一种用于钢结构架体的基础施工螺旋锚杆钻机的制作方法
本发明输电线路的钢结构架体的基础施工,尤其是涉及一种用于钢结构架体的基础施工螺旋锚杆钻机。
背景技术:
1、软土质或地下水位浅等地区的送电工程基础,通常采用大开挖基础和灌注桩基础,也有少量采用混凝土承台螺旋锚基础。但大开挖基础和混凝土承台螺旋锚基础施工开挖量大、易坍塌、施工工期长、风险高、机械化施工率低,灌注桩基础施工工艺复杂、施工工期长、环境影响大。
2、为此,提出一种新的施工思路,用锚杆钻头旋转入地方式改变原有混凝土承台的方式,然后进行钢承台的安装。在这一施工思路的指导下,如何保证锚杆钻头钻进过程中角度的精确控制就成为技术实现的重点。
3、本申请人在先申请有名称为一种机动灵活的螺旋锚施工装置的实用新型专利,公告号cn216275679u,其技术方案为:钻杆上端的液压马达通过一个铰接轴与托架连接,呈单一铰接点的悬吊结构,上面的挖掘机臂部,不能控制下面螺旋锚的入地角度。具体来说就是托架1与动力组件3的安装关系是悬吊的结构。
4、对于螺旋锚来说,入地的角度有设计要求,单一铰接点基本是没办法控制下面悬吊的钻杆的入地角度。该结构在下压于螺旋锚钻杆的时候,不能保证下压力与于螺旋锚钻杆的轴向一致,很容易产生横向分力把钻杆推偏,单靠挖掘机的驾驶员的操作能力是很难控制的,角度不好把握准确,可靠性也不高,也难于准确控制角度。另外在钻进过程中,也无法保钻杆的角度不会再发生偏转。现有的配合解决思路是需要现场辅助设施来控制螺旋锚钻杆的入地角度,但由于钻进的现场环境,调整效果很不好,且不安全。
5、因此,上述方案实现不了入地角度的自动调整和控制,有违该装备的设计目的,有必要进行改进和提升,以实现对钻杆入地角度的整体可控。
技术实现思路
1、本发明的为了解决现有技术中的问题,提供一种用于钢结构架体的基础施工螺旋锚杆钻机。
2、为实现上述目的,本发明采用如下技术方案:
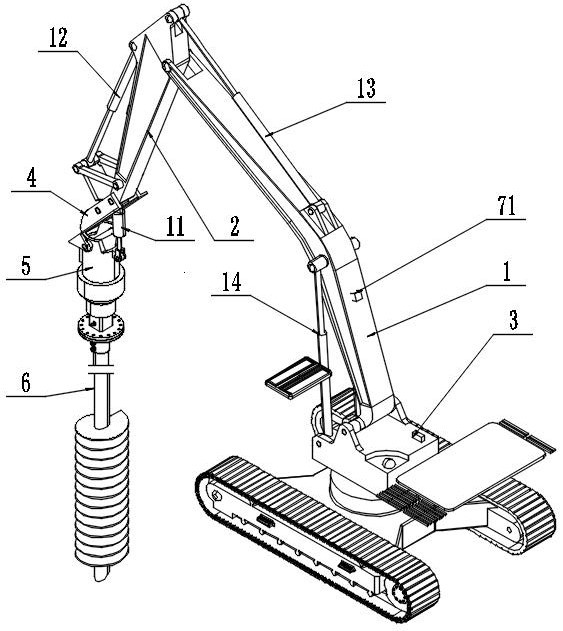
3、一种用于钢结构架体的基础施工螺旋锚杆钻机,包括掘机主体、挖掘机一级臂和挖掘机二级臂,挖掘机一级臂与挖掘机主体铰接连接连接,挖掘机二级臂与挖掘机一级臂铰接连接,挖掘机二级臂的末端通过连接件连接驱动装置,驱动装置安装有螺旋锚钻杆,还包括角度控制机构,角度控制机构包括第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆;
4、所述连接件上沿其长度方向依次间隔设有四个铰接点,分别为第一铰接点、第二铰接点、第三铰接点和第四铰接点;
5、所述驱动装置上设有第一连接点和第二连接点,第一连接点位于驱动装置的上端,第二连接点位于驱动装置的侧部;
6、所述连接件通过第一铰接点与挖掘机二级臂铰接连接;
7、所述驱动装置的第一连接点与连接件的第四铰接点铰接连接;
8、所述第一伸缩杆一端与连接件的第二铰接点铰接连接,第一伸缩杆的另一端与驱动装置的第二连接点铰接连接;第一伸缩杆用于控制驱动装置及螺旋锚钻杆相对于连接件的角度;
9、所述第二伸缩杆一端与挖掘机二级臂铰接连接,第二伸缩杆的另一端与连接件的第三铰接点铰接连接;第二伸缩杆用于控制连接件相对于挖掘机二级臂的角度;
10、所述挖掘机二级臂与挖掘机一级臂铰接两者之间设有第三伸缩杆,第三伸缩杆用于控制挖掘机二级臂相对于挖掘机一级臂的角度;
11、所述挖掘机一级臂与挖掘机主体两者之间设有第四伸缩杆,第四伸缩杆用于控制挖掘机一级臂相对于挖掘机主体的角度。
12、进一步的,所述驱动装置的上端侧部固定设有连接耳板,连接耳板上设有第二连接点。
13、进一步的,所述驱动装置为液压马达,液压马达的输出端朝下,螺旋锚钻杆同轴安装在液压马达的输出端。
14、进一步的,所述第二伸缩杆的另一端与连接件的第三铰接点铰接连接的设置方式如下:
15、还包括第一连杆和第二连杆,第一连杆的一端与连接件的第三铰接点铰接连接,第二连接杆的一端与挖掘机二级臂铰接连接,第一连杆的另一端和第二连杆的另一端铰接连接形成第五铰接点,第二伸缩杆的另一端与第五铰接点铰接连接。
16、进一步的,所述第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆为液压缸或电动推杆。
17、进一步的,所述挖掘机一级臂上设有角度传感器甲,挖掘机二级臂上设有角度传感器乙,连接件上设有角度传感器丙,驱动装置上安装有角度传感器丁。
18、本发明的有益效果:
