5还包括:
[0057]
s5-5.在顶梁长度区间内取x1、x2…
x9、x
10
等10个点,取此10点的承载系数平均值作为液压支架整体的承载系数η,即
[0058][0059]
s5-6.定义轻载区间[0,λ1]、满载区间[λ1,1]及过载区间[1,λ2];
[0060]
s5-7.当η落在[0,λ1]区间时认为液压支架为轻载,当η落在[λ1,1]区间时认为液压
支架为满载,当η落在区间[1,λ2]时认为液压支架为过载;
[0061]
s5-8.将液压支架的承载情况判断结果发送至上位机,上位机将非正常结果进行报警。
[0062]
优选地,步骤s6具体包括:
[0063]
s6-1.定义ξ1>ξ2>ξ3>0;
[0064]
s6-2.计算前排第一立柱与前排第二立柱的长度差(l
10-l
13
);当(l
10-l
13
)在区间[-ξ1,-ξ2]内时,由上位机控制前排第一立柱伸长l1或前排第二立柱缩短l1;当(l
10-l
13
)在区间[-ξ2,-ξ3]内时,由上位机控制前排第一立柱伸长l2或前排第二立柱缩短l2;当(l
10-l
13
)在区间[-ξ3,0]内时,由上位机控制前排第一立柱伸长l3或前排第二立缩短l3;当(l
10-l
13
)在区间[0,ξ3]内时,由上位机控制前排第一立柱缩短l3或前排第二立柱伸长l3;当(l
10-l
13
)在区间[ξ3,ξ2]内时,由上位机控制前排第一立柱缩短l2或前排第二立柱伸长l2;当(l
10-l
13
)在区间[ξ2,ξ1]内时,由上位机控制前排第一立柱缩短l1或前排第二立柱伸长l1;
[0065]
s6-3.根据步骤s6-2的方法调整后排第一立柱与后排第二立柱的长度;
[0066]
s6-4.根据各立柱调整后的结果,实时采集各立柱的长度,以及液压支架的倾斜程度、扭转情况及偏载情况,对各立柱长度进行负反馈调节,重复步骤s6-2及s6-3。
[0067]
优选地,根据步骤s4中得到的液压支架掩护梁、前连杆、后连杆及各立柱的实际倾斜角度与理论倾斜角度的差值比较结果,调整掩护梁、前连杆、后连杆及各立柱的长度。
[0068]
本发明的有益效果为:通过建立液压支架的数学模型,计算液压支架在不同支撑高度各关键部件的理论位置,与传感器测量的实际位置进行比对,通过减小理论位置与实际位置两者之间的偏差,并通过负反馈调节,当液压支架位姿出现偏差时自动调整液压支架的位姿,提高液压支架的安全支护性能,同时减少井下工作人员,推进工作面无人化、智能化建设,提高综采工作面支护的稳定性和安全性。
附图说明
[0069]
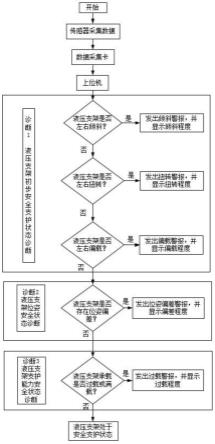
图1:本发明液压支架安全支护状态检测方法流程图;
[0070]
图2:本发明液压支架安全支护状态调整方法流程图;
[0071]
图3:本发明液压支架结构及传感器布置图;
[0072]
图4:本发明另一视角液压支架结构及传感器布置图;
[0073]
图5:本发明液压支架结构理论模型图;
[0074]
图6:本发明顶梁受力分析图。
具体实施方式
[0075]
下面结合附图和实施例对本发明作进一步说明:
[0076]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0077]
在本发明的描述中,需要理解的是,术语“中心”、“长度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0078]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0079]
如图1及图2所示,一种液压支架安全支护状态的检测及调整方法,包括以下步骤:
