一种掘进机截割控制方法、装置、系统和存储介质与流程
本技术涉及掘进机,特别是涉及一种掘进机截割控制方法、装置、系统和存储介质。
背景技术:
1、掘进机是用于开凿平直地下巷道的机器。掘进机分为开敞式掘进机和护盾式掘进机。主要由行走组织、作业组织、装运组织和转载组织组成。跟着行走组织向前推动,作业组织中的切开头不断破碎岩石,并将碎岩运走。掘进机有着安全、高效和成巷质量好等优点。
2、煤矿行业采煤方式多是由掘进机司机工人在掘进机驾驶室中手动控制截割头升降、左右回转、伸缩来达到截割煤层的效果。在此环境下,煤尘很多,严重危害操作人员健康,而且存在可能会发送煤矿坍塌或者透水事故的风险,危及人员生命安全。
3、因此,煤矿采掘智能化进程中,加大安全投入,减少工作人员的劳动量及改善工作环境,实现掘进机的自动截割是一种必然趋势。为此,市场上已有用于辅助掘进机进行自动截割的方案,例如中国专利文献201811401420.5中公开了一种掘进机截割路径规划方法,该方法具体包括:建立掘进工作面在大地坐标系下的三维模型;获取掘进机的空间位置信息、方位角、位姿信息及各油缸的位移信息,计算掘进机截割头在大地坐标系下的坐标;将掘进机截割头的坐标与掘进工作面的三维模型相结合,根据巷道断面的大小、形状以及煤岩的分布情况和性质,确定掘进机的截割方式、截割头的运动路径和速度;根据掘进机的空间位置变化,调整截割头的运动路径,判断掘进机截割头的截割效果,修正截割头的速度。
4、但是发明人认识到,上述专利文献中所提供的方法,只能根据预先定义好的巷道断面的大小和形状来规划截割路径,无法远程设置巷道情况,以能够根据不同巷道情况来生成不同截割路径,并按照生成的截割路径自动截割成型;另外,该方法只是解决了掘进机截割路径规划的问题,并没有为远程控制掘进机,使掘进机按照规划路线完成截割提供完整的解决方案。
技术实现思路
1、基于此,针对上述技术问题,提供一种掘进机截割控制方法、装置、系统和存储介质,以解决现有掘进机截割路径规划方法无法远程设置巷道情况,以及缺乏能够远程模式下控制掘进机,使掘进机按照规划路线完成截割的完整解决方案的技术问题。
2、为了实现上述目的,本技术提供如下技术方案:
3、第一方面,一种掘进机截割控制方法,包括:
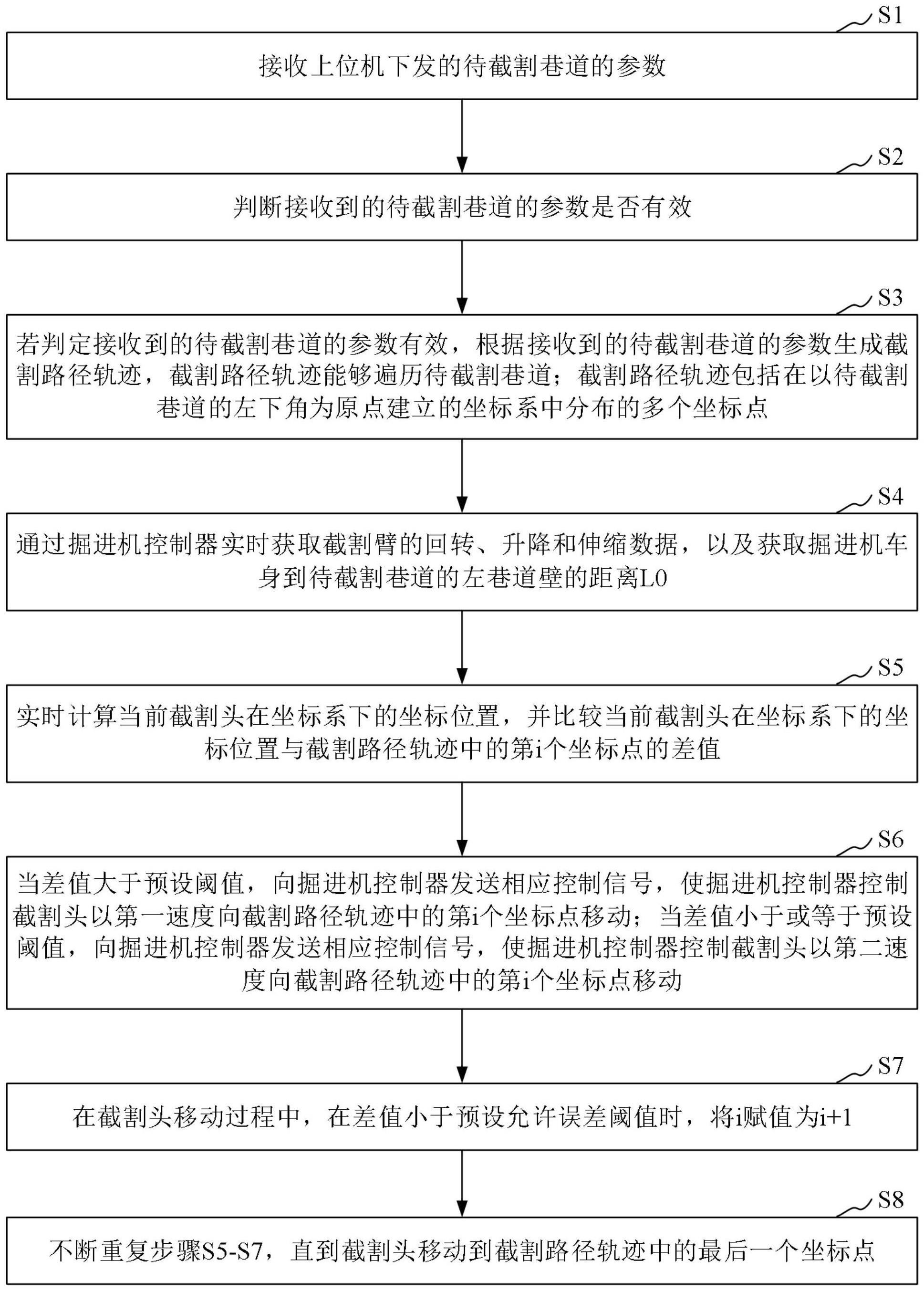
4、s1,接收上位机下发的待截割巷道的参数;
5、s2,判断接收到的所述待截割巷道的参数是否有效;
6、s3,若判定接收到的所述待截割巷道的参数有效,根据接收到的所述待截割巷道的参数生成截割路径轨迹,所述截割路径轨迹能够遍历所述待截割巷道;所述截割路径轨迹包括在以所述待截割巷道的左下角为原点建立的坐标系中分布的多个坐标点;
