一种用于地质勘察的取样装置的制作方法
1.本发明涉及地质勘察技术领域,具体是一种用于地质勘察的取样装置。
背景技术:
2.地质勘察是运用测绘、地球物理勘探、地球化学探矿、钻探、坑探、采样测试、地质遥感等地质勘察方法,对一定地区内的岩石、地层构造、矿产、地下水、地貌等地质情况进行的调查研究工作。地质勘察工作是建筑工程项目建设的重要基础,而岩石地区不同于一般地区,各种岩石构造复杂,地质勘察作业的难度大,稍有不慎,就可能导致勘察作业出现较大失误,从而给建筑工程建设埋下安全隐患。地质勘察的手段方法比较多,一般常用的如钻探、井探、触探等,虽然不同的手段勘察的特点不同,但是,都离不开专业精密的勘测设备,其中地质勘察钻探取样工作容易对样本造成破坏从而会对取样结果产生影响,尤其是在获取土壤样品时遇到土质松散的区域采样时会给采样工作带来一定的困难,同时取样区域处于复杂地形环境下时取样装置运输又成为一大难题,现有取样设备通常都不易运输需耗费大量人力物力才能到达取样点,如何解决复杂地形下设备运输困难问题以及缺少轻便化设备的问题对提高地质勘察中取样效率以及减少耗费人力劳动有重要意义。
技术实现要素:
3.本发明的目的在于提供一种用于地质勘察的取样装置,根据取样-提拉一体化思路结合自动化技术,通过结合地形实况与定位系统测算出到达取样区域的最佳路线,利用gps导航技术结合实况地形图集可对导航路线进行优化,实现无人运输的取样需要;在一定程度上提高了地质勘察中取样效率以及减少了耗费人力劳动,可以有效解决背景技术中的问题。
4.为实现上述目的,本发明提供如下技术方案:一种用于地质勘察的取样装置,包括用于地质勘察提取土壤样品的钻探取样单元以及用于将钻探取样单元从地下提升至地面的提拉上升单元、用于将钻探取样单元运输至采样区域的定位导向单元和用于控制取样装置运行的控制单元,所述钻探取样单元包括有起钻进作用的钻头,所述钻头上方与钻杆螺纹连接,所述钻杆的上方连接有连接头,所述连接头上方连接有用于控制所述钻头钻进取样的振动装置,所述振动装置设置有软管接口用于连接软管,所述软管缠绕连接在软管轴上,所述软管轴一端与所述振动装置可拆卸连接,另一端与连接中枢固定连接,所述振动装置的两侧设置有手柄,所述手柄与所述振动装置之间设置有用于减振的垫块,所述提拉上升单元包括连接在取样装置上表面的连接件,所述连接件的上方设置有支撑杆,用于支撑若干旋叶的运行提供充足的运行空间,所述定位导向单元包括位于取样装置两侧表面的联轴器,所述联轴器一端固定连接有所述连接中枢,另一端连接有用于控制方向的机械臂,所述机械臂的底部连接有底座,所述底座下方连接有用于地面导向行驶的万向轮,所述控制单元包括用于采集取样路程中的实况图像的摄像头、具有定位功能的定位装置和起控制作用的驱动器,所述控制单元下方连接有所述连接中枢,所述控制单元通过控制所述连接中
枢的转向以及运行来控制取样装置的取样工作。
5.作为本发明再进一步的方案:所述钻探取样单元采用的是声频振动采样的方法来对采样区进行取样工作,采样区域的地形复杂问题若采用大型采样机械会面临机械难以搬运的问题以及搬运工作耗时耗力机械受损问题,所以采用声振系统能够在保证采样工作正常进行的情况下提高装置轻便性,所述钻探取样单元中起取样控制作用的是所述振动装置,所述振动装置包括连接在所述软管轴的提拉环,取样完成后由于所述软管的柔软伸缩性质在由所述提拉上升单元的提拉过程会导致提拉工作晃动导致样品受损,因此设置有所述提拉环连接在所述软管轴上。所述软管轴与所述连接中枢连接,通过提拉上升单元带动所述连接中枢的向上提拉,从而可以控制取样提拉工作的稳定进行。
