液压驱动装置的制作方法
1.本发明涉及一种将从空气压源被供给的空气压转换为液压、并驱动液压致动器的液压驱动装置。
背景技术:
2.利用自来水的水压驱动与液压驱动相比较,作为优点,列举出工作液的获取和废弃容易这点、没有火灾以及污染的危险性这点、卫生方面优异这点、以及能够洗涤这点。水压驱动设备在食品加工、室外作业等中被利用。
3.作为水压驱动的危险性,列举出1)锈的产生、2)水的劣化、3)由低粘性产生的泄漏增加、润滑不足、以及4)空腔的产生等。1)能够通过不锈钢等材料来避免,若2)更换水,则没问题。但是,3)和4)在高压下特别显著。例如,在水压泵的泵内部,金属彼此高压且高速地接触,因此,存在因润滑不足而引起的烧焦的危险性,需要结构上进行创新。这对于将泵和缸直接连结的eha(电静液压致动器)也是相同的。另外,虽然伺服阀对于液压机器人而言是优选的,但是在将其置换为水压的情况下,需要同样的创新。因此,现在,市场销售的水压泵和水压伺服阀的成本极高,处于难以认为普及了的状况。
4.另外,本技术发明人提出了日本专利特开jp2015-96757a以及日本专利特开jp2015-178885a所公开的液压驱动装置。在上述液压驱动装置中,从将来自空气压源的空气压转换为液压的气液转换器、或者将来自空气压源的空气压力转换为增压后的液压的气液增压器起始的压力液体被供给至液压致动器的第一压力室,因此,液压致动器的杆向下方移动。通过从该状态起,空气从空气压源被供给至液压致动器的第二压力室,从而使液压致动器的杆向上方移动。
5.在日本实用新型专利jps62-167908u中,记载了对两个切换阀进行切换操作,并使第一空液转换器、第二空液转换器、以及增压式空液转换器进行工作。
技术实现要素:
6.日本专利特开jp2015-96757a以及日本专利特开jp2015-178885a所公开的液压驱动装置的液压驱动方式为单侧驱动。即,由于液压致动器的往复移动的一方的移动是通过来自空气压源的空气而被直接实施的,因此,在应用于运动方向正负切换的液压致动器的情况下,无法使液压致动器顺利地移动。
7.在日本实用新型专利jps62-167908u中,如何实施两个切换阀的控制是不明确的。因此,可能无法恰当地驱动液压致动器。
8.本发明的目的在于,提供一种能够容易地实现液压致动器的控制的液压驱动装置。
9.根据本发明的某一方式,液压驱动装置具备:第一空液转换器以及第二空液转换器,其将从空气压源被供给的空气压转换为液压;液压致动器,其具有中空状的缸室、以能够往复移动的方式被设置于所述缸室内的活塞、和被设置于所述活塞的杆,所述缸室内通
过所述活塞而被划分为第一压力室和第二压力室,来自所述第一空液转换器的压力液体被供给至所述第一压力室,来自所述第二空液转换器的压力液体被供给至所述第二压力室;工作状态取得部,其取得所述液压致动器的工作状态;第一空气压阀,其被设置于从所述空气压源向所述第一空液转换器供给空气的第一供气路;第二空气压阀,其被设置于从所述空气压源向所述第二空液转换器供给空气的第二供气路;控制装置,其对压力液体向所述第一压力室以及所述第二压力室的供给进行控制,所述第一空液转换器为,将从所述空气压源被供给的空气压转换为液压的气液转换器或者将从所述空气压源被供给的空气压转换为增压后的液压的气液增压器,所述第二空液转换器为,将从所述空气压源被供给的空气压转换为液压的气液转换器或者将从所述空气压源被供给的空气压转换为增压后的液压的气液增压器,所述控制装置根据所述工作状态取得部的取得结果而对所述第一空气压阀以及所述第二空气压阀进行控制。
附图说明
10.图1为表示本发明的第一实施方式所涉及的液压驱动装置的示意图。
11.图2为表示本发明的第二实施方式所涉及的液压驱动装置的示意图。
12.图3为表示本发明的第二实施方式所涉及的液压驱动装置的变形例的示意图。
13.图4为表示本发明的实施方式所涉及的液压驱动装置的变形例的示意图。
14.图5为表示本发明的实施方式所涉及的液压驱动装置的变形例的示意图。
具体实施方式
