用于流体管理系统的控制系统的制作方法
1.本公开涉及用于流体管理系统的控制系统。
背景技术:
2.电动马达将电能转换为机械能,提供给离心机的叶轮。离心机可为流体管理系统的一部分。
技术实现要素:
3.在一个方面,一种控制系统包括:控制器,该控制器被配置为:访问机械地联接到离心机的叶轮的马达的估计扭矩和估计速度;访问与该叶轮的已知速度相关联的至少一组预先确定的性能数据值,其中每组预先确定的性能数据值包括:多个流量值和多个性能度量值;基于该估计扭矩、该估计速度和该至少一组预先确定的性能数据值来确定该离心机的操作点;将所确定的操作点与和该离心机相关联的最佳效率点(bep)进行比较;并且基于该比较来确定是否改变该马达的速度。
4.实施方式可包括下列特征中的一个或多个。控制器可被配置为访问与离心机相关联的多组预先确定的数据值,并且在这些实施方式中,该多组中的每一组可与叶轮的不同已知速度相关联,并且性能度量值可包括压头值和效率值。控制器可被进一步配置为将马达的估计速度与叶轮的已知速度进行比较;并且如果马达的估计速度和已知速度的相似度差值在速度阈值内,则控制器可基于预先确定的压头值和预先确定的效率值来确定机器功率特性;并且如果马达的估计速度和已知速度的相似度差值不在速度阈值内,则控制器可确定更新的一组压头值和更新的一组效率值;并且控制器可基于该更新的一组压头值和该更新的一组效率值来确定机器功率特性。控制器还可被进一步配置为根据该机器功率特性来确定对应于该估计扭矩的功率值,以及确定流量操作点,该流量操作点是对应于所确定的功率值的流量值。为了确定离心机的操作点,控制器可被配置为基于流量操作点来确定效率操作点和压头操作点。为了将所确定的操作点与最佳效率点(bep)进行比较,控制器可被配置为将所确定的效率操作点与最佳效率点(bep)进行比较。如果控制器改变马达的速度,则在改变马达的速度之后,控制器可被进一步配置为:确定在流量值下的更新的一组压头值和在该流量值下的更新的一组效率值;并且基于该更新的一组压头值和该更新的一组效率值来更新机器功率特性。
5.控制器可改变马达的速度,从而改变由叶轮移动的流体的流量,并且控制器还可被进一步配置为在改变马达的速度之后再次确定效率操作点。
6.在另一方面,用于泵系统的控制系统包括控制器,该控制器被配置为:确定泵系统的当前操作点是否在有界操作区域中,其中该当前操作点包括由该泵系统移动的流体的流量的当前值以及性能度量的当前值;并且有界操作区域由流量的最小值、流量的最大值、性能度量的最小值和性能度量的最大值限定;并且如果当前操作点不在有界操作区域中,则控制器被配置为调节机械地联接到泵系统的马达的参数,从而改变该当前操作点,直到当
前操作点在有界操作区域中。
7.实施方式可包括下列特征中的一个或多个。控制器可被配置为在确定当前操作点是否在有界操作区域中之前,将由泵系统移动的流体的流量的当前值与和该泵系统相关联的最佳效率点流量进行比较;如果当前流量小于最佳效率点流量,则控制器可在确定当前操作点是否在有界操作区域中之前增加马达的速度;并且如果当前流量大于最佳效率点流量,则控制器可在确定当前操作点是否在有界操作区域中之前减小马达的速度。马达的参数可包括马达的速度;并且如果当前操作点不在有界操作区域内并且当前流量小于最佳效率点流量,则控制器可减小马达的速度,直到当前操作点在有界操作区域中;并且如果当前操作点不在有界操作区域内并且当前流量大于最佳效率点流量,则控制器可增加马达的速度,直到当前操作点在有界操作区域中。
8.控制系统还可被配置为确定性能度量的当前值是否可接受。性能度量可包括操作效率,并且为了确定操作效率的当前值是否可接受,控制器可被配置为将操作效率的当前值与最佳效率点进行比较。如果操作效率的当前值与最佳效率点之间的差值小于效率阈值,则该操作效率的该当前值可被认为是可接受的。性能度量可为流量或操作压头。
9.在一些实施方式中,最小流量、最大流量、性能度量的最小值和性能度量的最大值中的一者或多者由泵系统的操作员设定。
10.在另一方面,访问由离心机移动的流体的流量的设定点值;基于流量的设定点值和离心机的最佳效率点流量来确定第一时间段的持续时间和第二时间段的持续时间;控制离心机在第一时间段的持续时间内以最佳效率点流量操作;并且控制离心机在第二时间段的持续时间内以零流量操作。第一时间段的持续时间和第二时间段的持续时间使得流体在第一时间段和第二时间段内的平均流量为流量的设定点值。
11.实施方式可包括下列特征中的一个或多个。第一时间段可紧接在第二时间段之前。可从离心机的操作员接收流量的设定点值。可通过控制马达控制装置来控制离心机,该马达控制装置向机械地联接到该离心机的叶轮的马达提供马达功率信号。