6.作为本发明再进一步的方案:所述振动装置包括为取样工作提供动力的动力系统,所述动力系统下方连接有声振发生装置用于提供采样所需的声振频率,所述声振发生装置下方连接有调速装置,所述声振发生装置提供的频率可能达不到取样速率标准,所以设置有所述调速装置用于控制取样速率,防止取样速率不稳定导致取样工作对样品造成损伤以致使样品无法被完整取出。
7.作为本发明再进一步的方案:所述垫块和所述手柄为一种辅助机构,取样过程中会发生机械振动,所以设置有所述手柄用于采样工作人员手动辅助取样装置采样的稳定性,同时为了防止机械振动过大对采样工作人员不利所以设置有所述垫块用于缓冲取样装置对采样工作人员的作用力。
8.作为本发明再进一步的方案:所述连接件固定连接在取样装置表面,所述连接件的上方是用于支撑若干所述旋叶运行的支撑杆,所述支撑杆的底端设置有驱动若干所述旋叶运行的驱动装置,所述支撑杆的顶端设置有四方延伸的杆架用于连接所述旋叶,所述提拉上升单元通过驱动若干所述旋叶的运行可带动下方取样装置主体向上飞行运动,可在前往取样区域的途中遇障碍物,通过所述提拉上升单元的提拉运动避开障碍物从而减少人力清除障碍物的工作,并且在取样钻具完成取样需要将钻具从地下提拉上来时可以控制所述旋叶的旋转运行速度来提升取样装置,省去了单独携带提拉机构的工作步骤,将取样-提拉一体化减少了人力运输的强度。
9.作为本发明再进一步的方案:所述定位导向单元具有自动行驶功能系统还包括人为手动遥控系统,自动行驶功能主要由所述控制单元采集实况地形图像以及定位导航系统通过所述驱动器控制所述连接中枢的运行将驾驶指令传达至所述定位导向单元,所述定位导向单元通过驾驶指令控制所述机械臂的运行方向,所述机械臂是一种可伸缩的管臂,取样地形复杂在运载空间不够充分的情况下可以调节所述机械臂的长度来节省空间,所述机械臂的底端连接有底座用于连接所述万向轮,所述万向轮与所述底座灵活连接并且所述万向轮的表面材质是一种耐磨损材质,因为取样区域多为凹凸不平的地面并且地面多有尖锐石块所以需要所述万向轮的表面材质为耐磨损材料防止所述万向轮的运行受损而导致取样装置在地面行驶受阻。
10.作为本发明再进一步的方案:所述控制单元为取样装置的核心控制中心,通过结合地形实况与定位系统测算出到达取样区域的最佳路线,所述摄像头位于取样装置表面同时所述摄像头可在取样装置表面环绕滑行以达到对地形图像的全方位采集的目的,所述定位装置是一种坐标定位系统,通过定位取样区域坐标利用gps导航技术可选出到达取样点
的导航路线,同时结合实况地形图集可及时对导航路线进行优化将不断优化的导航路线数据信号传输至所述驱动器,由所述驱动器下达指令将指令传输至各个模块实现取样装置自动化,同时为保证取样装置的安全运行可配置远程遥控装置,在取样装置无法自行运输取样时可由采样工作人员遥控采样装置的工作运行。
11.作为本发明再进一步的方案,一种用于地质勘察的取样装置,包括如下使用步骤:步骤一:准备工作,在取样装置运行前检查控制单元是否处于正常工作状态以及检查各单元之间的传输连接是否畅通,同时检查取样装置各连接处的磨损状态,防止存在连接处磨损导致装置运行出现故障;步骤二:待安全检查工作完成,打开控制单元的开关,通过结合地形实况与定位系统测算出到达取样区域的最佳路线,由位于取样装置表面的摄像头采集地形实况图像同时摄像头可在取样装置表面环绕滑行以达到对地形图像的全方位采集的目的,另外定位装置是一种坐