旋挖钻机自动对孔控制方法、装置、处理器及计算机可读存储介质与流程
本发明涉及基础施工,特别是涉及一种旋挖钻机自动对孔控制方法、装置、处理器及计算机可读存储介质。
背景技术:
1、旋挖钻机是一种适合建筑基础工程中成孔作业的施工机械,主要适于砂土、粘性土、粉质土等土层施工,在灌注桩、连续墙、基础加固等多种地基基础施工中得到广泛应用。
2、旋挖钻机正常钻孔过程不需要动变幅机构和行走机构,只需要动用回转机构进行甩土工作,靠记录回转角度即可完成重新对孔。然而,在某些突发情况下,必须暂停钻孔工作,动用变幅或行走机构时,之后的重新对孔工作时通常依靠人为指挥操作人员进行调整,初步对准钻孔,然后操作人员试放主卷扬,放钻头到钻孔内,感受钻头下放时与孔壁的阻力情况,阻力较大的话进行小幅调整,直至阻力调整至操作人员预期值,完成最终对孔,重新开始钻孔工作。然而,这种对孔方式对操作人员技能能力要求高,非常依靠机旁人员的指挥能力和操作人员的操作能力,全凭人员感觉完成重新对孔,调整次数较多,花费时间较长,效率较低。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种旋挖钻机自动对孔控制方法、装置、处理器及计算机可读存储介质,能够实现自动对孔,无需反复调整,以提高对孔效率。
2、为达到上述目的,本发明提供一种旋挖钻机自动对孔控制方法,用于控制旋挖钻机对孔,所述旋挖钻机上设有相对旋挖钻机的桅杆固定设置的第一感应元件和第二感应元件,所述方法包括:
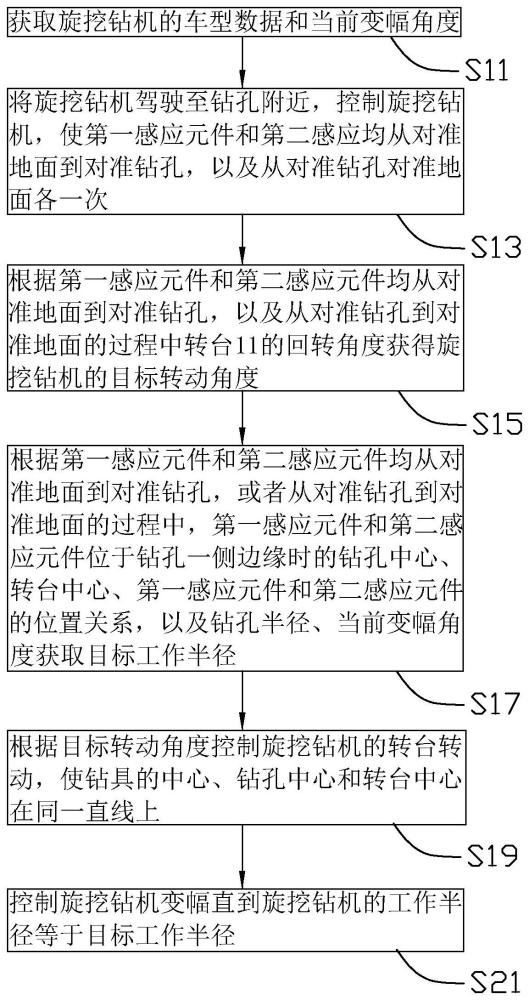
3、获取旋挖钻机的车型数据和当前变幅角度;
4、将旋挖钻机驾驶至钻孔附近,控制旋挖钻机的转台转动,使所述第一感应元件和所述第二感应元件均从对准地面到对准钻孔,以及从对准钻孔到对准地面至少各一次;
5、根据所述第一感应元件和/或所述第二感应元件均从对准地面到对准钻孔,以及从对准钻孔到对准地面的过程中所述转台的回转角度获得旋挖钻机的目标转动角度;
6、根据所述第一感应元件和所述第二感应元件从对准地面到对准钻孔,或者从对准钻孔到对准地面的过程中,所述第一感应元件和所述第二感应元件位于钻孔一侧边缘时的钻孔中心、转台中心、第一感应元件和第二感应元件的位置关系,以及钻孔半径、当前变幅角度获取目标工作半径;
7、根据所述目标转动角度控制所述转台转动,使钻具的中心、所述钻孔中心和转台中心在同一直线上;
8、控制旋挖钻机变幅直到旋挖钻机的工作半径等于目标工作半径。
9、可选地,所述获取工程机械的车身倾角极限值的步骤具体包括:
10、获取支腿全支撑,支撑支腿的地面未发生塌陷,且臂架处于初始状态时的第一初始车身倾角;
11、获取支腿全支撑,支撑支腿的地面未发生塌陷,且臂架倾翻力矩最大时的工程机械的车身倾角值作为最大车身倾角;
12、计算所述第一初始车身倾角与所述最大车身倾角的差值,并将所述第一初始车身倾角与所述最大车身倾角的差值作为所述车身倾角极限值。
13、可选地,所述将旋挖钻机驾驶至钻孔附近,控制旋挖钻机的转台转动,使所述第一感应元件和所述第二感应元件均从对准地面到对准钻孔,以及从对准钻孔到对准地面至少各一次的步骤具体包括:
14、将旋挖钻机驾驶至钻孔附近,并旋转所述转台使钻具位于钻孔的第一侧,且使所述第一感应元件和所述第二感应元件对准地面;
15、控制所述转台朝钻孔的第二侧转动,使所述第一感应元件和所述第二感应元件均从对准地面到对准钻孔,以及从对准钻孔到对准地面至少各一次。
16、可选地,所述获得目标转动角度的步骤具体包括:
17、获取所述第一感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度,以及所述第二感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度;
18、根据所述第一感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度获得第一回转角度差,根据所述第二感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度获得第二回转角度差;
19、根据所述第一回转角度差和所述第二回转角度差计算所述目标转动角度;
20、或者,所述获得目标转动角度的步骤具体包括:
21、获取所述第一感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度;
22、根据所述第一感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度获得第一回转角度差;
23、根据所述第一回转角度差计算所述目标转动角度;
24、或者,所述获得目标转动角度的步骤具体包括:
