一种基于改进YOLOv5s的煤岩界线识别装置及使用方法
本发明涉及煤矿安全生产,尤其涉及一种基于改进yolov5s的煤岩界线识别装置及使用方法。
背景技术:
1、智能化和无人化开采是煤矿井下生产的必然趋势,也是我国煤矿企业当前重要的发展方向,智能化、无人化开采的关键在于提高工作面机电装备的智能化水平,而最大的共性难题就是煤岩界线的自动识别,不论是采煤机滚筒的高度自动调节,还是液压支架顶部支护自动调整,均依赖于对煤层和岩层空间位置的精准定位,可见,深入研究煤岩界线自动识别技术对煤矿井下智能化、无人化开采具有重要的理论意义和应用价值。
2、煤岩识别技术是采煤机滚筒自动调高的技术基础,也是综合机械化采煤无人工作面的核心技术之一,目前,国内采煤机滚筒的调节大多依赖人工调节及采煤机记忆截割,人工调节通过人的听觉和视觉判断采煤机滚筒是否截割到岩石,该方法易受环境及人为因素影响,记忆截割根据记忆信息自动调节采煤机滚筒高度,但也需要人为干预,采煤机在截割煤层过程中,若欠截割会造成采煤不全、资源浪费:若过截割,会使煤炭质量下降,损害截齿、引发火花,进而造成瓦斯爆炸,因此,为采煤机自动调高提供依据的煤岩识别技术,是提高采煤的回采率、降低截割岩石对采煤机损害的重要保证。
技术实现思路
1、为解决现有技术的不足之处,本发明提供了一种基于改进yolov5s的煤岩界线识别装置及使用方法,以解决人眼识别精度不足、效率低下的问题。
2、一种基于改进yolov5s的煤岩界线识别装置,包括负压诱导除尘机构、煤岩界线数据采集机构、煤岩界线数据处理机构、智能控制器以及采煤机,所述负压诱导除尘机构用于清除煤尘,为煤岩界线数据采集机构创造工作环境;所述煤岩界线数据采集机构用于捕捉煤岩界线图像并传输给煤岩界线数据处理机构;煤岩界线数据处理机构用于分析采集到的图像,并确定截割路径;智能控制器根据煤岩界线数据处理机构的分析结果控制采煤机的操作,这些机构共同工作,确保了采煤过程的高效和安全。
3、进一步的,所述负压诱导除尘机构通过固定螺栓安装在采煤机的一侧,所述负压诱导除尘机构包括防爆外壳、除尘刷、电机、控制板、亚克力面板、负压诱导式喷雾嘴。所述防爆外壳通过紧定螺钉固定在采煤机上,煤岩界线数据采集机构和智能控制器均安装于防爆外壳内部,亚克力面板固定于防爆外壳的一侧用于密封防护,所述除尘刷和负压诱导式喷雾嘴均安装在亚克力面板的外部,负压诱导除尘机构会对采煤机开采过程进行除尘和抑尘处理,确保煤岩界线数据采集机构可以采集到较为清晰的照片。其中,防爆外壳使用紧定螺钉固定在采煤机上,煤岩界线数据采集机构和智能控制器机构固定在防爆外壳的内部,煤岩界线数据处理机构布置在远程控制室中。防爆外壳开口朝向采煤机摇臂,开口处使用高透光、耐高温、抗冲击的亚克力面板密封防护。除尘刷和诱导式喷雾嘴设置在亚克力面板外部。