标定位系统,通过定位取样区域坐标利用gps导航技术可选出到达取样点的导航路线,同时结合实况地形图集可及时对导航路线进行优化将不断优化的导航路线数据信号传输至驱动器,由驱动器下达指令将指令传输至各个模块实现取样装置自动化,同时为保证取样装置的安全运行可配置远程遥控装置,在取样装置无法自行运输取样时可由采样工作人员遥控采样装置的工作运行;步骤三:根据优化路线导向由定位导向单元将取样装置导航驾驶至取样点,定位导向单元通过驾驶指令控制所述机械臂的运行方向,所述机械臂是一种可伸缩的管臂,取样地形复杂在运载空间不够充分的情况下可以调节所述机械臂的长度来节省空间,所述机械臂的底端连接有底座用于连接所述万向轮,所述万向轮与所述底座灵活连接并且所述万向轮的表面材质是一种耐磨损材质,因为取样区域多为凹凸不平的地面并且地面多有尖锐石块所以需要所述万向轮的表面材质为耐磨损材料防止所述万向轮的运行受损而导致取样装置在地面行驶受阻;步骤四:待到达取样点后,采用声频振动采样的方法来对采样区进行取样工作,采用声振系统能够在保证采样工作正常进行的情况下提高装置轻便性,所述钻探取样单元中起取样控制作用的是所述振动装置,所述振动装置包括连接在所述软管轴的提拉环,取样完成后,由于所述软管的柔软伸缩性质在由所述提拉上升单元的提拉过程会导致提拉工作晃动,导致样品受损所以设置有所述提拉环连接在所述软管轴上,所述软管轴与所述连接中枢连接通过所述提拉上升单元带动所述连接中枢的向上提拉从而可以控制取样提拉工作的稳定进行,同时振动装置还包括为取样工作提供动力的动力系统,所述动力系统下方连接有声振发生装置用于提供采样所需的声振频率,所述声振发生装置下方连接有调速装置,所述声振发生装置提供的频率可能达不到取样速率标准,所以设置有所述调速装置用于控制取样速率,防止取样速率不稳定导致取样工作对样品造成损伤以致使样品无法被完整取出,钻探取样单元还包括垫块和手柄,所述垫块和所述手柄为一种辅助机构,取样过程中会发生机械振动所以设置有所述手柄用于采样工作人员手动辅助取样装置采样的稳定性,同时为了防止机械振动过大对采样工作人员不利所以设置有所述垫块用于缓冲取样装置对采样工作人员的作用力;步骤五:将钻探取样样品提拉至地面,提拉上升单元中包括连接件,所述连接件固定连接在取样装置表面,所述连接件的上方是用于支撑若干所述旋叶运行的支撑杆,所述
支撑杆的底端设置有驱动若干所述旋叶运行的驱动装置,所述支撑杆的顶端设置有四方延伸的杆架用于连接所述旋叶,所述提拉上升单元通过驱动若干所述旋叶的运行可带动下方取样装置主体向上飞行运动,可在前往取样区域的途中遇障碍物通过所述提拉上升单元的提拉运动避开障碍物从而减少人力清除障碍物的工作,并且在取样钻具完成取样需要将钻具从地下提拉上来时可以控制所述旋叶的旋转运行速度来提升取样装置,省去了单独携带提拉机构的工作步骤,将取样-提拉一体化减少了人力运输的强度。
12.与现有技术相比,本发明的有益效果是:根据取样-提拉一体化思路结合自动化技术,通过结合地形实况与定位系统测算出到达取样区域的最佳路线,利用gps导航技术结合实况地形图集可对导航路线进行优化可以实现无人运输的取样需要,在一定程度上提高了地质勘察中取样效率以及减少了耗费人力劳动。
附图说明
13.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
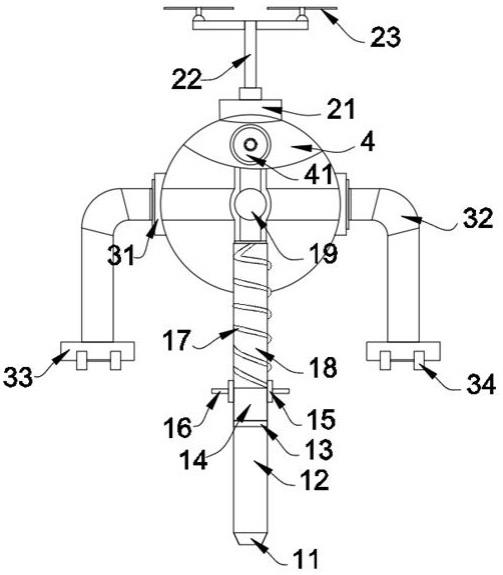