12.本文描述的技术中的任一技术的实施方式可以包括装置、设备、控制器、控制系统以及流体管理系统和/或方法。一个或多个实施方式的细节在附图和以下说明书中列出。根据说明书和附图以及权利要求书,其他特征将显而易见。
附图说明
13.图1是流体管理系统的示例的框图。
14.图2是离心机的示例的框图。
15.图3是流体管理系统的另一示例的框图。
16.图4、图5、图9、图10和图15是各种示例性过程的流程图。
17.图6是p-q曲线的示例。
18.图7是效率曲线的示例。
19.图8和图11至图14是离心机的性能特性曲线的示例的图示。
20.图16是叶轮速度随时间变化的曲线图的示例。
21.图17是离心机的流量随时间变化的曲线图的示例。
具体实施方式
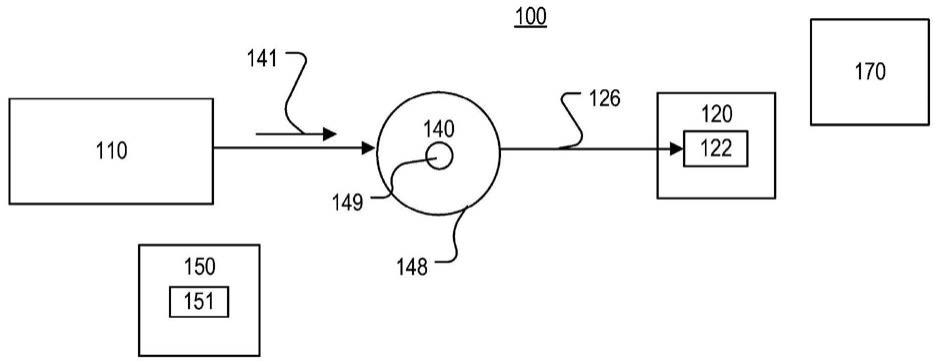
22.参考图1,示出了流体管理系统100的框图。流体管理系统100可为例如泵送系统。流体管理系统100包括用于在过程170中移动流体的离心机120。过程170可为例如工业、商业过程或住宅过程。举例来说,过程170可为:冷却系统;供热、通风和制冷(hvac)系统;废水或废液处理系统;化学处理系统;或过滤系统。
23.流体管理系统100包括控制器150。如下所述,控制器150在不依赖于传感器(诸如流量计和压力传感器)的情况下确定离心机120的操作点。此外,控制器150使用预先确定的性能数据151来确定操作点,该预先确定的性能数据在机器120部署到系统中之前确定,并且在离心机120已部署到系统100中之后不执行离心机120的表征。控制器150还使得离心机120能够更有效地操作。
24.离心机120由马达140驱动。马达140可为直流(dc)马达或交流(ac)马达。举例来说,例如,马达140可为无刷dc马达、永磁ac马达或ac感应马达等。马达140可为单相马达或多相马达。虽然图1示出了一个马达,但流体管理系统100可包括多于一个马达。流体管理系统100还包括马达控制装置110,该马达控制装置向马达140提供马达功率信号141。马达控制装置110是被配置为驱动马达140的任何类型的装置。例如,马达控制装置110可为变频驱动器(vdf)或可调速驱动器(asd)。
25.马达功率信号141为ac电信号,其具有足以驱动马达140的电压(v)和电流(i)。在马达140为多相马达的实施方式中,马达功率信号141为多相ac电信号。马达140包括定子148和转子149。定子148每相包括一个绕组。转子149响应于接收马达功率信号141而相对于定子148旋转。转子149的方向和速度由马达功率信号141的特性(振幅、频率和/或相位)确定。
26.离心机120为任何类型的离心机。例如,离心机120可为泵、鼓风机或压缩机。还参考图2,离心机120包括主体121、流体通过其流入主体121的入口123、流体通过其流出主体121的出口124以及叶轮122。叶轮122经由连杆126联接到转子149。连杆126是能够将由马达140产生的机械能传送到叶轮122的任何类型的连接件。例如,连杆126可包括杆、齿轮、轴或此类器件的组合。叶轮122的旋转向主体121中的流体施加旋转能量,并且在入口123与出口124之间传送主体121中的流体。
27.离心机120与性能度量相关联,包括压头(h)和效率。离心机120的效率是输入马力(其为输入扭矩乘以叶轮122的旋转速度)与流量(q)之间的关系。机器120的压头(h)是在出口124处实现给定流量(q)所需的压力p的量。流量(q)具有随时间的体积单位,例如立方米/秒。压头(h)具有压力单位,例如磅/平方英寸或帕斯卡。叶轮122的旋转速度或速度表示为每单位时间的旋转数。压头(h)与流量(q)之间的关系被称为h-q曲线。离心机120还与系统压头(hsys)相关联,该系统压头与通过增加压头(h)产生的流动相反。系统压头(hsys)考虑了与离心机120一起使用的构型和部件(诸如管道或在出口124与过程170之间输送流体的其他类型的传送系统)。系统压头(hsys)曲线在离心机120的操作点处与h-q曲线相交。
28.离心机120与预先确定的性能数据151相关联。预先确定的性能数据151可由离心机120的制造商提供并且在离心机120被投入使用于流体管理系统100中之前被收集。
29.图4、图5、图9、图10和图15示出了用于在使用期间确定离心机120的操作点和/或控制离心机120的操作的过程的流程图。在讨论这些技术之前,相对于图3讨论马达控制装
