考虑成型序列影响的盾构管片上浮预测方法与流程
本发明涉及盾构管片上浮预测方法,属于隧道建设数据分析和新一代信息。
背景技术:
1、盾构隧道由盾构管片在螺栓的铰接下装配成型,盾构管片定位越准确,盾构隧道成型质量越高。受地层岩土力学性质、地下水、掘进参数、浆液填充质量等因素影响,在管片螺栓固定后盾构管片实际安装位置相对设计安装位置发生随时间变化的位移,其中竖直方向上的偏差为上浮或沉降。管片上浮、沉降在相邻管片间形成错台,导致管片间受力不均匀,易导致管片局部压坏,不利于盾构隧道长期服役。
2、(一种基于管片上浮的盾构姿态调整方法及系统,申请(专利)号:cn202211366080.3,申请日:2022.10.31)根据以盾构机推力、管片位置土压、管片位置水压、壁后注浆压力、管片轴线与设计位置初始位置偏差预测稳定偏差的函数模型的输出与偏差阈值之间的二元判定,作为选择姿态调整措施的依据,但未涉及稳定偏差函数预测的求解方法和具体形式。
3、(一种基于神经网络的盾构隧道管片上浮预测方法,申请(专利)号:cn202111558867.5,申请日:2021.12.20)输入11个影响上浮的因素后,输出预测的管片上浮量,并使用真实测量的管片上浮量对bp神经网络进行优化。
4、(一种上软下硬地层双模盾构隧道管片上浮量新型估算方法,申请(专利)号:cn202110549976.4,申请日:2021.05.20)采用有限元软件建立地层-结构模型,以上下地层弹性模量的比值为变量进行分析,从而得到上浮量与上下地层弹性模量比值的关系;采用有限元软件建立荷载-结构模型,得到管片结构上浮量与浆液压力比值之间的拟合关系。
5、(一种脱出盾尾的管片环上浮、错台精细化模型的建立方法,申请(专利)号:cn202010015761.x,申请日:2020.01.07)和(一种盾构隧道管片错台变形获取方法,申请(专利)号:cn201910570323.7,申请日:2019.06.27)根据结构特征、管片环受到浮力随时间变化规律分析管片环接头剪切刚度,采用壳模拟管片、弹簧模拟管片环接缝,建立盾尾的管片环上浮量、张开量、错台以及上浮引起的附加内力计算模型。
6、现有的管片上浮预测方法,并未考虑既有成型管片环对单环切口施工-拼装阶段盾构机与该环的相对位置关系变化的影响,以及由此产生的当前施工环偏差的累积效果,即既有技术并未考虑隧道管片成型序列对当前成型管片上浮的影响,既有技术中的预测模型可解释性较弱、无法显式表达。
技术实现思路
1、为解决上述问题,本发明提出了考虑成型序列影响的盾构管片上浮预测方法,包括如下步骤:
2、步骤一、构建盾构管片成型监测变量时空样本
3、对涉及盾构管片成型监测的位置变量进行系统定义,分段统计掘进速率大于零的时刻的盾构掘进参数,采集盾尾间距,得到折线形式的成型管片环竖直方向位置偏差时程曲线方程、各掘进参数时程曲线、盾尾顶部间距时程曲线、盾尾底部间距时程曲线,完成盾构管片成型监测变量时空样本构建。
4、步骤二、提取位移及动作特征
5、位移及动作特征包含管片成型序列竖向位移特征、盾构刀盘切口动作特征、中盾及盾尾动作特征,计算管片成型序列竖向位移样本、盾构刀盘切口动作样本、中盾及盾尾动作样本的统计量,基于统计量构造非线性加权函数,对非线性加权函数进行非线性映射,完成对管片成型序列竖向位移特征的提取,通过对统计量进行非线性映射,完成对盾构刀盘切口动作特征的提取,基于统计量构造分式特征指标,对分式特征指标加权后进行非线性映射,实现对中盾及盾尾动作特征的提取。
6、步骤三、构造管片上浮预测模型
7、管片上浮预测模型是当前拼装环拼装完成时的上浮量预测模型,当前拼装环拼装完成时的上浮由既往成型环对当前拼装环影响、当前拼装环盾构切口动作影响和当前拼装环中盾及盾尾动作影响共同作用形成,当前拼装环拼装完成时的上浮预测模型是根据管片成型序列竖向位移特征、盾构刀盘切口动作特征、中盾及盾尾动作特征预测当前拼装环拼装完成时的上浮量的非线性映射。
8、步骤四、训练管片上浮预测模型。
9、进一步地,在步骤一中,对所述位置变量进行系统定义,具体包括:
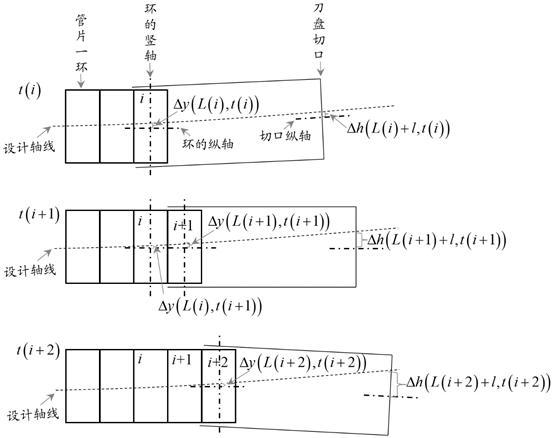
10、第i环纵断面上该环的竖轴和该环的纵轴之间交点在隧道中的里程为l(i)。第i环拼装完成时刻为t(i)。
11、定义刀盘切口轮廓与切口纵轴交点为切口点,第i环的竖轴和第i环的纵轴之间交点为第i环位置点。