15.以下,根据附图,对本发明的实施方式进行详细说明。
16.<第一实施方式>
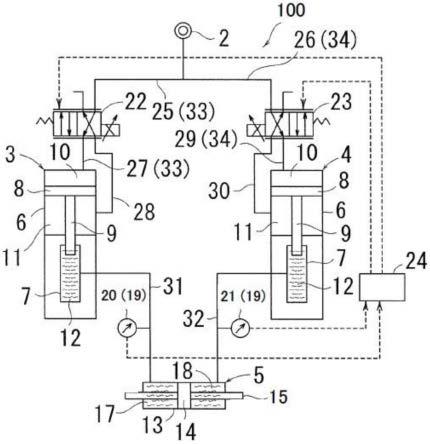
17.首先,参照图1,对本发明的第一实施方式所涉及的液压驱动装置100进行说明。图1为表示液压驱动装置100的示意图。
18.液压驱动装置100具备:第一空液转换器(空液转换单元)3以及第二空液转换器(空液转换单元)4,其将从空气压源2被供给的空气压转换为液压;液压致动器5,其通过两空液转换器3、4而进行工作。液压驱动装置100未特别地限于用途,例如,被用于在食品加工中被使用的具有关节的机器人。
19.第一空液转换器3以及第二空液转换器4为彼此相同的结构的气液增压器(air hydro booster)。气液增压器为将从空气压源2被供给的空气压转换为增压后的液压的空液增压器。空液转换器3、4具有:两个中空状的缸6、7,其具有大小不同的内径;活塞8,其以能够往复移动的方式而被设置于缸6内;杆9,其被设置于活塞8。两个缸6、7中的内径较大的缸6通过活塞8而被划分为第一空气压室10和第二空气压室11。另外,在内径较小的缸7的液压室12内,填充有水等工作液。在活塞8的第二空气压室11侧固定有杆9,杆9伴随着活塞8的移动而被插入至内径较小的缸7内。在本第一实施方式中,向空液转换器3、4供给空气的空气压源2例如为压缩机。
20.液压致动器5具有:中空状的缸室13;活塞14,其以能够往复移动的方式而被设置于缸室13内;杆15,其被设置于活塞14。缸室13通过活塞14而被划分为第一压力室17和第二压力室18。液压致动器5为两杆类型的液压缸,杆15被设置成从活塞14的两端面突出。另外,
液压致动器5也可以为单杆类型的液压缸。
21.液压驱动装置100还具备:工作状态取得部19,其取得液压致动器5的工作状态;第一空气压阀22,其被设置于从空气压源2向第一空液转换器3供给空气的流路;第二空气压阀23,其被设置于从空气压源2向第二空液转换器4供给空气的流路;控制装置(控制单元)24,其对空气压阀22、23进行控制。
22.在本第一实施方式中,工作状态取得部19具有:第一压力取得部(压力取得单元)20,其取得第一压力室17的压力液体的压力;第二压力取得部(压力取得单元)21,其取得第二压力室18的压力液体的压力。在本第一实施方式中,压力取得部20、21为对压力进行检测并取得的压力计。压力取得部20、21的取得结果(压力值)向控制装置24被输出。空气压阀22、23为对来自空气压源2的空气的流量进行调节并供给至空液转换器3、4的伺服阀。
23.如图1所示,在空气压源2上,设置有分支成两股的路径25和路径26。路径25与第一空气压阀22连接,在第一空气压阀22上连接有路径27的一端部。路径27的另一端部与第一空液转换器3的第一空气压室10连接。另外,路径28的一端部与第一空气压阀22连接,路径28的另一端部与第一空液转换器3的第二空气压室11连接。
24.路径26与第二空气压阀23连接。第二空气压阀23和第二空液转换器4的连接与第一空气压阀22和第一空液转换器3的连接相同。即,第二空气压阀23和第二空液转换器4的第一空气压室10经由对应于路径27的路径29而被连接,第二空气压阀23和第二空液转换器4的第二空气压室11经由对应于路径28的路径30而被连接。
25.如图1所示,第一空液转换器3和液压致动器5的第一压力室17经由从第一空液转换器3向第一压力室17供给压力液体的第一液压路31而被连接。具体而言,第一液压路31的一端部与第一空液转换器3的内径较小的缸7连接,并且,另一端部与第一压力室17连接。在第一液压路31上设置有第一压力取得部20。第二空液转换器4的内径较小的缸7和液压致动器5的第二压力室18经由从第二空液转换器4向第二压力室18供给压力液体的第二液压路32而被连接。在第二液压路32上设置有第二压力取得部21。第一压力取得部20以及第二压力取得部21也可以分别设置于第一压力室17以及第二压力室18。
