一种挂网机械臂及其锚杆台车的制作方法
1.本实用新型涉及隧道支护中的挂网设备技术领域,特别是指一种挂网机械臂及其锚杆台车。
背景技术:
2.采矿施工作业中,为了保障人员和设备施工的安全,常常需要在开掘的隧道岩壁上打锚杆、加装网片,以加固隧道岩壁,防止碎石松动。目前的锚杆施工作业中,网片的加装还是以人工为主,这时需要搭建作业平台,人员搬动网片登上作业平台,通过手动方式将网片送到需要加固的岩壁上。人工加装网盘不仅施工效率低,平台作业还会对人身安全产生很大威胁。
3.现有的网片加装装置,如公开号为:cn 214273690 u的独立伸缩挂网机械装置,虽然能在一定程度上提高工作效率,但是其灵活性、适用性差,不能对不同规格的网片进行精确抓取与拼装,进而影响工作效率。
技术实现要素:
4.针对上述背景技术中的不足,本实用新型提出一种挂网机械臂及其锚杆台车,解决了现有技术中网片加装过程中灵活性不佳,致使工作效率低的问题。
5.本实用新型的技术方案是这样实现的:一种挂网机械臂,包括伸缩臂和抓手机构,所述伸缩臂一端设有旋转机构ⅲ、另一端设有旋转机构ⅱ,旋转机构ⅱ与设置在抓手机构底部的旋转机构ⅰ相连接;所述抓手机构包括支撑座体,支撑座体上设有联动式夹爪机构。
6.进一步,所述联动式夹爪机构包括设置在支撑座体上的伸缩油缸和对称设置在支撑座体两端的网爪,伸缩油缸的两端分别通过传动组件与网爪相连接。
7.其中,所述传动组件包括连接臂,连接臂的中部通过销轴铰接在支撑座体上,连接臂的上部与伸缩油缸铰接,连接臂的下部设有与网爪连接的调节板。
8.进一步,所述调节板上设有至少两组安装孔,所述网爪为双头网爪,双头网爪上设有与安装孔对应的连接螺柱,连接螺柱穿过位于同一组的安装孔并通过锁紧螺母固定在调节板上。
9.进一步,所述支撑座体的侧壁上设有与网爪相对应的调节组件,调节组件位于网爪的上极限位置处。作为优选方案,所述调节组件包括固定在支撑座体侧壁上的l型板座,l型板座上螺纹连接有与网爪对应的调节螺栓,通过调节螺栓伸出长度的调节,改变网爪收缩极限位点。
10.进一步,所述支撑座体包括u形底座和两个侧板,两个侧板分别固定在u形底座的两侧,伸缩油缸和联动式夹爪机构均位于两个侧板之间。所述u形底座与旋转机构ⅰ相连接,在旋转机构ⅰ作用下,抓手机构能做绕y轴的转动;在旋转机构ⅱ的作用下,旋转机构ⅰ及抓手机构能做绕x轴的转动,在旋转机构ⅲ的作用下,伸缩臂能做绕x轴的转动。
11.其中,所述伸缩臂包括缸体,缸体内设有杆体,杆体上设有可调节的延长杆,所述
杆体上设有至少一个连接孔,延长杆上设有至少两个调节孔,调节孔与连接孔对应配合且通过螺栓锁紧。
12.一种锚杆台车,包括所述的挂网机械臂,该挂网机械臂通过旋转机构ⅲ连接在锚杆台车的车体上。
13.本实用新型的有益效果为:本实用新型伸缩臂采用三个旋转机构实现与台车及抓手机构的连接,形成挂网机械臂,灵活性高,通过机械臂上的伸缩油缸,旋转油缸协同运动将抓手机构移动到网片的摆放位置,通过伸缩油缸驱动抓手机构两端的网爪伸出、缩回,以勾住或脱离网片钢筋,实现网片的精准抓取与安放,提高了工作效率。网爪转动组件上分别设置两排安装位,可调整两端网爪的安装位置,改变其抓取极限位,以适应对不同网片的快速且稳定抓取。伸缩油缸的一端缸杆有孔位调节功能,通过任意两个安装孔位组合,可调节油缸的安装距,改变网爪转动组件的角度,继而增大或减小两端网爪的间距,满足因焊接误差导致的不规则网片的抓取;提高了机械臂在工程应用时的适用性。本实用新型在锚固作业中,施工人员可操作四自由度机械臂抓取网片,通过机械臂将网片转移到需要加装网片的隧道岩壁上,实现机械化网片搬运与安装,同时作业时远离钻孔作业点,不仅提高了施工效率,还避免了人员和设备安全事故的发生,具有较高的实用性。
附图说明
14.为了更清楚地说明本实用新型实施例,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
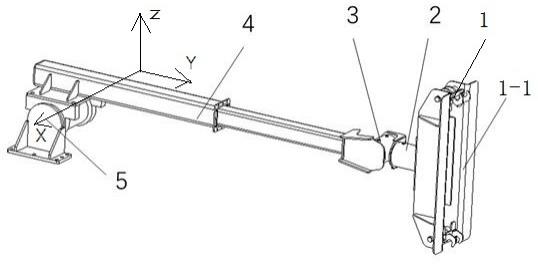
15.图1为本实用新型挂网机械臂结构示意图。
16.图2为本实用新型抓手机构示意图。
