一种水采船智能化浓度跟踪采矿的方法和系统与流程
本发明涉及水采船智能化浓度跟踪采矿的方法,尤其涉及利用水采船从盐田采收并输送光卤石矿浆的技术。
背景技术:
1、水采船是从盐田中采收并输送光卤石矿浆的采矿设备,主要包括行走机构、采收机构和输送机构,通过行走机构在盐田中按照作业航道行进,在行进中通过采收机构的切割头将盐田底部的光卤石破碎、收集,混合在卤水中形成矿浆,再通过输送机构的初级泵、增压泵等将矿浆输送到加工系统。加工系统对矿浆浓度有一定要求,因此,在采收过程中水采船需要针对加工系统的要求控制矿浆浓度。
2、为了控制矿浆浓度,现有技术采用线性pid定值控制调节矿浆浓度。具体的,按照生产需求确定目标浓度,将浓度计量装置安装在水采船的矿浆入口,采用线性pid定值控制算法控制矿浆浓度。但是这种pid定值控制是线性控制,只适用于在厚度比较均匀的光卤石层的采收。
3、将水采船的行进速度与矿浆浓度相关联,通过调节水采船的行进速度(对切割头的入水深度不作调节,始终保持初始深度)对矿浆浓度进行调节。基于线性pid定值控制矿浆浓度会产生无法正常工作的问题。例如,即当采集到的矿浆浓度过低时,并加快水采船的行进速度,以提高矿浆浓度,当矿浆的浓度过高时,通过降低水采船的行进速度,以降低矿浆浓度。而速度的调节系数是因矿厚度不同而不同的,矿池矿厚度变化较大时,就需整定参数,参数整定会变得非常频繁,而且普通操作人员也无法完成参数整定工作,因为参数不能及时整定,导致系统稳定性、鲁棒性都很差。
4、由于这种线性pid定值控制是线性控制,当水采船位于厚度不均匀的光卤石层时,如图1所示,水采船处于光卤石厚度较薄的区域a,这时即使加快水采船的行进速度至最大值,由于前方的光卤石层可能更薄,并无法使矿浆浓度调节至设定的浓度值,而当矿浆浓度过高时,如果水采船处于光卤石层较厚的区域b,对切割头的深度不作调节,这时即使降低水采船的行进速度,由于前方的光卤石层可能更厚,导致无法使浓度调节至设定浓度,导致线性pid定值控制参数的修正无法达到稳态,从而导致水采船控制机构频繁动作,严重时造成设备烧毁。另外,过高浓度的矿浆容易造成初级泵堵塞,此问题也无法利用该线性pid定值控制方法解决。
5、本发明的目的在于提供一种不受盐田内光卤石层厚度不均匀影响,能够使采收矿浆浓度保持在需要的范围内的水采船智能化浓度跟踪采矿的方法和系统。
技术实现思路
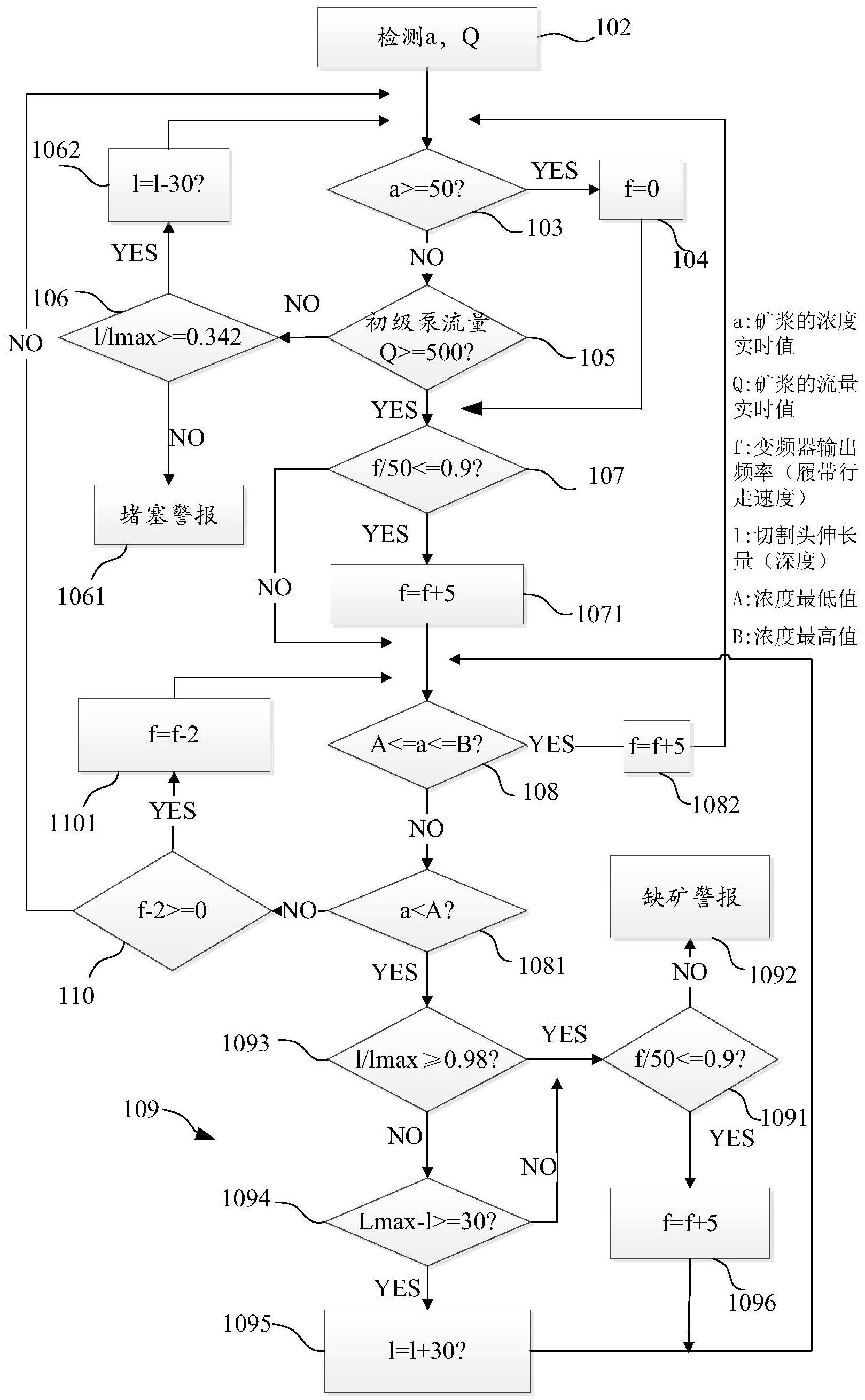
1、为了解决上述问题,本发明提供了一种水采船智能化浓度跟踪采矿的方法,其特征在于,包括,初始设置步骤101,设定水采船的初始速度、切割头的初始深度、矿浆的浓度最低值和浓度最高值,其中,浓度最低值<浓度最高值。采矿步骤:在盐湖移动水采船,利用切割头破碎、收集光卤石,采收包含光卤石的矿浆。检测步骤102,检测矿浆的浓度实时值。浓度比较步骤108,对比浓度实时值与浓度最高值、浓度最低值。