[0080]
s1.测量掩护梁21、前连杆31及后连杆33的倾斜角度,以及各立柱的长度、倾斜角度和内腔压力值;如图3至图4所示,液压支架顶梁11上设置顶梁角度传感器12,测量顶梁11相对于底座81水平面的倾斜角度掩护梁21上设置掩护梁角度传感器22,测量掩护梁21相对于底座水平面的倾斜角度前连杆31及后连杆33上分别设置前连杆角度传感器32及后连杆角度传感器34,用以测量前连杆31和后连杆33相对于底座81水平面的倾斜角度和前排第一立柱41上设置第一角度传感器42、第一长度传感器43及第一压力传感器44,用以测量前排第一立柱41相对于底座81水平面的倾斜角度立柱长度l
10
及内腔压力前排第二立柱51上设置第二角度传感器52、第二长度传感器53及第二压力传感器54,用以测量前排第二立柱51相对于底座81水平面的倾斜角度立柱长度l
13
及内腔压力后排第一立柱61上设置第三角度传感器62、第三长度传感器63及第三压力传感器64,用以测量后排第一立柱61相对于底座81水平面的倾斜角度立柱长度l
11
及内腔压力后排第二立柱71上设置第四角度传感器72、第四长度传感器73及第四压力传感器74,用以测量后排第二立柱71相对于底座81水平面的倾斜角度立柱长度l
14
及内腔压力
[0081]
s2.根据各立柱的长度差距判断液压支架位姿倾斜程度,根据各立柱的倾斜角度判断液压支架的扭转情况,根据各立柱的内腔压力值判断液压支架的偏载情况;
[0082]
判断液压支架位姿倾斜程度的步骤包括:
[0083]
s2-1-1.定义正常区间[0,l1]、倾斜区间[l1,l2]及严重倾斜区间[l2,l3];
[0084]
s2-1-2.计算前排第一立柱41与前排第二立柱51的长度差|l
10-l
13
|,当l
10-l
13
|在[0,l1]区间内时判定液压支架前部未发生倾斜,当|l
10-l
13
|在[l1,l2]区间内时判定液压支架前部发生倾斜,当|l
10-l
13
|在[l2,l3]区间内时判定液压支架前部发生严重倾斜;
[0085]
s2-1-3.计算后排第一立柱61与后排第二立柱71的长度差|l
11-l
14
|,当|l
11-l
14
|在[0,l1]区间内时判定液压支架后部未发生倾斜,当|l
11-l
14
|在[l1,l2]区间内时判定液压支架后部发生倾斜,当|l
11-l
14
|在[l2,l3]区间内时判定液压支架后部发生严重倾斜;
[0086]
判断液压支架位姿扭转情况的步骤包括:
[0087]
s2-2-1.定义正常区间[0,φ1]、扭转区间[φ1,φ2]及严重扭转区间[φ2,φ3];
[0088]
s2-2-2.计算前排第一立柱41与前排第二立柱51相对于底座81水平面的倾斜角度当在[0,φ1]区间内时判定液压支架前部未发生扭转,当在[φ1,φ2]区间内时判定液压支架前部发生扭转,当在[φ2,φ3]区间内时判定液压支架前部发生严重扭转;
[0089]
s2-2-3.计算后排第一立柱61与后排第二立柱71相对于底座81水平面的倾斜角度当在[0,φ1]区间内时判定液压支架后部未发生扭转,当在[φ1,φ2]区间内时判定液压支架后部发生扭转,当在[φ2,φ3]区间内时判定液压支架后部发生严重扭转;
[0090]
判断液压支架偏载情况的步骤包括:
[0091]
s2-3-1.定义正常区间[0,γ1]、偏载区间[γ1,γ2]及严重偏载区间[γ2,γ3];
[0092]
s2-3-2.计算前排第一立柱41与前排第二立柱51内腔压力差当在[0,γ1]区间内时判定液压支架前部未发生偏载,当在[γ1,γ2]区间内时判定液压支架前部发生偏载,当在[γ2,γ3]区间内时判定液压支架前部发生严重偏载;