4、进一步的,除尘刷通过连杆与电机连接,紧贴亚克力面板外表面,连杆处做防水处理;电机和控制板固定在亚克力面板的底部,电机控制线与控制板连接,通过控制指令,控制板可以控制电机的工作时间和转动角度。所述控制板可以按照设定的定时机构,固定时间自动清洗一次亚克力面板上的煤尘煤粉。定时清洗可以采用数字电路的芯片进行设定。控制板上设有rs485信号输出,可以实现远程控制。视觉传感器采集到亚克力面板上面的煤尘煤粉达到设定的参数时,控制板启动电机工作,驱动电机控制除尘刷沿面板来回摆动进行清洁。视觉传感器为优选设备,也可以不设置该部件。设置了该部件增加了煤尘煤粉浓度较大的情况下的自动启动清洗的功能。负压诱导式喷雾嘴有两个,使用螺栓固定在亚克力面板外部的顶端,每个喷雾嘴连接有雾化管路。雾化管路与电动吸气泵连接,电动吸气泵放置在采煤机水箱内。喷雾嘴安装有光电式粉尘传感器,当传感器感应到煤粉浓度超过指定阈值,就会控制电动吸水泵从水箱内吸水雾化后喷出高速汽雾射流,在防爆外壳周围形成一个负压区,并产生较大的雾团,抑制采集图像过程中出现在画面内的大量煤尘煤粉。
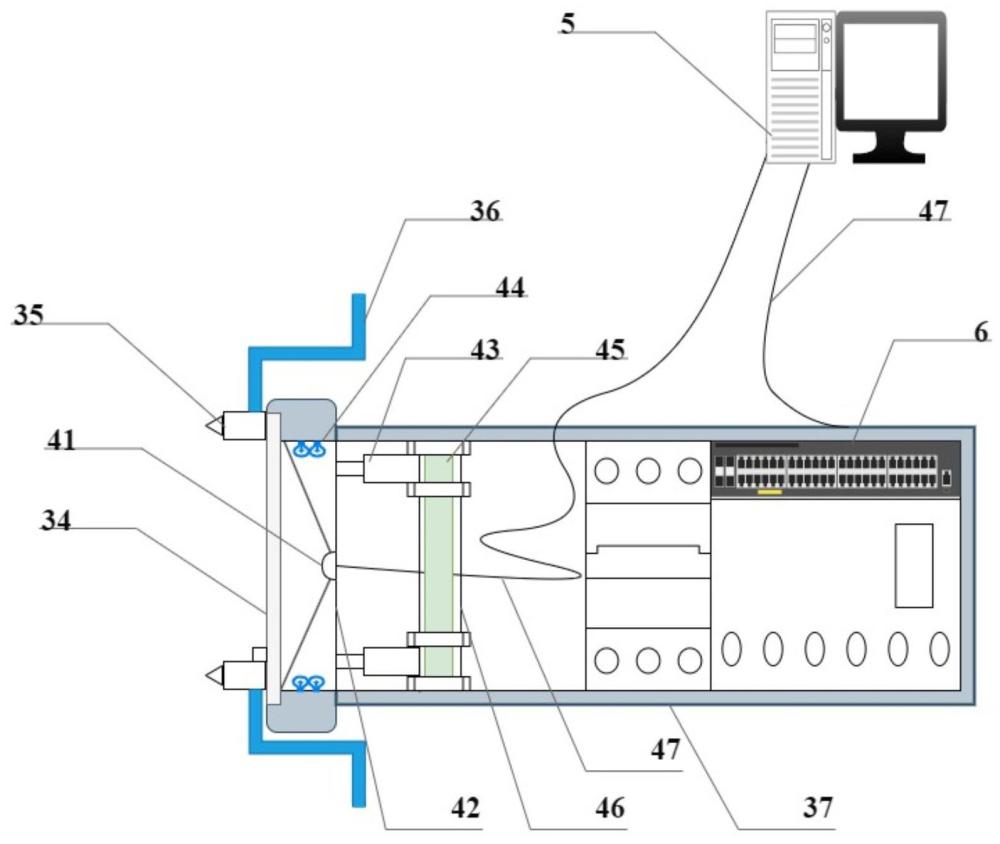
5、进一步的,所述煤岩界线数据采集机构固定安装于采煤机上部,所述煤岩界线数据采集机构包括双目工业相机、光源、安装板、液压调节支座、橡胶隔振垫、数据传输缆线、基座,所述双目工业相机通过螺栓固定于光源中心位置的安装板上,所述安装板与液压调节支座前端的连接板通过紧固螺栓连接,液压调节支座与基座通过螺栓固定连接,所述橡胶隔振垫安装在压调节支座与基座之间,用于减小振动幅值,所述双目工业相机一侧设有接线口用于数据传输,所述数据传输缆线将接线口与煤岩界线数据处理装置相连接,所述信息传输串口支持多协议传输,数据传输缆线默认外设组件互连扩展总线通信协议(pciexpress),所述光源包括多个可调光led灯,所述可调光led灯围绕安装在双目工业相机的周围。
6、进一步的,所述煤岩界线数据处理机构内设有上位机,所述上位机包括键盘、屏幕显示器、鼠标和工控机,该上位机通过数据传输缆线与煤岩界线数据采集机构连接,所述采煤机的两侧均设有滚筒,当滚筒运动到双目工业相机视觉范围内时,该双目工业相机将开始进行信息采集,并通过数据传输缆线将采集到的画面传送到上位机中。
7、进一步的,所述智能控制器包括主处理器与外围器件单元、反馈与执行单元以及通信单元,所述智能控制器设于防爆外壳内部并位于煤岩界线数据采集机构的后侧,主处理器与外围器件单元、反馈与执行单元、通信单元集成在一个控制机箱里面,所述控制机箱通过紧定螺钉固定在防爆外壳上,当智能控制器在接收到上位机发送的控制指令后,各个单元相互配合实现最优的控制策略,完成对采煤机滚筒的自动调高。