26.控制装置24根据压力取得部20、21的取得结果而控制第一空气压阀22以及第二空气压阀23,并对压力液体从空液转换器3、4向液压致动器5的供给进行控制。压力取得部20、21以及空气压阀22、23与控制装置24电连接。控制装置24由具有中央运算装置(cpu)、只读存储器(rom)、随机存储器(ram)、以及输入输出接口(i/o接口)在内的微型计算机构成。控制装置24也能够由多个微型计算机构成。控制装置24例如通过根据压力取得部20、21的取得结果而进行反馈控制,从而控制液压致动器5。
27.接下来,对液压驱动装置100的动作进行说明。为了使液压致动器5工作,首先,驱动作为空气压源2的压缩机。如上所述,空液转换器3、4的结构彼此相同,从空气压源2向空液转换器3、4供给空气的结构也彼此相同,另外,从空气转换器3、4向液压致动器5供给压力液体的结构也彼此相同,因此,关于空液转换器3、4中的第一空液转换器3侧的动作,进行说明。在本第一实施方式中,从共同的空气压源2向空液转换器3、4供给空气。
28.通过驱动空气压源2并且操作第一空气压阀22,从而使空气压源2和第一空液转换器3的第一空气压室10经由路径25、27而连通,并从空气压源2经由第一空气压阀22向第一空气压室10供给空气。即,在从空气压源2向第一空液转换器3的第一空气压室10供给空气
的情况下,路径25、27成为从空气压源2向第一空气压室10供给空气的流路即第一供气路33。当这样从空气压源2向第一空气压室10供给空气时,第一空液转换器3的第二空气压室11和第一空气压阀22经由路径28而连通,第二空气压室11与外部连通。因此,当从空气压源2经由第一供气路33向第一空气压室10供给空气时,活塞8向扩张第一空气压室10的方向(图1的下方)移动。此时,第二空气压室11内的空气从第一空气压阀22经由路径28而向外部被排出。
29.当活塞8向下方移动时,被固定于活塞8的杆9进入液压室12内,液压室12内的工作液向液压室12的外部被压出相当于杆9的进入体积的量。借此,液压室12内的工作液作为增压后的压力液体,经由第一液压路31而向液压致动器5的第一压力室17被供给。液压室12内的工作液被增压的原因是,杆9的受压面积(杆9中的压出液压室12内的工作液的部分的面积)与活塞8的受压面积(活塞8中的受到空气压的部分的面积)相比,小例如r倍。
30.这样,第一空液转换器3的液压室12内的工作液经由第一液压路31而向液压致动器5的第一压力室17被压力送出。若液压致动器5的活塞14停止而未动作,则液压室12的压力成为r倍。与其相反,若对液压致动器5没有负载,则活塞14向图1的右方移动。液压室12的压力由液压致动器5的负载决定。
31.此处,虽然对第一空液转换器3的情况进行了说明,但是,第二空液转换器4的情况也是相同的。即,当从空气压源2经由由路径26、29构成的第二供气路34而向第二空液转换器4供给空气时,第二空液转换器4的液压室12内的工作液作为增压后的压力液体而经由第二液压路32向液压致动器5的第二压力室18被供给。通过这样同时操作两空气压阀22、23,从而使第一压力室17与第二压力室18的压差作用于活塞14,通过进一步向活塞14施加负载,从而决定了活塞14的加速度。因此,液压致动器5的活塞14由两空液转换器3、4的液压驱动。
32.如上所述,通过在空液转换器3、4中,使空气压源2和第一空气压室10连通,从而能够使活塞8在杆9进入液压室12内的方向(图1的下方)上移动。另一方面,为了使活塞8向杆9从液压室退出的方向(图1的上方)移动,只要使空气压源2和第二空气压室11连通即可。在该情况下,驱动空气压源2并且操作第一空气压阀22,使空气压源2和第一空液转换器3的第二空气压室11经由路径25、28而连通,并从空气压源2经由第一空气压阀22向第二空气压室11供给空气。此时,第一空液转换器3的第一空气压室10和第一空气压阀22经由路径27而连通,第一空气压室10与外部连通。因此,当从空气压源2向第二空气压室11供给空气时,活塞8向扩张第二空气压室11的方向(图1的上方)移动。此时,第一空气压室10内的空气从第一空气压阀22经由路径27而向外部被排出。