7、s4,通过掘进机控制器实时获取截割臂的回转、升降和伸缩数据,以及获取掘进机车身到所述待截割巷道的左巷道壁的距离l0;
8、s5,实时计算当前截割头在所述坐标系下的坐标位置,并比较所述当前截割头在所述坐标系下的坐标位置与所述截割路径轨迹中的第i个坐标点的差值;
9、s6,当所述差值大于预设阈值,向掘进机控制器发送相应控制信号,使掘进机控制器控制截割头以第一速度向所述截割路径轨迹中的第i个坐标点移动;当所述差值小于或等于预设阈值,向掘进机控制器发送相应控制信号,使掘进机控制器控制截割头以第二速度向所述截割路径轨迹中的第i个坐标点移动;
10、s7,在截割头移动过程中,在所述差值小于预设允许误差阈值时,将i赋值为i+1;
11、s8,不断重复步骤s5-s7,直到截割头移动到所述截割路径轨迹中的最后一个坐标点。
12、可选地,所述待截割巷道的参数包括待截割巷道的轮廓形状、高度和宽度。
13、可选地,所述获取截割头的回转、升降和伸缩数据,通过设置在掘进机车身上的回转角度传感器、位移传感器和伸缩油缸行程传感器获取;所述掘进机车身到所述待截割巷道的左巷道壁的距离,通过设置在掘进机车身上的激光扫描仪获取。
14、可选地,步骤s3还包括:
15、若判定接收到的所述待截割巷道的参数无效,向上位机发送参数异常提示指令。
16、可选地,所述计算当前截割头在所述坐标系下的坐标位置,包括:
17、将截割臂转动后与掘进机车身中线的夹角定义为∠a,截割臂左转时∠a为正,截割臂右转时∠a为负;
18、将截割臂升降后与回转台平面的夹角定义为∠b,截割臂上升时∠b为正,截割臂下降时∠b为负;
19、将当前截割臂长度定义为l2,l2=截割臂初始长度l1+当前截割臂的油缸伸缩行程;
20、将回转台平面到地面的垂直距离定义为h;
21、计算当前截割头在所述坐标系下的坐标位置(x,y),其中
22、可选地,步骤s6还包括:
23、根据截割头的移动速度,以及所述当前截割头在所述坐标系下的坐标位置与所述截割路径轨迹中的第i个坐标点之间的距离,计算截割头移动到所述截割路径轨迹中的第i个坐标点所需要的时间长度;
24、判断在经过所述时间长度后,所述差值是否大于预设允许误差阈值;
25、若判定所述差值大于预设允许误差阈值,向上位机发送故障提示指令。
26、可选地,所述预设阈值为400mm;所述预设允许误差阈值为30mm。
27、第二方面,一种掘进机截割控制装置,包括:
28、参数接收模块,用于接收上位机下发的待截割巷道的参数;
29、参数判断模块,用于判断接收到的所述待截割巷道的参数是否有效;