[0093]
s2-3-3.计算后排第一立柱61与后排第二立柱71内腔压力差当在[0,γ1]区间内时判定液压支架后部未发生偏载,当在[γ1,γ2]区间内时判定液压支架后部发生偏载,当在[γ2,γ3]区间内时判定液压支架后部发生严重偏载;
[0094]
将液压支架的倾斜程度、扭转情况及偏载情况判断结果发送至上位机,上位机将非正常结果进行报警并调整各立柱的长度。
[0095]
s3.建立液压支架数学模型,得到液压支架掩护梁21、前连杆31、后连杆33及各立柱在不同支护高度的理论倾斜角度;该步骤具体包括:
[0096]
s3-1.简化液压支架结构理论模型,如图5所示,定义理论模型中θ1为后连杆与底座水平面的夹角、θ2为前连杆与底座水平面的夹角、θ3为掩护梁与底座水平面的夹角、θ4为顶梁与底座水平面的夹角、θ5为后排立柱与底座水平面的夹角、θ6为前排立柱与底座水平面的夹角、l1为底座81上前排立柱与后排立柱之间的距离、l2为底座81上后排立柱与前连杆31下端垂直投影点之间的距离、l3为底座81上前连杆31下端垂直投影点与后连杆33下端垂直投影点之间的距离、l4为后连杆33长度、l5为前连杆31长度、l6为掩护梁21上前连杆31铰接点与后连杆33铰接点之间的距离、l7为掩护梁21剩余距离、l8为顶梁11上后排立柱铰接点与掩护梁铰接点之间的距离、l9为顶梁11上前排立柱铰接点与后排立柱铰接点之间的距离、l
10
为前排立柱长度、l
11
为后排立柱长度、l
12
为顶梁11端部与前排立柱铰接点之间的距离;
[0097]
s3-2.建立液压支架闭环矢量方程
[0098][0099]
s3-3.将变量θi表示为解的预估值与一个表示预估值与方程解之差的微小修正因子δθi之和,即
[0100][0101]
s3-4.运用泰勒级数展开方程
[0102][0103]
s3-5.运用牛顿-辛普森方法求解上述非线性超越方程,略去泰勒展开式中的高阶项,只用线性项,未知量估计值与方程精确解之间的差值δθi可解得为:
[0104][0105]
式中[j]为方程组的jacobian矩阵;
[0106]
s3-6.根据式(1)至式(4)解得θ1~θ6的值,得到液压支架掩护梁21、前连杆31、后连杆33及各立柱在不同支护高度的理论倾斜角度。
[0107]
s4.将液压支架掩护梁21、前连杆31、后连杆33及各立柱的实际倾斜角度与理论倾斜角度进行差值比较,得到姿态偏差系数,判断液压支架姿态偏差程度;该步骤具体包括:
[0108]
s4-1.定义液压支架各关键部件理论倾斜角度与实际倾斜角度之差与理论倾斜角度之比为液压支架姿态偏差系数,记为δi,即
[0109][0110]
s4-2.定义正常位姿角度区间偏差位姿角度区间及严重偏差位姿角度区间
[0111]
s4-3.当δi落入区间时认为该结构位姿未发生偏差,当δi落入区间时认为该结构位姿发生偏差,当δi落入区间时认为该结构位姿发生严重偏差;
[0112]
s4-4.将液压支架的位姿偏转情况判断结果发送至上位机,上位机将非正常结果进行报警并调整结构长度。
[0113]
s5.计算液压支架顶梁11各点处理论最大承受压力和实际支撑力,判断顶梁11各点的承载情况;该步骤具体包括:
[0114]
s5-1.如图6所示,定义顶梁11延伸方向为x向,垂直于顶梁11延伸方向为y向;定义g1为顶梁11重力,取受力点在顶梁11中点处;p1为前排立柱支撑力;p2为后排立柱支撑力;f
x
为距顶梁与掩护梁铰接点x处顶梁所受的力;-f
ex
、-f
ey
为顶梁11受掩护梁21x向和y向的分力;p1=p1s;p2=p2s,其中p1、p2分别为液压支架前排立柱下腔和后排立柱下腔的压力,s为立柱下腔面积;