置110和控制器150的示例性实施方式的概述。
30.图3是包括控制器350的流体管理系统300的框图。控制器350是控制器150(图1)的实施方式。流体管理系统300包括马达控制装置310,该马达控制装置经由电连接件(诸如电缆)联接到马达140。马达控制装置310可为例如可变速驱动器(vsd)、可调速驱动器(asd)或可变频驱动器(vfd)。马达控制装置310向马达140提供马达功率信号341。马达140驱动离心机120。
31.马达控制装置310从配电网络301接收ac电力,该配电网络可为例如向工业、商业和/或住宅客户提供电力的多相电力网。ac配电网络301分配具有(例如50赫兹或60赫兹(hz)的)基频的ac电功率。配电网络101可具有(例如对于低电压高达690伏特(v)均方根(rms)并且对于中电压或高电压高于690v(例如,10kv)的)操作三相线间电压。网络301可包括例如一条或多条传输线、分配线、配电或变电站变压器、电缆和/或用于传输电力的任何其他机构。
32.马达控制装置310包括在输入节点314处从分配网络301接收ac电功率305的电气网络312。马达控制装置310包封在外壳或壳体311中。外壳311为由保护电气网络312的实心且坚固的材料制成的三维主体。马达控制装置310还包括输出节点309。马达140在输出节点309处连接到马达控制装置310。
33.电气网络312基于来自分配网络301的ac电功率305生成ac马达功率信号341。电气网络312包括转换器360和逆变器380。转换器360包括电气网络362,该电气网络被配置为将ac电功率305转换为直流(dc)电功率313。转换器360可为例如有源前端(afe)或脉宽调制(pwm)整流器,或18脉冲整流器。电气网络362包括电子部件,诸如被布置为形成整流器或处于允许将ac电源305转换为dc电源313的任何其他构型的二极管。
34.逆变器380包括电气网络382,该电气网络被配置为将dc电功率313转换为ac马达功率信号341。电气网络382可包括功率晶体管或其他可控开关器件。例如,电气网络382可以包括三个半桥电路,每个半桥电路包括串联连接的两个开关元件(诸如,功率晶体管)。每对开关元件都从dc电源(例如,电池、dc电源或其他dc电源)接收直流(dc)电压。在这些实施方式中,逆变器380通过将基于命令信号的信号施加到每对开关元件来生成三相脉宽调制(pwm)信号。通过控制半桥电路的开关操作来确定三相pwm马达功率信号341的特性(振幅、频率和相位)。pwm技术可基于任何类型的控制算法来实现,诸如6步电子换向、各种面向场的控制、空间矢量pwm或正弦pwm。
35.控制器350经由控制链路377联接到马达控制装置310。控制链路377是能够承载数据、信息和/或命令的任何类型的路径。例如,控制链路377可为电缆、印刷电路板上的铜迹线或无线数据连接件。控制器350包括电子处理模块352、电子存储装置354和i/o接口356。在一些实施方式中,电子处理模块352、电子存储装置354和i/o接口356被实现为微控制器。此外,虽然控制器350被示出为在外壳311的外部,但控制器350可被包封在外壳311中。
36.电子处理模块352包括一个或多个电子处理器。模块352的电子处理器可以是任何类型的电子处理器,可以是多种类型的处理器,并且可包括或可不包括通用中央处理单元(cpu)、图形处理单元(gpu)、微控制器、现场可编程门阵列(fpga)、复杂可编程逻辑设备(cpld)、数字信号处理器(dsp)、微控制器单元(mcu)和/或专用集成电路(asic)。
37.电子存储装置354是能够以计算机程序或软件的形式存储数据和指令的任何类型
的电子存储器,并且可包括多种类型的存储器。例如,电子存储装置354可包括易失性和/或非易失性部件。电子存储装置354和处理模块352耦接,使得处理模块352能够从电子存储装置354读取数据并将数据写入该电子存储装置。
38.过程400、500、900、1000和1500可被实现为存储在电子存储装置354上并由电子处理模块352执行的指令集合。另外,用于驱动逆变器380的电子网络382的pwm技术或其他控制技术可被实现为存储在电子存储装置354上的可执行指令或计算机软件的集合。