17.图3为本实用新型抓手机构爆炸图。
18.图4为实施例2中伸缩油缸结构示意图。
19.图5为抓手机构出现卡滞状态示意图。
20.图6为网爪的两个安装位示意图。
21.图7为型挂网机械臂工作状态示意图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.如图1所示,实施例1,一种挂网机械臂,包括伸缩臂4和抓手机构1,伸缩臂的整体长度可调,抓手机构用于抓取网片。所述伸缩臂4一端设有旋转机构ⅲ5、另一端设有旋转机构ⅱ3,旋转机构ⅱ3与设置在抓手机构1底部的旋转机构ⅰ2相连接。旋转机构ⅰ2、旋转机构ⅱ3及旋转机构ⅲ5配合实现抓手机构多自由度灵活抓取网片和拼装支护。本实施例中的所述抓手机构1包括支撑座体1-1,支撑座体1-1上设有联动式夹爪机构。联动式夹爪机构两端
的抓取部能同时进行抓紧和松开动作,可对不同规格的网片进行快速抓取与安装。在本发明的挂网机械臂中,通过机械臂上的伸缩油缸,旋转油缸协同运动将抓手机构移动到网片的摆放位置,通过伸缩油缸驱动抓手机构两端的网爪伸出、缩回,以勾住或脱离网片钢筋,实现网片的抓取与安放。
24.本实施例中,如图2、3所示,所述联动式夹爪机构包括设置在支撑座体1-1上的伸缩油缸103和对称设置在支撑座体1-1两端的网爪106,伸缩油缸103的两端分别通过传动组件105与网爪106相连接。网爪可为钢筋折弯形式,这样在施工环境恶劣的地方加工便捷,整个结构的成本也较低。伸缩油缸通过传动组件带动网爪106进行抓放运动,用于对网片的快速抓取。其中,作为优选方案,所述传动组件105包括连接臂105-1,连接臂的数量根据需要可设置1个或2个,采用两个连接臂时,连接臂相同且通过轴套连接,连接臂105-1的中部的轴套通过销轴107铰接在支撑座体1-1上,连接臂105-1的上部与伸缩油缸103铰接,连接臂105-1的下部设有与网爪106连接的调节板105-2。网爪在调节板上可有两个安装位点,通过与不同安装位点的连接,可满足工程上常用的四种规格网片抓取,提高了机械臂在工程应用时的通用性。
25.如图6所示,实施例2,一种挂网机械臂,在实施例1的基础上,本实施例中所述调节板105-2上设有至少两组安装孔,一组为一个安装位点,一组包括两个安装孔。所述网爪106为双头网爪,双头网爪上设有与安装孔对应的两个连接螺柱106-1,连接螺柱106-1穿过位于同一组的安装孔并通过锁紧螺母固定在调节板105-2上,连接螺柱通过与不同安装孔的连接,实现其在调节板上位置的改变,完成两端网爪安装位置的调整。内侧两排安装位间距l1,可满足网格间距150mm、250mm两种规格网片的抓取;外侧两排安装位间距l2,可满足网格间距100mm、200mm两种规格网片的抓取。
26.本实施例中所述支撑座体1-1的侧壁上设有与网爪106相对应的调节组件104,调节组件104位于网爪106的上极限位置处。调节组件的数量至少为两个。本实施例中优选为四个,两两一组,一组两个调节组件104对称设置在支撑座两侧壁上且与一个网爪对应。通过调节组件来控制网爪转动组件运动的最终位置,保证两端网爪抓取网片时转动过程的协调统一。
27.具体为所述调节组件104包括固定在支撑座体1-1侧壁上的l型板座104-1,l型板座104-1上螺纹连接有与网爪106对应的调节螺栓104-2,通过调节螺栓104-2伸出长度的调节,改变网爪106收缩极限位点;保证两端网爪抓取网片时转动过程的协调一致,使两个网爪能同时且精确抓取网片。工作时通过人员调整调节组件中螺栓的旋进长度来控制网爪转动组件运动的最终位置,保证了释放网片过程中伸缩油缸伸长,两端网爪转动过程的协调统一,都能旋进侧板中,避免其中一端网爪转动过程卡滞,露出侧板造成无法松开网片。
28.作为优选方案,所述支撑座体1-1包括u形底座101和两个侧板102,两个侧板102分别固定在u形底座101的两侧,伸缩油缸103和联动式夹爪机构均位于两个侧板102之间。所述u形底座101与旋转机构ⅰ2相连接。以图1为准,在旋转机构ⅰ2作用下,抓手机构1能做绕y轴的转动;在旋转机构ⅱ3的作用下,伸缩臂的轴向为y轴方向,竖直方向为z轴方向,垂直yz平面的为x方向。本实施例中旋转机构ⅰ2及抓手机构1能做绕x轴的转动,在旋转机构ⅲ5的作用下,伸缩臂4能做绕x轴的转动,配合伸缩臂在x方向的伸缩及伸缩臂在旋转机构ⅲ5的作用下转动90