30、截割路径轨迹生成模块,用于若判定接收到的所述待截割巷道的参数有效,根据接收到的所述待截割巷道的参数生成截割路径轨迹,所述截割路径轨迹能够遍历所述待截割巷道;所述截割路径轨迹包括在以所述待截割巷道的左下角为原点建立的坐标系中分布的多个坐标点;
31、截割臂数据获取模块,通过掘进机控制器实时获取截割臂的回转、升降和伸缩数据,以及获取掘进机车身到所述待截割巷道的左巷道壁的距离l0;
32、坐标位置计算模块,用于实时计算当前截割头在所述坐标系下的坐标位置,并比较所述当前截割头在所述坐标系下的坐标位置与所述截割路径轨迹中的第i个坐标点的差值;
33、移动控制模块,用于当所述差值大于预设阈值,向掘进机控制器发送相应控制信号,使掘进机控制器控制截割头以第一速度向所述截割路径轨迹中的第i个坐标点移动;当所述差值小于或等于预设阈值,向掘进机控制器发送相应控制信号,使掘进机控制器控制截割头以第二速度向所述截割路径轨迹中的第i个坐标点移动;
34、赋值模块,用于在截割头移动过程中,在所述差值小于预设允许误差阈值时,将i赋值为i+1;
35、遍历模块,用于使坐标位置计算模块、移动控制模块和赋值模块不断重复工作,直到截割头移动到所述截割路径轨迹中的最后一个坐标点。
36、第三方面,一种掘进机截割控制系统,包括
37、上位机;
38、掘进机控制器;
39、自动截割处理器,与所述上位机和掘进机控制器均双向通信连接;
40、存储器,存储有计算机程序;所述自动截割处理器执行所述计算机程序时实现第一方面中任一项所述的方法的步骤。
41、第四方面,一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中任一项所述的方法的步骤。
42、本发明至少具有以下有益效果:
43、本发明实施例提供的一种掘进机截割控制方法中,采用接收上位机下发的待截割巷道的参数;若判定接收到的待截割巷道的参数有效,根据接收到的待截割巷道的参数生成能够遍历待截割巷道的截割路径轨迹;实时计算当前截割头在坐标系下的坐标位置,并比较当前截割头在坐标系下的坐标位置与截割路径轨迹中的第i个坐标点的差值;根据差值是否大于预设阈值,向掘进机控制器发送不同控制信号,使掘进机控制器控制截割头以不同速度向截割路径轨迹中的第i个坐标点移动;在截割头移动过程中,在差值小于预设允许误差阈值时,将i赋值为i+1;不断重复,直到截割头移动到截割路径轨迹中的最后一个坐标点;能够实现通过上位机远程、灵活地设置待截割巷道的参数,以能够根据该参数自动生成相应截割轨迹,然后通过上位机远程控制截割头按照截割轨迹自动截割成形;同时,该方法为远程控制掘进机,使掘进机按照规划路线完成截割提供了一个完整的解决方案。
- 还没有人留言评论。精彩留言会获得点赞!