39.此外,预先确定的性能数据151可存储在电子存储装置354上。预先确定的性能数据151包括压头(h)的n个数据值,其中n是大于二的任何整数,并且n个数据值中的每一者对应于针对叶轮122的特定旋转速度的出口124处的流量。例如,如果n为5,则预先确定的性能数据151包括压头(h)的五(5)个值,其中压头(h)的五个值中的每一者针对叶轮122的特定旋转速度下的不同流量。预先确定的性能数据151还包括机器120的效率值。效率值提供了效率与流量之间的关系。效率值还包括最佳效率点(bep),这是机器120能够操作的最大效率。bep可表示为介于0%和100%之间的百分比或表示为介于0和1之间的值。
40.预先确定的性能数据151可包括m组预先确定的数据,其中m组中的每一组与叶轮122的不同速度相关联,并且其中m是大于1的整数值。例如,预先确定的性能数据151可包括在叶轮122的m个不同速度中的每一者下的n对压头(h)、流量(q)值。作为预先确定的性能数据151的一部分的m个速度被称为m个预先确定的叶轮122速度。叶轮122的m个不同速度中的每一者与bep流量(q_bep)相关联。特定叶轮122速度的bep流量是离心机120最有效的流量。bep流量(q_bep)随叶轮122速度而变化。
41.预先确定的性能数据151可存储为离散值的集合。例如,预先确定的性能数据151可以是m组n对数据值的集合,其中每对数据值包括与相关联流量(q)值配对的度量(例如,压头(h)或效率)值。预先确定的性能数据151可存储在查找表或数据库中。在一些实施方式中,预先确定的性能数据151另选地或除此之外以将度量(例如,压头(h)或效率)中的一者与流量(q)相关联的公式的形式存储。
42.i/o接口356是允许人类操作员、外部设备和/或自主过程与控制器350交互的任何接口。i/o接口356可包括例如音频输入和/或输出(诸如扬声器和/或麦克风)、视觉输出(诸如灯、发光二极管(led))、串行或并行端口、通用串行总线(usb)连接和/或任何类型的网络接口,诸如以太网。i/o接口356还可允许通过例如ieee 802.11、蓝牙、移动电话或近场通信(nfc)连接进行无物理接触的通信。控制器350可例如通过i/o接口356操作、配置、修改或更新。
43.在一些实施方式中,i/o接口356使得控制器350能够与远程站395通信。远程站395可以是操作员能够通过其与控制器350进行通信而不与控制器350进行物理接触的任何类型的站点。例如,远程站395可以是基于计算机的工作站,智能电话、平板电脑、或经由服务协议连接到控制器350的膝上型计算机、或经由射频信号连接到控制器350的远程控件。
44.图4是过程400的流程图。过程400是用于确定离心机120的操作点的过程的示例。过程400可由控制器150或控制器350执行。例如,用于实现过程400的机器可读指令可存储在电子存储装置374上并由电子处理模块372执行。相对于流体管理系统300讨论了过程400;然而,过程400可应用于其他流体管理系统。
45.访问与马达140相关的信息(410)。所访问信息包括马达140的速度(转子149的旋
转速度)和在马达140可操作且接收到马达功率信号341时由马达140产生的扭矩。马达140的速度和由马达140产生的扭矩可以本领域已知的任何方式获得。
46.在一些实施方式中,在不使用速度或扭矩传感器的情况下,相对于马达功率信号341估计马达140的速度和由马达140产生的扭矩。例如,可基于马达功率信号341的电压的值或振幅、马达功率信号341的电压和/或电流的频率、马达140的负荷值(其可由功率传感器直接感测或近似等于输入功率),以及与马达140相关联的铭牌数据来估计马达140的速度和马达140的扭矩。铭牌数据包括马达140的额定功率、额定速度、额定频率和额定电压。美国专利8,203,298中提供了用于估计马达140的速度和马达140的扭矩的此类技术的示例。用于估计速度和力矩的铭牌信息和指令可存储在电子存储装置354上并由电子处理模块352执行。
47.在其他示例中,所估计的速度和扭矩由单独的控制器确定并经由i/o接口356提供给控制器350。在其他实施方式中,流体管理系统300的操作员可经由i/o接口356向控制器350提供马达140的速度和扭矩的估计值。此外,在一些实施方式中,基于扭矩和/或速度的先前估计、输入或已知值来确定马达140的扭矩和/或速度。例如,与先前的速度相比,马达140的速度可增加或减小已知的恒定量。在这些实施方式中,通过从先前速度值中添加或减去已知量来确定马达140的当前速度。
48.访问预先确定的性能数据151(420)。预先确定的性能数据151可包括例如机器120针对五个对应流量(q)的压头(h)的五(5)个值,以及机器120针对五个对应流量(q)的效率的五个值。