2、水采船控制步骤:当浓度实时值位于浓度最高值和浓度最低值之间时,提高水采船的行进速度,使浓度实时值趋近浓度最高值,当浓度实时值小于浓度最低值时,下压切割头或提高水采船的行进速度,使浓度实时值上升到设置的浓度区间内,当浓度实时值大于浓度最高值时,降低水采船的行进速度,使浓度实时值下降到设置的浓度区间内,使水采船采收的矿浆浓度保持在浓度区间内接近浓度最高值。
3、本发明中矿浆的浓度实时值,当位于浓度最高值和浓度最低值之间时,通过提高水采船的行进速度,加快单位时间内光卤石破碎、收集量,提高矿浆浓度;当小于浓度最低值时,通过下压切割头或提高水采船的行进速度,或者下压切割头的同时也提高水采船的行进速度,增加单位时间内光卤石收集量,提高矿浆浓度;当大于浓度最高值时,通过降低水采船的行进速度,减少单位时间内光卤石的破碎、收集量,降低矿浆浓度。即便水采船在厚度不均匀的光卤石层中进行采收,通过调节水采船的行进速度和切割头入水的深度,也能使水采船采收的矿浆浓度快速保持在需要的范围内。可以解决现有水采船控制方法在光卤石层厚度不均匀的条件下,无法开采所需矿浆浓度,水采船机构易损坏的问题。
4、优选地,初始设置步骤101还包括,设定矿浆的浓度临界值,其中,浓度最低值<浓度最高值<浓度临界值。临界浓度比较步骤(103)还包括,对比浓度实时值与浓度临界值,当浓度实时值大于等于浓度临界值时,水采船控制步骤中,将水采船的行进速度降低为零,保持切割头的当前深度。
5、当浓度实时值大于浓度最高值时,矿浆浓度过高,可能发生堵泵,需要立即降低矿浆浓度,通过使水采船的行进速度降为零,可减少单位时间内光卤石的破碎、收集量,降低矿浆浓度,从而输出稳定的合适浓度的光卤石矿浆。
6、优选地,初始设置步骤101还包括,设定矿浆的流量临界值。检测步骤102还包括,检测矿浆的流量实时值。流量比较步骤105包括,对比流量实时值与流量临界值。水采船控制步骤中,当流量实时值小于流量临界值时,判断切割头是否位于最小深度,如果是,则发出堵塞警报,如果否,抬升切割头。
7、当流量实时值小于流量临界值时,若切割头的深度较深,则可能是矿浆浓度较高导致,抬升切割头可以降低矿浆浓度,防止堵泵,若切割头的深度较浅,可能发生堵泵,报警告知工作人员处理。
8、优选地,水采船控制步骤包括,判断水采船的行进速度是否达到最大速度,如果是,则跳转至浓度比较步骤108,如果否,则提高水采船的行进速度后,跳转至浓度比较步骤108。
9、优选地,水采船控制步骤包括,判断切割头是否位于最大深度,如果否,则增加切割头的深度,跳转至浓度比较步骤108,如果是,则判断水采船的速度是否达到最大速度,如果达到最大速度,则保持速度的同时输出缺矿警报,如果没有达到最大速度,则提高水采船的行进速度后,跳转至浓度比较步骤108。