19、(1)本发明解决了现有技术中螺旋锚钻杆钻进时存在入地角度不可控,或者需要其他人员或者工具协助的问题,实现了挖掘机自主能够控制锚杆钻头的入地角度,在钻进过程中能够随动跟随调整,始终保证螺旋锚钻杆的入地角度处于设计角度,,挖掘机臂部始终在轴向给予锚杆钻头以钻进压力,控制其避免产生横向推力,实现整个钻进方向的动态,精确控制,保证锚杆钻头的入地角度的施工效果。
20、(2)本发明在连接件和驱动装置之间增加了第一伸缩杆,第一伸缩杆能控制驱动装置相对于连接件的相对角度,由于该连接件属于挖掘机臂部的一部分了,这样就能随着臂部各个节段的角度控制的叠加(挖掘机一级臂和挖掘机二级臂以及连接间的角度控制通过第二伸缩杆、第三伸缩杆和第四伸缩杆实现)来实现驱动装置的相对角度控制,从而实现对其下端连接的钻杆入地角度的控制,并且能够随着钻杆的入地深度的变化,不断的随动调整(随着钻杆的不断深入,连接件与钻杆的相对角度不断变化,这样角度控制机构的伸缩杆长度就要随着不断变化,这样才能保证钻杆相对地面的角度是处于稳定状态的,从而实现对钻进角度的准确控制),始终保该钻杆的钻进角度不变,保证锚杆的入地角度的稳定控制,避免出现角度的偏差造成锚杆的锚固效果的偏差。
21、(3)本发明角度控制机构由第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆组成,并且配合设有角度传感器甲、角度传感器乙、角度传感器丙和角度传感器丁,角度传感器丁实时检测驱动装置的轴线相对水平面的角度,也就代表了螺旋锚的入地角度,根据实时检测的入地角度与设计角度的偏差,并结合角度传感器甲、乙、丙反馈的钻进操作过程中的挖掘机一级臂和挖掘机二级臂以及连接间的角度变化,使该挖掘机钻机的操作人员,实时调整第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆的伸缩控制动作,来动态的适配该入地角度的要求,这样就能够实现对驱动装置的轴向方向的准确控制和纠偏。
技术特征:
1.一种用于钢结构架体的基础施工螺旋锚杆钻机,包括掘机主体、挖掘机一级臂和挖掘机二级臂,挖掘机一级臂与挖掘机主体铰接连接连接,挖掘机二级臂与挖掘机一级臂铰接连接,挖掘机二级臂的末端通过连接件连接驱动装置,驱动装置安装有螺旋锚钻杆,其特征在于:还包括角度控制机构,角度控制机构包括第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆;
2.根据权利要求1所述的用于钢结构架体的基础施工螺旋锚杆钻机,其特征在于:所述驱动装置的上端侧部固定设有连接耳板,连接耳板上设有第二连接点。
3.根据权利要求2所述的用于钢结构架体的基础施工螺旋锚杆钻机,其特征在于:所述驱动装置为液压马达,液压马达的输出端朝下,螺旋锚钻杆同轴安装在液压马达的输出端。
4.根据权利要求1所述的用于钢结构架体的基础施工螺旋锚杆钻机,其特征在于:所述第二伸缩杆的另一端与连接件的第三铰接点铰接连接的设置方式如下:
5.根据权利要求1所述的用于钢结构架体的基础施工螺旋锚杆钻机,其特征在于:所述第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆为液压缸或电动推杆。
6.根据权利要求1所述的用于钢结构架体的基础施工螺旋锚杆钻机,其特征在于:所述挖掘机一级臂上设有角度传感器甲,挖掘机二级臂上设有角度传感器乙,连接件上设有角度传感器丙,驱动装置上安装有角度传感器丁。
技术总结
本发明公开了一种用于钢结构架体的基础施工螺旋锚杆钻机,包括掘机主体、挖掘机一级臂和挖掘机二级臂,挖掘机二级臂的末端通过连接件连接驱动装置,驱动装置安装有螺旋锚钻杆,还包括角度控制机构,角度控制机构包括第一伸缩杆、第二伸缩杆、第三伸缩杆和第四伸缩杆;第一伸缩杆一端与连接件的第二铰接点铰接连接,第一伸缩杆的另一端与驱动装置的第二连接点铰接连接。本发明实现了挖掘机自主能够控制锚杆钻头的入地角度,在钻进过程中能够随动跟随调整,始终保证螺旋锚钻杆的入地角度不变,挖掘机臂部始终在轴向给予锚杆钻头以钻进压力,控制其避免产生横向推力,实现整个钻进方向的动态,精确控制,保证锚杆钻头的入地角度的施工效果。
技术研发人员:文宗山,高晓莉,景国明,蔡伟,马守锋,陈征,张石磊,蔡涌
受保护的技术使用者:河南送变电建设有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!