14.图1为一种用于地质勘察的取样装置的正立面结构示意图;图2为一种用于地质勘察的取样装置的侧立面结构示意图;图3为一种用于地质勘察的取样装置的俯视结构示意图;图4为一种用于地质勘察的取样装置中振动装置的结构示意图。
15.图中:1、钻探取样单元;11、钻头;12、钻杆;13、连接头;14、振动装置;141、提拉环;142、动力系统;143、调速装置;144、声振发生装置;145、软管接口;15、垫块;16、手柄;17、软管;18、软管轴;19、连接中枢;2、提拉上升单元;21、连接件;22、支撑杆;23、旋叶;3、定位导向单元;31、联轴器;32、机械臂;33、底座;34、万向轮;4、控制单元;41、摄像头;42、定位装置;43、驱动器。
具体实施方式
16.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
17.实施例:请参阅图1-图4,本发明实施例中,一种用于地质勘察的取样装置,包括用于地质勘察提取土壤样品的钻探取样单元(1)以及用于将钻探取样单元(1)从地下提升至地面的提拉上升单元(2)、用于将钻探取样单元(1)运输至采样区域的定位导向单元(3)和用于控制取样装置运行的控制单元(4),钻探取样单元(1)包括有起钻进作用的钻头(11),钻头(11)上方与钻杆(12)螺纹连接,钻杆(12)的上方连接有连接头(13),连接头(13)上方连接有用于控制钻头(11)钻进取样的振动装置(14),振动装置(14)设置有软管接口(145)用于连接软管(17),软管(17)缠绕连接在软管轴(18)上,软管轴(18)一端与振动装置(14)可拆卸连接,另一端与连接中枢(19)固定连接,振动装置(14)的两侧设置有手柄(16),手柄(16)
与振动装置(14)之间设置有用于减振的垫块(15),提拉上升单元(2)包括连接在取样装置上表面的连接件(21),连接件(21)的上方设置有支撑杆(22)用于支撑若干旋叶(23)的运行提供充足的运行空间,定位导向单元(3)包括位于取样装置两侧表面的联轴器(31),联轴器(31)一端固定连接有连接中枢(19),另一端连接有用于控制方向的机械臂(32),机械臂(32)的底部连接有底座(33),底座(33)下方连接有用于地面导向行驶的万向轮(34),控制单元(4)包括用于采集取样路程中的实况图像的摄像头(41)、具有定位功能的定位装置(42)和起控制作用的驱动器(43),控制单元(4)下方连接有连接中枢(19),控制单元(4)通过控制连接中枢(19)的转向以及运行来控制取样装置的取样工作。
18.如图1-图4所示,本发明还提供一种用于地质勘察的取样装置的使用方法,所示具体步骤如下:步骤一:准备工作,在取样装置运行前检查控制单元(4)是否处于正常工作状态以及检查各单元之间的传输连接是否畅通,同时检查取样装置各连接处的磨损状态,防止存在连接处磨损导致装置运行出现故障;步骤二:待安全检查工作完成,打开控制单元(4)的开关,通过结合地形实况与定位系统测算出到达取样区域的最佳路线,由位于取样装置表面的摄像头(41)采集地形实况图像同时摄像头(41)可在取样装置表面环绕滑行以达到对地形图像的全方位采集的目的,另外定位装置(42)是一种坐标定位系统,通过定位取样区域坐标利用gps导航技术可选出到达取样点的导航路线,同时结合实况地形图集可及时对导航路线进行优化将不断优化的导航路线数据信号传输至驱动器(43),由驱动器(43)下达指令将指令传输至各个模块实现取样装置自动化,同时为保证取样装置的安全运