49.确定机器120的操作点(430)。操作点基于来自410的马达140的所测量或所估计的速度和扭矩以及来自420的所访问的预先确定的性能数据151来确定。操作点确定不依赖于与机器120相关联的传感器。例如,在入口123或出口124处不使用流量计或压力计的情况下确定操作点。此外,在其中没有传感器用于估计马达140的速度和扭矩的实施方式中,仅根据马达功率信号341和关于马达140的信息来确定或估计操作点。相对于图5提供了确定机器120的操作点的详细示例。
50.图5是过程500的流程图。方法500是用于确定离心机120的操作点的过程的另一个示例。过程500可由控制器150或控制器350执行。例如,用于实现过程500的机器可读指令可存储在电子存储装置374上并由电子处理模块372执行。相对于流体管理系统300讨论了过程500;然而,过程500可应用于其他流体管理系统。
51.马达140的估计速度(rpm_est)和扭矩(p_est)可基于上文相对于图4所讨论的元素(410)来获得。将马达140的速度(rpm_est)与m个预先确定的叶轮122的速度进行比较(510)。具体地讲,控制器350确定马达140的估计速度(rpm_est)是否对应于m个预先确定的叶轮122速度中的任一者(515)。例如,在一些实施方式中,连杆126被构造成使得转子149的速度与叶轮122的速度相同。在这些实施方式中,将估计速度(rpm_est)与m个预先确定的叶轮122速度直接进行比较。例如,可从m个预先确定的叶轮122速度中的每一者减去估计速度(rpm_est),以确定估计速度(rpm_est)是否与m个预先确定的叶轮122速度中的一者相同。在其他实施方式中,连杆126以更复杂的方式(例如,通过齿轮系统)将转子149的机械能传送到叶轮122,并且转子149的速度与叶轮122的速度不同。在这些实施方式中,首先根据连杆126的影响来调节转子149的估计速度(rpm_est),然后将调节的估计速度与m个预先确定
的叶轮122速度进行比较,以确定估计速度(rpm_est)是否对应于m个预先确定的叶轮122速度中的一者。
52.首先讨论估计速度(rpm_est)对应于m个预先确定的叶轮速度中的一者的情形。
53.如果估计速度(rpm_est)与m个预先确定的叶轮122速度相同或差值在阈值差值内,则过程500使用与该预先确定的叶轮122速度相关联的预先确定的性能数据151中的值来计算p-q曲线(525)。p-q曲线为机器120使用的功率(p)(例如,以瓦特为单位)随流量(q)的变化。p-q曲线可使用公式1确定:
[0054][0055]
其中k为介于1和n之间的整数指数值,p为离心机120使用的功率,q为流量,h为在流量q下的压头(h),ρ为主体121中的流体的密度,g为重力加速度,并且η为机器120的效率。公式1中q和h的n值来自预先确定的叶轮122速度下的预先确定的性能数据151,该速度对应于估计马达速度(rpm_est)。预先确定的性能数据151也包括效率随流量的变化,并且对应于公式(1)中所用的流量q的效率值从预先确定的性能数据151获得。
[0056]
图6示出了确定p-q曲线604的示例。通过使用公式1确定p的n个值,然后确定p的n个值与q的n个值之间的关系来找到p-q曲线604。该关系可通过任何类型的曲线拟合或数据拟合技术找到。在图6的示例中,离心机120所需的功率(p)随流量(q)线性增加。
[0057]
离心机120使用的马达功率位于确定的p-q曲线上(530)。根据公式2,由马达140提供的功率与马达的扭矩和速度相关:
[0058]
p_motor=扭矩*速度
ꢀꢀꢀ
公式(2)。
[0059]
马达140的估计扭矩(p_est)和马达140的估计速度(rpm_est)从(410)获知。因此,提供给离心机120的功率(p_motor)可根据公式2确定。在确定(p_motor)之后,根据p_q曲线确定对应的操作流量(q_op)。再次参见图6,q_op在水平轴线上示出。
[0060]
确定离心机120的操作点(535)。由于估计马达速度(rpm_est)被确定为对应于m个预先确定的叶轮122速度中的一者,所以预先确定的性能数据151包括针对(rpm_est)压头(h)的值和离心机120的效率的值随流量(q)的变化。因此,可确定在当前流量(q_op)下离心机120的压头(h)和效率。操作点可以是压头(h)和对应的流量(q_op)和/或效率值(η_op)和对应的流量(q_op)。图7示出了使用从包括在预先确定的性能数据151中的效率数据导出的效率曲线来确定操作效率(η_op)。