33.以上的液压致动器5的一系列的动作由控制装置24执行。控制装置24根据压力取得部20、21的取得结果而控制空气压阀22、23,并对压力液体向液压致动器5的压力室17、18的供给进行控制。具体而言,设定第一压力室17的压力液体的压力以及第二压力室18的压力液体的压力的目标值,并以活塞14针对上述目标值而进行追随的方式进行反馈控制。此时,由于活塞14的速度和负载正负切换,因此,根据必要的速度、负载的大小和方向而恰当地驱动空气压阀22、23。这样,通过压力取得部20、21监视压差,并根据该压差操作空气压阀22、23,从而使液压致动器5以杆15往复移动的方式进行工作。
34.在液压驱动装置100中,从空气压向液压的转换成为一种减速器,工作液的流量成
为空气的流量的1/r。因此,与仅仅通过空气压阀直接驱动致动器的情况相比较,精密性提高了r倍。另外,虽然空气压的压力最大为1mpa,但在将r设为10的情况下,能够获得10mpa的液压。
35.在液压驱动装置100中,从将空气压转换为液压的空液转换器3、4向液压致动器5供给液压。因此,与使用现有的液压泵以及液压伺服泵等的情况相比较,能够降低用于获得实用的液压的液压驱动装置所涉及的成本。另外,由于在液压驱动装置100中,能够通过空液转换器3、4使液压致动器5往复移动,因此,能够使液压致动器5平滑地往复移动。
36.另外,由于在液压驱动装置100中,空液转换器3、4为彼此相同的结构的气液增压器,因此,能够设为简易的结构。另外,在液压驱动装置100中,根据压力取得部20、21的取得信号,对压力液体向液压致动器5的压力室17、18的供给进行控制。因此,能够容易地控制两杆类型的液压致动器5。而且,由于在液压驱动装置100中,控制空气压阀22、23而对压力液体向压力室17、18的供给进行控制,因此,能够用价格便宜的结构来实现液压致动器5的控制。
37.另外,由于在液压驱动装置100中,液压致动器5的两压力室17、18被始终加压,因此,能够抑制空腔。此外,由于在液压驱动装置100中,空气压阀22、23为伺服阀,因此,能够容易地控制向空液转换器3、4的空气的流量
38.<第二实施方式>
39.接着,参照图2,对本发明的第二实施方式所涉及的液压驱动装置200进行说明。图2为表示液压驱动装置200的示意图。
40.第二实施方式所涉及的液压驱动装置200基本上与所述第一实施方式所涉及的液压驱动装置100相同。因此,以下,以两者不同的点为中心进行说明,对于相对应的结构标注相同的符号并进行说明。另外,关于第一实施方式以及第二实施方式中的共同事项,省略说明。
41.虽然在所述第一实施方式中,空液转换器3、4为气液增压器,但是在本第二实施方式中,空液转换器3、4为气液转换器(air hydro converter)。空液转换器3、4为彼此相同的结构的气液转换器。气液转换器为将从空气压源2被供给的空气压转换为增压后的液压的空液转换器。空液转换器3、4具备中空状的缸35、和以能够往复移动的方式而被设置于缸35内的活塞36。缸35内通过活塞36而被划分为空气室37和液室38,在液室38中填充有水等工作液。
42.在本第二实施方式中,从空气压源2分支为两股的流路中的一方为第一供气路33,该第一供气路33与第一空液转换器3的空气室37连接。分支为两股的流路中的另一方为第二供气路34,该第二供气路34与第二空液转换器4的空气室37连接。在本第二实施方式中,被设置于第一供气路33的第一空气压阀22以及被设置于第二供气路34的第二空气压阀23为将从空气压源2向空气室37被供给的空气压调节为预定的压力的电空调节器。电空调节器为与作为电信号的输入成比例地调节空气压的设备。第一空液转换器3的液室38和液压致动器5的第一压力室17经由第一液压路31而被连接,另一方面,第二空液转换器4的液室38和液压致动器5的第二压力室18经由第二液压路32而被连接。