10、本发明中,由于设置矿浆的浓度区间作为调节目标,可以减少采矿过程的停机和人工干预,提高自动采矿的稳定性和可靠性。将矿浆浓度在浓度区间内不断趋近于最大值,可以提高矿浆的质量。在需要提高矿浆浓度实时值时,优先采用下压切割头的方式,可以对盐田内的光卤石矿采收的更彻底。设置浓度最大值和浓度临界值,可从浓度方面控制堵塞,设置流量临界值,可从流量方面防止堵塞。
11、一种水采船智能化浓度跟踪采矿的系统,包括,设定模块1、矿浆浓度检测模块24、存储模块31、判断模块32、履带控制模块35、切割头控制模块36和采收控制模块37。设定模块1用于设定水采船的初始速度、切割头42的初始深度、矿浆的浓度最低值和浓度最高值,其中,浓度最低值<浓度最高值。存储模块31用于,存储水采船的初始速度、切割头42的初始深度、矿浆的浓度最低值和浓度最高值。
12、采收控制模块37用于控制初级泵和增压泵采收包含光卤石的矿浆。矿浆浓度检测模块24用于检测矿浆的浓度实时值。判断模块32用于对比浓度实时值与浓度最高值、浓度最低值。履带控制模块35用于控制水采船行进,当浓度实时值位于浓度最高值和浓度最低值之间时,提高水采船的行进速度,当浓度实时值小于浓度最低值时,提高水采船的行进速度,当浓度实时值大于浓度最高值时,降低水采船的行进速度;切割头控制模块36用于控制切割头42破碎、收集光卤石,当浓度实时值小于浓度最低值时,下压切割头42;使水采船采集到的矿浆浓度保持稳定。
13、优选地,设定模块1还用于,设定矿浆的浓度临界值,其中,浓度最低值<浓度最高值<浓度临界值。存储模块31还用于,储存矿浆的浓度临界值。判断模块32还用于,对比浓度实时值与浓度临界值。履带控制模块35还用于,当浓度实时值大于等于浓度临界值时,将水采船的行进速度降低为零。切割头控制模块36还用于,当浓度实时值大于等于浓度临界值时,保持切割头42的初始深度。
14、优选地,还包括切割头深度检测模块21、矿浆流量检测模块23和报警模块33,设定模块1还用于,设定矿浆的流量临界值。存储模块31还用于,储存矿浆的流量临界值。切割头深度检测模块21用于,检测切割头的深度。矿浆流量检测模块23用于,检测矿浆的流量实时值。判断模块32还用于,对比流量实时值与流量临界值,判断切割头是否位于最小深度。切割头控制模块36还用于,当流量实时值小于流量临界值,切割头42不是位于最小深度时,抬升切割头42。报警模块33用于,当流量实时值小于流量临界值,切割头42位于最小深度时,发出堵塞警报。
15、优选地,还包括行进速度检测模块22,行进速度检测模块22用于,检测水采船的行进速度。判断模块32还用于,判断水采船的行进速度是否达到最大速度。
16、优选地,还包括切割头深度检测模块21,切割头深度检测模块21用于,检测切割头的深度,判断模块32还用于,判断切割头42是否位于最大深度;报警模块33还用于,当切割头位于最大深度,水采船达到最大行进速度时,发出缺矿警报。
- 还没有人留言评论。精彩留言会获得点赞!