[0061]
控制器350确定操作效率(η_op)是否可接受(545)。为了确定操作效率(η_op)是否可接受,控制器350将操作效率(η_op)与离心机120的最佳效率点(bep)进行比较。例如,操作效率(η_op)可通过以下方式来与bep进行比较:从bep中减去操作效率(η_op)、确定操作效率(η_op)与bep之间的比率,或者通过确定操作效率(η_op)与bep之间的百分比差值并将结果与效率阈值进行比较。效率阈值可为例如百分比(诸如1%、2%或5%)或值(诸如0.01、0.02或0.05)。效率阈值可存储在电子存储装置374上。效率阈值可由流体管理系统300的操作员例如经由i/o接口376提供,使得阈值可根据应用进行调节。
[0062]
如果与bep比较的结果小于效率阈值,则操作效率(η_op)足够接近bep,并且离心机120的操作效率(η_op)是可接受的。如果操作效率(η_op)是可接受的,则离心机120有效地操作,并且过程500结束或返回到(510)以继续监测离心机120。
[0063]
如果操作效率(η_op)是不可接受的,则控制器350改变马达140的速度(550),使得离心机120的操作效率更接近bep。改变马达140的速度改变了叶轮122的速度和离心机120的操作点。换句话讲,改变马达140的速度改变了操作效率(η_op)。控制器350通过控制逆变器380以改变马达功率信号341的特性(振幅、频率和/或相位)来改变马达140的速度。
[0064]
在控制器350调节马达140之后,在(410)处确定马达140的新的速度(rpm_new)和扭矩(torque_new)。使用相似定律根据新速度(rpm_new)来调节预先确定的性能数据151中的数据(520)。相似定律是压头(h)、效率和叶轮122速度之间的关系。相似定律为:
[0065][0066][0067][0068]
其中下标0表示初始值,q为流量,h为压头,r为叶轮122被驱动的旋转速度,并且p为提供给离心机120的机械功率。在该示例中,r0为(rpm_est),其为马达140在调节之前的速度,并且r为在控制逆变器380以改变马达140的速度之后确定的更新的估计速度(rpm_new)。公式3和4用于确定更新的h-q曲线。相似定律假定即使叶轮122的速度改变,离心机120的效率也保持相同。因此,不更新包括在预先确定的性能数据151中的效率和流量(q)之间的关系。
[0069]
确定更新的p-q曲线(525)。p-q曲线可使用公式1确定,更新的h-q曲线使用相似定律在(520)处确定,并且效率数据在预先确定的性能数据151中确定。另选地,公式5可用于更新在(525)的先前性能中确定的p-q曲线。
[0070]
过程500然后前进至(530)以将离心机120使用的功率定位在更新的估计速度(rpm_new)下。基于公式2确定马达140在更新的估计速度(rpm_new)下提供的功率(p_new)。在确定在更新的速度(p_new)下提供给离心机120的功率之后,根据更新的p_q曲线确定通过在更新的估计速度(rpm_new)下提供功率(p_new)来实现的更新的流量(q_updated)。
[0071]
再次确定操作点(535)。为了确定操作点(根据叶轮122的速度变化),根据使用公式(3)和(4)得出的更新的h-q曲线来确定与更新的流量(q_updated)相关联的压头(h)值。根据包括在预先确定的性能数据151中的效率曲线来确定q_updated处的效率(540)。估计q_updated处的效率以确定其是否可接受(545)。控制器350继续以这种方式执行(520)-(545),直到在(540)处确定的当前操作效率(η_op)是可接受的,或者直到过程500停止(例如,由操作员)。
[0072]
以上讨论涉及其中初始马达速度估计值(rpm_est)对应于m个预先确定的速度中的一者的示例。返回到(515)的讨论,如果马达速度的初始估计值(rpm_est)不对应于m个预先确定的叶轮122速度中的任一者,则过程500在前进到(525)之前从(515)前进到(520)。在(520)处将相似定律应用于预先确定的性能数据151中的h和q值,并且在(525)处使用应用相似定律所得的校正数据来确定p-q曲线。控制器350继续执行(520)-(545)直到在(540)处确定的操作效率(η_op)是可接受的,或者直到过程500停止。
[0073]