43.液压驱动装置200除了具备所述第一实施方式所涉及的液压驱动装置100的结构之外,还具备第一供液阀39、第二供液阀40、以及小容量的液压泵41。第一供液阀39被设置
于第一液压路31,第二供液阀40被设置于第二液压路32。在本第二实施方式中,供液阀39、40为能够以接通断开的方式切换开闭的电磁阀,并内置有仅允许流体从空液转换器3、4分别向液压致动器5的流动的止回阀42。液压泵41为小型的伺服泵,并被构成为能够通过伺服马达43等电动马达而在两个方向上旋转,且能够选择性地在正反方向上旋转。
44.液压泵41经由第一辅助路44而与液压致动器5的第一压力室17连接,并且经由第二辅助路45而与液压致动器5的第二压力室18连接。在本第二实施方式中,第一液压路31和第一辅助路44的一部分在液压致动器5的第一压力室17侧成为共同路。第一压力取得部20被设置于第一液压路31和第一辅助路44的共同路,第一供液阀39被设置于与共同路相比靠上游侧的第一液压路31。另外,第二液压路32和第二辅助路45的一部分在液压致动器5的第二压力室18侧成为共同路。第二压力取得部21被设置于第二液压路32和第二辅助路45的共同路,第二供液阀40被设置于与共同路相比靠上游侧的第二液压路32。
45.在本第二实施方式中,控制装置24也根据压力取得部20、21的取得结果而控制空气压阀22、23,并对压力液体向液压致动器5的压力室17、18的供给进行控制。该控制与所述第一实施方式的反馈控制相同。
46.在本第二实施方式中,控制装置24也根据压力取得部20、21的取得结果而控制液压泵41。供液阀39、40以及液压泵41的伺服马达43与控制装置24电连接。
47.接下来,对液压驱动装置200的动作进行说明。在液压驱动装置200中,存在使液压致动器5高速地进行工作的情况、和使液压致动器5低速地进行工作的情况。在前者的情况下,液压致动器5的杆15以较低的负载迅速地进行往复移动。在后者的情况下,液压致动器5的杆15以较高的负载慢慢地进行往复移动。
48.在较低的负载的高速驱动时,使用空液转换器3、4。在该情况下,控制装置24在停止液压泵41并打开了供液阀39、40的状态下,驱动空液转换器3、4。在该情况下,与上述第一实施方式的反馈控制相同,通过根据压力取得部20、21的取得结果而控制空气压阀22、23,从而对压力液体向液压致动器5的压力室17、18的供给进行控制。在本第二实施方式中,空液转换器3、4为气液转换器。因此,当从空气压源2经由第一空气压阀22向第一空液转换器3的空气室37供给空气时,活塞36向扩张空气室37的方向(图2的下方)移动。借此,第一空液转换器3的液室38内的工作液作为压力液体,经由第一液压路31而向液压致动器5的第一压力室17被供给。另一方面,当从空气压源2经由第二空气压阀23向第二空液转换器4的空气室37供给空气时,从第二空液转换器4经由第二液压路32向液压致动器5的第二压力室18供给压力液体。
49.在较高的负载的低速驱动时,使用液压泵41。在该情况下,控制装置24在关闭供液阀39、40的状态下驱动液压泵41。具体而言,设定第一压力室17的压力液体的压力以及第二压力室18的压力液体的压力的目标值,并以活塞14针对上述目标值而进行追随的方式进行反馈控制。此时,由于活塞14的速度和负载正负切换,因此,根据必要的速度、负载的大小和方向而恰当地驱动液压泵41。这样,根据压力取得部20、21的取得结果而控制液压泵41。在本第二实施方式中,通过关闭供液阀39、40而驱动液压泵41,从而能够使必要的压差作用于活塞14。
50.由于在本第二实施方式所涉及的液压驱动装置200中,能够通过小型的液压泵41使液压致动器5进行工作,因此,与通过气液转换器使液压致动器5进行工作的情况相比较,
能够进一步精密地控制液压致动器5。另外,由于在液压驱动装置200中,空液转换器3、4为彼此相同的结构的气液转换器,因此,能够设为简易的结构。此外,由于在液压驱动装置200中,在供液阀39、40中内置有止回阀42,液压致动器5的压力室17、18不会低于空气室37的空气压,因此,能够抑制空腔。