25、获取所述第二感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度;
26、根据所述第二感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度获得第二回转角度差;
27、根据所述第二回转角度差计算所述目标转动角度。
28、可选地,根据a=((a1+(a3)/2)+(a4+(a6)/2))/2计算得到所述目标转动角度,a为所述目标转动角度,a1为所述第一感应元件位于钻孔第一侧边缘的回转角度,a2为所述第一感应元件位于钻孔的第二侧边缘时的回转角度,a3为a1和a2之差,a4为所述第二感应元件位于钻孔第一侧边缘的回转角度,a5为位于所述第二感应元件位于钻孔第二侧边缘时的回转角度,a6为a4和a5之差;或者,根据a=a1+(a3)/2计算得到所述目标转动角度,a为所述目标转动角度,a1为所述第一感应元件位于钻孔第一侧边缘的回转角度,a2为所述第一感应元件位于钻孔的第二侧边缘时的回转角度,a3为a1和a2之差;根据a=a4+(a6)/2计算得到所述目标转动角度,a为所述目标转动角度,a4为所述第二感应元件位于钻孔第一侧边缘的回转角度,a5为位于所述第二感应元件位于钻孔第二侧边缘时的回转角度,a6为a4和a5之差。
29、可选地,所述获取目标工作半径的步骤具体包括:
30、获取所述第一感应元件位于钻孔第一侧边缘或第二侧边缘时,所述第一感应元件与钻孔中心的连线恰好垂直于钻孔中心与转台中心连线的情况下,所述第一感应元件位于钻孔第一侧边缘或第二侧边缘时与钻孔中心、转台中心连线的夹角;
31、获取所述第一感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度之差第一回转角度差,并获取所述第二感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度之差第二回转角度差,并判断所述第一回转角度差的一半与所述第二回转角度差的一半、第二回转角度差的一半与所述夹角的大小关系;
32、在所述第一回转角度差的一半与所述第二回转角度差的一半、所述第二回转角度差的一半与所述夹角的大小关系的不同情况下,根据钻孔半径、所述第一感应元件位于钻孔第一侧边缘或第二侧边缘时到转台中心的距离m和所述第一回转角度差的一半获得所述目标工作半径,或者根据钻孔半径、所述第二感应元件位于钻孔第一侧边缘或第二侧边缘时到转台中心的距离n和所述第二回转角度差的一半获得所述目标工作半径。
33、可选地,获得所述目标工作半径具体为:
34、当所述第一回转角度差的一半大于等于所述夹角时,根据公式计算所述目标工作半径;
35、当所述第一回转角度差的一半小于等于所述夹角,且所述第一回转角度差的一半小于等于所述第二回转角度差的一半时,根据公式计算所述目标工作半径;
36、当所述第一回转角度差的一半小于等于所述夹角,且所述第一回转角度差的一半大于所述第二回转角度差的一半时,根据公式计算所述目标工作半径;
37、其中,在所述第一感应元件与钻孔中心的连线恰好垂直于钻孔中心与转台中心连线的情况下,γ为所述第一感应元件位于钻孔第一侧边缘或第二侧边缘时与钻孔中心、转台中心连线的夹角;r为钻孔半径,m为所述第一感应元件位于钻孔第一侧边缘或第二侧边缘时到转台中心的距离,n为所述第二感应元件位于钻孔第一侧边缘或第二侧边缘时到转台中心的距离,(a3)/2为所述第一感应元件位于钻孔第一侧边缘的回转角度和位于所述第二侧边缘时的回转角度之差所述第一回转角度差的一半;(a6)/2为所述第二感应元件位于钻孔第一侧边缘的回转角度和位于第二侧边缘时的回转角度之差所述第二回转角度差的一半。
38、可选地,所述控制旋挖钻机变幅直到旋挖钻机的工作半径等于目标工作半径的步骤具体包括;
39、根据所述目标工作半径获得目标变幅角度;
40、控制变幅油缸伸缩,使旋挖钻机变幅至所述目标变幅角度。
41、本技术还提供一种处理器,被配置成执行上述旋挖钻机自动对孔控制方法。
42、本技术还提供一种钻机自动对孔控制装置,包括:
43、第一感应元件,相对旋挖钻机的桅杆固定设置;
44、第二感应元件,相对旋挖钻机的所述桅杆固定设置;
45、回转角度检测元件,用于检测转台的回转角度;
46、变幅角度检测元件,用于检测旋挖钻机的变幅角度;以及
47、上述处理器。
48、本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上任一所述的方法的步骤。
49、本技术的旋挖钻机自动对孔控制方法、装置、处理器及计算机可读存储介质中,在旋挖钻机动用了变幅机构和行走机构以后,能够实现自动对孔,对工作人员技能要求较低,无需多次调整,工作效率较高。
- 还没有人留言评论。精彩留言会获得点赞!