图8是离心机120的性能特性曲线的图示。图8包括三条h-q曲线801a、801b、801c(以短虚线样式示出)。曲线801a、801b、801c中的每一者是叶轮122在不同速度下的h-q曲
线。曲线801a用于比曲线801b更大的速度,并且曲线801b用于比曲线801c更大的速度。图8还包括三条效率曲线802a、802b、802c(以长虚线样式示出)。每条曲线802a、802b、802c表示特定效率随流量(q)的变化。效率曲线802a、802b、802c为预先确定的性能数据151的一部分。在图8的示例中,曲线802b用于bep,并且曲线802a和802c用于较低效率。例如,曲线802b可表示70%效率随流量(q)的变化,并且曲线802a和802c可各自表示60%效率随流量(q)的变化。
[0074]
图8还包括系统压头(hsys)曲线803(以实线样式示出)。系统压头(hsys)曲线803是系统压头(hsys)随流量(q)的变化。通过扰动马达140的速度(例如,在过程500的550处)并且然后在(535)处重新计算操作点来确定系统压头(hsys)曲线。在图8所示的示例中,(520)-(550)被执行三次,并且确定了三个操作点804a、804b、804c。操作点804a、804b、804c是系统压头曲线803与h-q曲线802a、802b、802c相交的位置。通过对所确定的操作点804a、804b、804c执行曲线拟合来确定hsys曲线。对于特定叶轮122速度的最佳效率点流量(q_bep)是最高效率曲线(在该示例中为802b)与h-q曲线相交的点处的流量。最佳效率点流量(q_bep)被标记为805a、805b、805c。
[0075]
相对于图9进一步讨论与q_bep相关的示例。图9是过程900的流程图。过程900用于调节马达140的速度以实现离心机120的更有效操作。过程900可由控制器150或控制器350执行。例如,用于实现过程900的机器可读指令可存储在电子存储装置374上并由电子处理模块372执行。相对于流体管理系统300讨论了过程900;然而,过程900可应用于其他流体管理系统。
[0076]
过程900包括(545),其在上文中进行了讨论。如果在(540)处确定的效率是可接受的,则过程900结束。如果在(540)处确定的效率是不可接受的,则控制器350将q_op与q_bep进行比较。q_op为与(535)中确定的操作点相关联的流量(q)。q_bep是对应于叶轮122的速度的最高效率曲线与h-q曲线之间的交点的流量。例如,并且参考图8,如果h_q曲线801b是叶轮122的速度的h-q曲线,则操作点是804b(对应于图8的qop_b)并且bep操作点是805b(对应于图8的qbep_b)。
[0077]
当离心机120以其最高效率操作时,q_op等于q_bep。如果q_op不等于q_bep,则调节马达140的速度以移动q_op更接近或等于q_bep,如下所述。
[0078]
在(947)处,估计q_op以确定q_op是否小于q_bep。如果q_op小于q_bep,则控制器350增加马达140的速度(950_2)。如果q_op小于q_bep,则离心机120的尺寸过大,并且增加流量(q)将使操作点移动得更接近q_bep。因此,通过增加马达140的速度来增加流量。
[0079]
如果q_op大于q_bep(诸如在相对于图8所讨论的示例中),则控制器减小马达140的速度(950_1)。如果q_op大于q_bep,则离心机120的尺寸过小,并且减小流量(q)将使操作点移动得更接近q_bep。因此,通过减小马达140的速度来减小流量。
[0080]
马达140的速度可以在(950_1)处减小或在(950_2)处增加存储在电子存储装置354上的预先确定的恒定量。增加和减小的量可以相同。例如,马达140的速度可以在(950_1)处减小或在(950_2)处增加5转/分钟。在其他实施方式中,马达140的速度增加或减小的量取决于操作条件。例如,马达140的速度增加或减小的量可以是马达140的当前估计速度的固定百分比。
[0081]
在马达140的速度在(950_1)处减小或在(950_2)处增加之后,使用(410)估计马达