8、进一步的,所述上位机包括有目标检测算法,该检测算法基于改进的yolov5s模型进行检测,所述改进的yolov5s(you only look once)模型检测的具体步骤包括:首先对采集到的图像进行预处理包括图像增强和图像滤波;然后在原yolov5s模型的基础上,对检测模型的主干网络以及特征融合部分进行改进,包括在主干网络最后一个c3ghost(c3模块基础上增加ghostbottleneck操作)模块之后添加cbam注意力机制(convolutional blockattention module),同时引入幻影卷积(ghostconv)模块来替换原卷积(conv)模块,上位机结合煤层和岩层的位置信息以及类别信息,处理得到煤岩界线的基本轮廓曲线,之后使用最小二乘法进行曲线拟合,得到一条完整的采煤机截割路径;最后通过数据传输缆线将数据传输到智能控制器。
9、一种基于改进yolov5s的煤岩界线识别装置的使用方法,包括以下步骤:
10、s1:采煤机滚筒在截割煤层的过程中,负压诱导除尘机构进行清洁处理;
11、s2:双目工业相机采集视觉范围内的煤岩界线信息,并通过数据传输缆线将数据实时传输到煤岩界线数据处理机构中;
12、s3:煤岩界线数据处理机构调用部署在上位机中的改进yolov5s模型实时检测,得到煤层和岩层的类别信息和位置信息;
13、s4:煤岩界线数据处理机构结合煤层和岩层的位置信息以及类别信息,计算出采煤机截割路径后给智能控制器发送控制指令;
14、s5:智能控制器接收控制指令后,结合煤岩界线数据处理机构给出的最佳截割路径,完成对采煤机滚筒的自动调高。
15、本发明的有益效果:
16、本发明,通过负压诱导除尘机构来压缩空气和水作动力,混合后产生高速汽雾射流,形成流速差,再通过特制的诱导式喷雾嘴喷出,在喷雾出口处直径1m的范围内形成负压区,将带尘的空气吸到雾柱内,小雾粒将雾柱内的煤尘集中捕捉湿润,使其降落,达到抑尘除尘目的。
17、本发明,煤岩界线数据采集机构在采集信息的过程中,双工业摄像头识别可以保证在不同生产工况下均可以有效识别刚截割过的煤层断面,液压调节支座可以自适应调整摄像头角度和位置来满足图像采集要求,橡胶隔振垫具有较大的形变范围和较低的刚度,能够在振动发生时有效地吸收和隔离振动能量,减轻振动对双目工业相机的冲击,从而起到很好的隔振效果。
18、本发明,煤岩界线数据处理机构经过图像增强、图像滤波和改进yolov5s检测模型,提高了模型的检测速度和检测精度,可以得到煤岩界线的基本轮廓曲线,之后使用最小二乘法进行曲线拟合,得到一条完整的采煤机截割路径,通过数据传输缆线高效传输数据给到智能控制器。
19、本发明,通过智能控制器各个单元相互配合,在截割滚筒距离煤层较远时,采用较强的比例控制,加速靠近煤层;在距离较近时,采用pid控制,降低速率,减弱控制作用;距离很近时采取保持控制策略,随着采煤机滚筒与煤层距离的变化,不断地变换控制策略,以控制采煤机滚筒实现最佳的截割路径。
- 还没有人留言评论。精彩留言会获得点赞!