°
后在z轴方向上的伸缩形成了挂网机械臂。旋转机构ⅰ,可驱动抓手机构旋转
180
°
,其安装在旋转机构ⅱ上;旋转机构ⅱ可驱动旋转机构ⅰ和抓手机构一同旋转180
°
,其安装在伸缩臂上;伸缩臂,可带动旋转机构ⅱ、旋转机构ⅰ和抓手机构做平移运动,其安装在旋转机构ⅲ上;旋转机构ⅲ,可驱动整个机械臂旋转180
°
,实现机械臂的灵活运动,可实现对网片的高效抓取与安装。旋转机构ⅰ、旋转机构ⅱ及旋转机构ⅲ均由旋转油缸及连接座组成。通过旋转机构ⅲ中的旋转油缸(旋转180
°
),和伸缩臂中的伸缩油缸协同运动能够将抓手机构推到网片抓取位置附近,通过旋转机构ⅱ和旋转机构ⅰ中的两个旋转油缸(各自都能旋转180
°
)还可以进行微调,确保抓手机构处于平行于网片的抓取方位。
29.如图4所示,本实施例中所述伸缩臂4包括缸体401,缸体401内设有杆体402,杆体402上设有可调节的延长杆403,所述杆体402上设有至少一个连接孔404,本实施例中连接孔为2个(a、b孔)。延长杆403上设有至少两个调节孔405,本实施例中调节孔405为3个(a、b、c孔),调节孔405与连接孔404对应配合且通过螺栓锁紧。不同的孔位配合可调节伸缩油缸的安装距,其中缸杆b、c位,缸筒a、b位配合时伸缩油缸的安装距比缸杆a、b位,缸筒a、b位配合时安装距要长。伸缩油缸伸出,网爪转动组件和网爪绕着销轴的旋转,当安装距越长时,伸缩油缸伸出到极限位置,两端网爪之间的间距范围越大,对抓取因焊接误差导致的不规则网片的适用性更强。
30.在锚固作业中,施工人员可通过操作手柄控制机械臂上的伸缩油缸,旋转油缸协同运动将抓手机构移动到网片的摆放位置,然后驱动两端网爪旋转分别挂住网片上的钢筋,最终通过机械臂将网片转运到隧道岩壁上需要安装位置。这样在锚固作业中,施工人员通过操作机械臂搬运网片,同时作业时远离钻孔作业点,不仅提高了施工效率,还避免了人员和设备安全事故的发生。
31.如图5、6、7所示,实施例3,一种锚杆台车,包括所述的挂网机械臂,该挂网机械臂通过旋转机构ⅲ5连接在锚杆台车的车体上。
32.网片的加装流程主要包含四步:
33.第一步,人员调节调节组件104上的螺栓,使其旋进合适的长度,螺栓旋进的端部位置处于网爪转动组件105绕销轴107旋转大约90
°
的位置处。控制机械臂上的旋转机构ⅰ2、旋转机构ⅱ3、伸缩臂4和旋转机构ⅲ5协同运动将抓手机构移动到网片的摆放位置;
34.第二步,人员控制抓手机构1上的伸缩油缸103缩回,驱动两端网爪转动组件105及安装其上的网爪106绕着销轴107旋转,直至两端网爪106分别勾住网片上的钢筋;
35.第三步,人员控制机械臂上的旋转机构ⅰ2、旋转机构ⅱ3、伸缩臂4和旋转机构ⅲ5协同运动,将勾住的网片转运到隧道岩壁上需要安装位置,然后锚杆台车进行钻孔、打锚杆作业。
36.第四步,锚杆台车打锚杆作业后需要松开网片,人员控制抓手机构1上的伸缩油缸103伸长,驱动两端网爪转动组件105及安装其上的网爪106绕着销轴107旋转,正常情况下,两端网爪转动组件105应随着伸缩油缸103伸长同时转动,当伸缩油缸103伸长到极限位置,此时两端网爪转动组件105分别转动大约90
°
,网爪106完全脱离网片缩回到两个侧板102之间。如施工作业中,一端网爪转动组件105遇到卡滞情况,需要一定的驱动力才能驱动其旋转,伸缩油缸103伸长,只有另一端未卡滞的网爪转动组件105会绕着销轴107旋转,此时未卡滞的网爪转动组件105绕着销轴107旋转大约90
°
,触碰到调节组件104上的螺栓后停止转动,随着伸缩油缸103继续伸长,卡滞的网爪转动组件105在足够外力驱动下开始转动,直至
伸缩油缸103伸长到极限位置,卡滞的网爪转动组件105和网爪106也能脱离网片,缩回到两个侧板102之间,完成网片的安装作业。
37.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1