51.接着,参照图3,对作为第二实施方式的变形例的液压驱动装置201进行说明。图3为表示液压驱动装置201的示意图。此处,以与液压驱动装置200不同的点为中心进行说明,其他结构以及控制应用了上述的结构以及控制。
52.在本变形例中,具备液压缸46和其驱动装置(驱动单元)47,以代替在所述第二实施方式所涉及的液压驱动装置200中被使用的液压泵41。液压缸46具有中空状的缸本体48和以能够往复移动的方式而被设置于缸本体48内的可动活塞49。缸本体48内通过可动活塞49而被划分为第一液室50和第二液室51,在第一液室50以及第二液室51中填充有水等工作液。第一液室50经由第一辅助路44而与液压致动器5的第一压力室17连接,第二液室51经由第二辅助路45而与液压致动器5的第二压力室18连接。驱动装置47为使液压缸46的可动活塞49往复移动的单元,在本变形例中,为小型的马达。驱动装置47经由杆52而与液压缸46的可动活塞49连接。
53.在本变形例中,控制装置24也与上述第二实施方式的反馈控制相同,通过根据压力取得部20、21的检测结果而控制空气压阀22、23,从而对压力液体向液压致动器5的压力室17、18的供给进行控制。另外,在本变形例中,控制装置24也根据压力取得部的取得结果而控制液压缸46的驱动装置47。液压缸46的驱动装置47与控制装置24电连接。
54.接下来,对液压驱动装置201的动作进行说明。在液压驱动装置201中,与液压驱动装置200相同,存在液压致动器5的较低的负载下的高速驱动的情况、和液压致动器5的较高的负载下的低速驱动的情况。在前者的情况下,与液压驱动装置200的高速驱动时相同,通过空液转换器3、4使液压致动器5工作。此时,控制装置24在停止液压泵46的驱动装置47并打开了供液阀39、40的状态下,驱动空液转换器3、4。
55.在后者的情况下,使用液压缸46。此时,控制装置24在关闭了供液阀39、40的状态下驱动驱动装置47,并使液压缸46的可动活塞49往复移动。具体而言,设定第一压力室17的压力液体的压力以及第二压力室18的压力液体的压力的目标值,并以活塞14针对上述目标值而进行追随的方式进行反馈控制。此时,由于活塞14的速度和负载正负切换,因此,根据必要的速度、负载的大小和方向而恰当地驱动驱动装置47。这样,根据压力取得部20、21的取得结果而控制驱动装置47。借此,通过液压缸46的可动活塞49往复移动,从而从第一液室50向第一压力室17供给工作液,并从第二液室51向第二压力室18供给工作液。在本变形例中,为了确保作用于活塞14的必要的压差,液压缸46的缸本体48的容积与液压致动器5的缸室13的容积相比足够小。
56.在本变形例所涉及的液压驱动装置201中,能够通过液压缸46和其驱动装置47而使液压致动器5进行工作。因此,能够通过液压缸46微量地调节被供给至液压致动器5的工作液的流量,与使作为气液转换器的液压致动器5工作的情况相比较,能够更加精密地控制液压致动器5。
57.接下来,对液压驱动装置100、200、201的变形例进行说明。以下的变形例也在本发明的范围内,也能够将以下的变形例和上述图1~图3所示的液压驱动装置100、200、201的
结构组合或者将以下的变形例彼此组合。另外,在以下的变形例的说明中,对于与上述实施方式相同的结构,使用相同的符号来说明。
58.(1)虽然在所述第一实施方式中,空气压阀22、23为伺服阀,但是,也可以为电空调节器。在该情况下,从空气压源2分支为两股的流路中的一方为与第一空液转换器3的第一空气压室10连接的第一供气路33,另一方为与第二空液转换器4的第一空气压室10连接的第二供气路34。另外,空液转换器3、4的第二空气压室11被构成为能够将内部的空气向外部开放。
59.(2)在所述第一实施方式中,也可以设为具备所述第二实施方式的液压泵41、所述变形例的液压缸46和其驱动装置47的结构。