[0115]
s5-2.对掩护梁21和顶梁11铰接点列力偶矩平衡方程可得,
[0116]fx
x+g1(l8+l9+l
12
)/2-p1(l8+l9)sinθ
6-p2l8sinθ5=0
ꢀꢀ
(6)
[0117]
其中f
x
即距顶梁11与掩护梁21铰接点距离为x处的顶梁11所承载的力,
[0118]
解得
[0119][0120]
s5-3.将立柱最大下腔压力p代入式(7),即可求得顶梁11各点所能承受的理论最大支撑力为
[0121][0122]
将实际测得的掩护梁21、前连杆31及后连杆33的倾斜角度,以及各立柱的长度、倾斜角度和内腔压力值代入式(7),求得顶梁11各点所能承受的实际支撑力为
[0123][0124]
s5-4.定义顶梁各点处所受实际压力与理论最大支撑力之比为此点的承载系数,记为η
x
,即:
[0125][0126]
s6.根据步骤s2中得到的液压支架的倾斜程度、扭转情况及偏载情况,调整各立柱的长度;该步骤具体包括:
[0127]
s6-1.定义ξ1>ξ2>ξ3>0;
[0128]
s6-2.计算前排第一立柱41与前排第二立柱51的长度差(l
10-l
13
);当(l
10-l
13
)在区间[-ξ1,-ξ2]内时,由上位机控制前排第一立柱41伸长l1或前排第二立柱51缩短l1;当(l
10-l
13
)在区间[-ξ2,-ξ3]内时,由上位机控制前排第一立柱41伸长l2或前排第二立柱51缩短l2;当(l
10-l
13
)在区间[-ξ3,0]内时,由上位机控制前排第一立柱41伸长l3或前排第二立柱51缩短l3;当(l
10-l
13
)在区间[0,ξ3]内时,由上位机控制前排第一立柱41缩短l3或前排第二立柱51伸长l3;当(l
10-l
13
)在区间[ξ3,ξ2]内时,由上位机控制前排第一立柱41缩短l2或前排第二立柱51伸长l2;当(l
10-l
13
)在区间[ξ2,ξ1]内时,由上位机控制前排第一立柱41缩短l1或前排第二立柱51伸长l1;
[0129]
s6-3.根据步骤s6-2的方法调整后排第一立柱61与后排第二立柱71的长度;
[0130]
s6-4.根据各立柱调整后的结果,实时采集各立柱的长度,以及液压支架的倾斜程度、扭转情况及偏载情况,对各立柱长度进行负反馈调节,重复步骤s6-2及s6-3。
[0131]
s7.根据步骤s4中得到的液压支架掩护梁21、前连杆31、后连杆33及各立柱的实际倾斜角度与理论倾斜角度的差值比较结果,调整掩护梁21、前连杆31、后连杆33及各立柱的
长度;
[0132]
以顶梁11的姿态调整为例,顶梁11的理论倾斜角度为θ4、实际倾斜角度为且定义顶梁上仰时θ4>0,顶梁下倾时θ4<0,定义
[0133]
当顶梁11上仰,即θ4>0时:计算理论倾斜角度与实际倾斜角度差值当在区间内时,由上位机控制前排立柱缩短l4或后排立柱伸长l4;当在区间内时,由上位机控制前排立柱缩短l5或后排立柱伸长l5;当在区间内时,由上位机控制前排立柱缩短l6或后排立柱伸长l6;当在区间内时,由上位机控制前排立柱伸长l6或后排立柱缩短l6;当在区间内时,由上位机控制前排立柱伸长l5或后排立柱缩短l5;当在区间内时,由上位机控制前排立柱伸长l4或后排立柱缩短l4;
[0134]
同理当顶梁11下倾,即θ4<0时,重复上述计算分析过程,并进行相反的调整动作。调整完成后,通过传感器实时采集位姿信息,并进行负反馈调节,重复上述步骤。
[0135]
上面以举例方式对本发明进行了说明,但本发明不限于上述具体实施例,凡基于本发明所做的任何改动或变型均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1