行可配置远程遥控装置,在取样装置无法自行运输取样时可由采样工作人员遥控采样装置的工作运行;步骤三:根据优化路线导向由定位导向单元(3)将取样装置导航驾驶至取样点,定位导向单元(3)通过驾驶指令控制机械臂(32)的运行方向,机械臂(32)是一种可伸缩的管臂,由于取样地形复杂在运载空间不够充分的情况下可以调节机械臂(32)的长度来节省空间,机械臂(32)的底端连接有底座(33)用于连接万向轮(34),万向轮(34)与底座(33)灵活连接并且万向轮(34)的表面材质是一种耐磨损材质,因为取样区域多为凹凸不平的地面并且地面多有尖锐石块所以需要万向轮(34)的表面材质为耐磨损材料防止万向轮(34)的运行受损而导致取样装置在地面行驶受阻;步骤四:待到达取样点后,采用声频振动采样的方法来对采样区进行取样工作,由于采样区域的地形复杂问题若采用大型采样机械会面临机械难以搬运的问题以及搬运工作耗时耗力机械受损问题,所以采用声振系统能够在保证采样工作正常进行的情况下提高装置轻便性,钻探取样单元(1)中起取样控制作用的是振动装置(14),振动装置(14)包括连接在软管轴(18)的提拉环(141),取样完成后由于软管(17)的柔软伸缩性质在由提拉上升单元(2)的提拉过程会导致提拉工作晃动导致样品受损所以设置有提拉环(141)连接在软管轴(18)上,软管轴(18)与连接中枢(19)连接通过提拉上升单元(2)带动连接中枢(19)的向上提拉,从而可以控制取样提拉工作的稳定进行,同时振动装置(14)还包括为取样工作提供动力的动力系统(142),动力系统(142)下方连接有声振发生装置(144)用于提供采样所需的声振频率,声振发生装置(144)下方连接有调速装置(143),声振发生装置(144)提供的频率可能达不到取样速率标准,所以设置有调速装置(143)用于控制取样速率,防止取样
速率不稳定导致取样工作对样品造成损伤以致使样品无法被完整取出,钻探取样单元(1)还包括垫块(15)和手柄(16),垫块(15)和手柄(16)为一种辅助机构,由于取样过程中会发生机械振动,所以设置有手柄(16)用于采样工作人员手动辅助取样装置采样的稳定性,同时为了防止机械振动过大对采样工作人员不利所以设置有垫块(15)用于缓冲取样装置对采样工作人员的作用力;步骤五:将钻探取样样品提拉至地面,提拉上升单元(2)中包括连接件(21),连接件(21)固定连接在取样装置表面,连接件(21)的上方是用于支撑若干旋叶(23)运行的支撑杆(22),支撑杆(22)的底端设置有驱动若干旋叶(23)运行的驱动装置,支撑杆(22)的顶端设置有四方延伸的杆架用于连接旋叶(23),提拉上升单元(2)通过驱动若干旋叶(23)的运行可带动下方取样装置主体向上飞行运动,可在前往取样区域的途中遇障碍物通过提拉上升单元(2)的提拉运动避开障碍物从而减少人力清除障碍物的工作,并且在取样钻具完成取样需要将钻具从地下提拉上来时可以控制旋叶(23)的旋转运行速度来提升取样装置,省去了单独携带提拉机构的工作步骤,将取样-提拉一体化减少了人力运输的强度。
19.本发明的工作原理是:根据取样-提拉一体化思路结合自动化技术,通过结合地形实况与定位系统测算出到达取样区域的最佳路线,利用gps导航技术结合实况地形图集可对导航路线进行优化可以实现无人运输的取样需要在一定程度上提高了地质勘察中取样效率以及减少了耗费人力劳动。
20.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1