60.(3)在所述第一实施方式中,空液转换器3、4为气液增压器,在第二实施方式以及所述变形例中,空液转换器3、4为气液转换器。但是,空液转换器3、4中的一方也可以为气液增压器,并且另一方也可以为气液转换器。
61.(4)在液压驱动装置100、200、201中,对取得压力室17、18的压力液体的压力的压力取得部20、21为对压力进行检测并取得的压力计的形态进行了说明。作为压力取得部,也可以通过运算而取得压力室17、18的压力液体的压力,以代替检测压力室17、18的压力液体的压力。例如,如图4所示,也可以废除被设置于液压路31、32的压力计,在空液转换器3、4上分别设置对空气压室10的空气的压力进行检测的压力计60、61,将上述压力计60、61的检测值向控制装置24进行输出,并在控制装置24中,根据压力计60、61的检测值而对压力室17、18的压力液体的压力进行运算。具体而言,控制装置24在由压力计60、61的检测值和活塞8以及杆9的受压面积确定的力的平衡式中加入液压路31、32的压力损失等,从而对压力室17、18的压力液体的压力进行运算。由于在本变形例中,控制装置24为通过运算而取得压力室17、18的压力液体的压力的结构,因此,控制装置24相当于取得液压致动器5的工作状态的工作状态取得部。另外,作为本变形例,虽然在图4中示出了液压驱动装置100的变形例,但是,本变形例也能够应用于液压驱动装置200、201中。
62.(5)在液压驱动装置100、200、201中,对控制装置24根据压力室17、18的压力液体的压力而控制空气压阀22、23的形态进行了说明。作为替代,控制装置24也可以根据压力室17、18的压力液体的压力以及杆15的位置而控制空气压阀22、23。具体而言,设定第一压力室17的压力液体的压力以及第二压力室18的压力液体的压力的目标值,并以活塞14针对上述目标值而进行追随的方式进行反馈控制,并且,设置杆15的位置的目标值,并以活塞14针对该目标值而进行追随的方式进行反馈控制。借此,提高了液压致动器5的控制的精度。如图5所示,杆15的位置由对杆15的位置进行检测的位置取得部62取得。位置取得部62例如为被设置于液压致动器5的行程传感器。位置取得部62的取得结果向控制装置24被输出。在本变形例中,压力取得部20、21以及位置取得部62相当于取得液压致动器5的工作状态的工作状态取得部19。
63.(6)作为上述(5)中说明的位置取得部,也可以通过运算而取得杆15的位置,以代替检测杆15的位置。例如,在图5所示的液压驱动装置100中,废除被设置于液压致动器5的位置取得部62,在空液转换器3、4上分别设置对活塞8的位置进行检测的位置检测部,将上述位置检测部的检测值向控制装置24进行输出,并在控制装置24中,根据位置检测部的检测值而对杆15的位置进行运算。具体而言,控制装置24在由在位置检测部中被检测出的活
塞8的位置、和活塞8、杆9、以及活塞14的受压面积确定的体积保存式中加入液压路31、32的流量损失等,从而对杆15的位置进行运算。作为对活塞8的位置进行检测的位置检测部,既可以在活塞8上安装向缸6的外部突出的杆之后,将对该杆的位置进行检测的行程传感器设置于缸6,另外,也可以在活塞8上安装磁体,并将以非接触的方式对活塞8的位置进行检测的磁式传感器设置于缸6。由于在本变形例中,控制装置24为通过运算而取得杆15的位置的结构,因此,控制装置24相当于取得液压致动器5的工作状态的工作状态取得部。另外,作为本变形例,虽然示出了图5所示的液压驱动装置100的变形例,但是,本变形例也能够应用于液压驱动装置200、201中。在图2所示的液压驱动装置200的情况下,只要在空液转换器3、4上分别设置对活塞36的位置进行检测的位置检测部即可,在图3所示的液压驱动装置201的情况下,只要在液压缸46上设置对可动活塞49的位置进行检测的位置检测部即可。