12、t(i)时刻切口点在隧道中的里程为l(i)+l,l为t(i)时刻切口点与第i环位置点之间的距离。
13、竖直方向上,t(i)时刻第i环位置点实际位置与隧道设计轴线之间的距离为δy(l(i),t(i)),t(i+1)时刻第i环位置点实际位置与隧道设计轴线之间的距离为δy(l(i),t(i+1)),t(i)时刻第i环切口点实际位置与隧道设计轴线之间的距离为δh(l(i)+l,t(i))。
14、在三维直角坐标系0-tlδy中,对于第i环,将相同l(i)下不同时刻第i环位置点实际位置与隧道设计轴线之间的距离实测点按时间顺序以线段逐个顺次相连,得到折线形式的成型管片环竖直方向位置偏差时程曲线方程f(i)=δy(l(i),t)。
15、进一步地,在步骤三中,所述管片上浮预测模型为式(25),管片上浮预测模型的第i环训练集的输入、标注分别为{ca(i),chead(i),c(i)}、δy(l(i),t(i)),i∈[1,im],im为单个隧道总环数,为对标注的预测值,系数组合为{waem,wae,waem,waσm,waσ,waσm,ba,wn,wp,wt,wv,wf,wqι,wqβ,wgι,wgβ,wrι,wrβ},
16、
17、其中:
18、第i环的管片成型序列竖向位移特征ca(i)按式(4)计算,waem、wae、waem、waσm、waσ、waσm、ba分别为eδy(i)低阶权重、eδy(i)权重、eδy(i)高阶权重、σδy(i)低阶权重、σδy(i)权重、σδy(i)高阶权重、第一调节系数,
19、
20、盾构刀盘切口动作特征chead(i)按式(15)计算,wn、wp、wt、wv、wf分别为刀盘转速权重、土仓压力权重、刀盘扭矩权重、掘进速率权重、总推力权重,
21、
22、盾构机刀盘转速特征cn(i)、土仓压力特征cp(i)、刀盘扭矩特征ct(i)、掘进速率特征cv(i)、总推力特征cf(i)。
23、中盾及盾尾动作特征c(i)按式(24)计算,wqι、wqβ、wgι、wgβ、wrι、wrβ分别为第一权重、第二权重、第三权重、第四权重、第五权重、第六权重,
24、
25、竖直方向顶部推进油缸行程差特征cqι(i)、竖直方向底部推进油缸行程差特征cqβ(i)、竖直方向顶部铰接油缸行程差特征cgι(i)、竖直方向底部铰接油缸行程差特征cgβ(i)、第i环拼装完成时,盾尾顶部的盾尾内表面与管片之间最短间距特征crι(i)为ln(rιop(i)),盾尾底部的盾尾内表面与管片之间最短间距特征crβ(i)为ln(rβιm(i))。
26、进一步地,所述eδy(i)和所述σδy(i)分别为:
27、第i环的管片序列上浮量eδy(i)、管片序列上浮波动量σδy(i)分别按式(2)、式(3)计算,
28、
29、
30、进一步地,所述公式(4)和公式(24)中的ξ,定义如下:
31、按式(1)定义非线性映射模型z=ξ(x),z为自变量x在映射ξ下的像,
32、
33、进一步地,在步骤四具体包括:训练管片上浮预测模型,就是根据预测值和标注之间的差异,寻找使预测值和标注之间的差异最小的模型权重系数组合,在自适应步长迭代计算条件下采用循环试算的方式逼近预测值和标注之间的差异最小的全局最优解,自适应步长迭代计算条件下的循环试算方法,包含单个运算核心执行的单个计算任务、计算循环、寻优循环、差值运算循环四个层级,单个运算核心执行的单个计算任务,采用不少于4个运算核心并行执行不同的计算任务,对式(25)中系数组合内的各系数均执行500次系数变化的损失计算从而完成单个计算循环,通过执行寻优循环实现计算循环、初始值更新的循环运算,通过执行差值运算循环实现对差值倍数的寻优,从而实现对式(25)中系数组合内的各系数的全局最优逼近。
34、有益效果
35、(1)将受地层岩土力学性质、地下水、浆液填充质量影响的既往成型管片环上浮变形时空演化信息计入当前拼装环管片上浮影响因素,实现在当前环上浮预测中计入成型序列影响,模型变量设置更加符合实际工程中物理量之间的相互影响关系。
36、(2)基于关键指标统计量融合的特征提取,实现了管片上浮预测模型的显式表达,结合适用于全局寻优的自适应步长并行迭代求解方法,时本技术具有特征提取物理意义明确、运算过程可解释性强、模型显式、模型参数求解能够避免局部最优的优点。
- 还没有人留言评论。精彩留言会获得点赞!