64.(7)在液压驱动装置100、200、201中,对控制装置24根据压力室17、18的压力液体的压力而控制空气压阀22、23的形态进行了说明。作为替代,控制装置24也可以根据压力室17、18的压力液体的压力以及作用于杆15的负载而控制空气压阀22、23。具体而言,设定第一压力室17的压力液体的压力以及第二压力室18的压力液体的压力的目标值,并以活塞14针对上述目标值而进行追随的方式进行反馈控制,并且,设置杆15的负载的目标值,并以活塞14针对该目标值而进行追随的方式进行反馈控制。借此,进一步提高了液压致动器5的控制的精度。另外,控制装置24也可以根据压力室17、18的压力液体的压力、杆15的位置、以及作用于杆15的负载而控制空气压阀22、23。杆15的负载由对杆15的负载进行检测的负载取得部取得。负载取得部例如为被设置于液压致动器5的负载传感器。负载取得部的取得结果向控制装置24被输出。在本变形例中,负载取得部也相当于取得液压致动器5的工作状态的工作状态取得部19。另外,作为负载取得部,也可以通过运算而取得杆15的负载。例如,控制装置24根据压力取得部20、21的取得结果而对作用于活塞14的压差进行运算,并根据该压差和活塞14的受压面积而对杆15的负载进行运算。另外,如上述(4)中所说明的那样,在控制装置24根据空气压室10的空气的压力而对压力室17、18的压力液体的压力进行运算的情况下,控制装置24根据由运算获得的压力室17、18的压力液体而对作用于活塞14的压差进行运算,并根据该压差和活塞14的受压面积而对杆15的负载进行运算。这样,在通过运算而取得杆15的负载的情况下,控制装置24相当于取得液压致动器5的工作状态的工作状态取得部。
65.以下,对本发明的实施方式的结构、作用、以及效果进行总结说明。
66.液压驱动装置100、200、201为以下结构,即,来自第一空液转换器3的压力液体被供给至液压致动器5的第一压力室17,另一方面,来自第二空液转换器4的压力液体被供给至液压致动器5的第二压力室18。因此,能够价格便宜地实现可以获得实用的液压的装置。另外,能够使液压致动器5平滑地往复移动。另外,根据取得液压致动器5的工作状态的工作状态取得部19的取得结果,对压力液体向液压致动器5的供给进行控制。因此,能够容易地控制两杆类型的液压致动器5,并高精度地实施液压致动器5的往复移动。另外,根据工作状态取得部19的取得结果,对被设置于从空气压源2向第一空液转换器3供给空气的第一供气路33的第一空气压阀22以及被设置于从空气压源2向第二空液转换器4供给空气的第二供气路34的第二空气压阀23进行控制。经由这种空气压阀22、23而被供给空气的空液转换器3、4为气液转换器或者气液增压器。因此,能够通过价格便宜的结构对空气向空液转换器3、
4的供给进行控制,进而,对液压致动器5的往复移动进行控制。
67.另外,在液压驱动装置200中,能够在两方向上旋转的液压泵41经由第一辅助路44而与第一压力室17连接,并且经由第二辅助路45而与第二压力室18连接。因此,能够驱动液压泵41而使液压致动器5进行工作,因此,能够实施液压致动器5的更加精密的控制。
68.另外,液压驱动装置201具备液压缸46和其驱动装置47。液压缸46的第一液室50经由第一辅助路44而与第一压力室17连接,并且第二液室51经由第二辅助路45而与第二压力室18连接。驱动装置47为使液压缸46内的可动活塞49往复移动的单元。因此,能够通过驱动装置47使液压缸46的可动活塞49往复移动而使液压致动器5工作,因此,能够实施液压致动器5的更加精密的控制。
69.此外,由于在液压驱动装置100、200、201中,第一空气压阀22以及第二空气压阀23为伺服阀或者电空调节器,因此,能够对向空液转换器3、4的空气的流量或者压力进行调节。
70.以上,对本发明的实施方式进行了说明,但是,上述实施方式仅仅表示本发明的应用例的一部分,并不是将本发明的技术范围限定于上述实施方式的具体结构的意思。
71.本技术要求基于在2019年10月7日向日本专利局提出的日本特愿2019-184405的优先权,并通过参照的方式在本说明书中引入了该申请的全部内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1