140的速度和扭矩。如果马达140的速度在(950_1)处减小,则在(960_1)处再次确定操作点。如果马达140的速度在(9502)处增加,则在(960_2)处确定操作点。元素(960_1)和(960_2)是相同的,并且都实现过程500(图5)的元素(520)-(540)。元素(960_1)和(960_2)在图9中被示出为单独的元素,但是可以被实现为机器可执行指令的单个模块、功能或集合,这些机器可执行指令使用指定速度增加或速度减小的量的输入命令,并且生成作用于逆变器380以相应地调节马达140的输出命令。过程900继续,直到在(545)处所确定的效率被认为是可接受的。
[0082]
图10是过程1000的流程图。过程1000用于使离心机120在有界操作区域内达到峰值效率。有界操作区域可以是用户限定的,并且不一定包括与bep(q_bep)相关联的流量。过程1000可由控制器150或控制器350执行。例如,用于实现过程1000的机器可读指令可存储在电子存储装置374上并由电子处理模块372执行。相对于流体管理系统300讨论了过程1000;然而,过程1000可应用于其他流体管理系统。
[0083]
过程1000包括上文讨论的过程500和900的一些元素。在(545)处估计离心机120的当前操作效率(η_op)的可接受性。如果当前操作效率(η_op)是不可接受的,则在(947)处将当前操作流量(q_op)与和bep(q_bep)相关联的流量进行比较。马达140的速度在(950_1)处减小或在(950_2)处增加,并且离心机120在马达140的新速度下的新操作点分别在(960_1)或(960_2)处确定,如相对于图9所讨论的。
[0084]
首先讨论当前操作流量(q_op)小于q_bep的示例。在(960_2)处确定的更新的操作点包括压头(h)值和对应的流量(q_op)。图11示出了具有压头(h)值和流量(q_op)的操作点的示例。图11还示出了有界操作区域1190、系统压头(hsys)曲线1103、h-q曲线1101b和最大效率曲线1102b。q_bep是效率曲线1102b与hsys曲线1103相交的点。
[0085]
有界操作区域1190是h-q空间中由最大压头(h2)、最小压头(h1)、最小流量(q1)和最大流量(q2)限定的区域。有界操作区域1190包括h1、h2、q1和q2,以及h1和h2之间的压头(h)的所有值,以及q1和q2之间的流量(q)的所有值。可以基于由制造商加载到电子存储装置374上的h1、h2、q1和q2的预先确定的值来限定有界操作区域1190。在一些实施方式中,控制器350的操作员能够通过i/o接口376输入用户限定的h1、h2、q1和q2的值。因此,有界操作区域1190可以是用户限定的,并且因此可以根据最终用户的应用进行定制。
[0086]
过程1000调节马达140的速度,直到离心机120在有界操作区域1190内达到最有效的操作点。将(q_op)和在(960_2)中找到的压头(h)的值与h1、h2、q1和q2进行比较,以确定当前操作点是否在有界操作区域1190内(1065_2)。如果压头(h)在h1和h2之间并且q_op在q1和q2之间,则当前操作点(q_op)在有界操作区域1190中。在图11的示例中,当前操作点(q_op)在有界操作区域1190中。过程1000返回到(545)以确定当前效率(η_op)是否可接受。过程1000继续,直到在操作区域1190内找到可接受的效率。
[0087]
在相对于图11所讨论的示例中,q_bep在有界操作区域1190内。然而,有界操作区域不一定包括q_bep。图12示出了不包括q_bep的另一个有界操作区域1290的示例。在该示例中,当前操作点(q_op)初始小于q_bep,并且马达140的速度增加(950_2)。在马达140的速度增加之后,使用(410)估计马达140的速度和扭矩。在960_2处估计当前操作点(q_op和压头(h))。将当前操作点q_op与q1和q2进行比较,并且将压头(h)与h1和h2进行比较以确定当前操作点是否在有界操作区域1290内。在图12所示的示例中,当前操作点在有界操作区域
1290内。过程1000返回到(545)以将当前流量(q_op)与q_bep进行比较并继续增加马达140的速度,直到在(960_2)处确定的当前操作点在(1065_2)处被确定为在有界操作区域1290之外。然后减小马达140的速度(1068)并确定当前操作点(960_2),直到当前操作点在操作1290的区域内。
[0088]
在该示例中,q_bep不在操作1290的区域内,因此调节马达140的速度,直到q_op等于与点1206相关联的流量。点1206在有界操作区域1290的边界上并且在最接近bep的一侧上。点1206被认为是在有界操作区域1290内,并且过程1000返回到(545)并结束,因为q_op现在是最接近q_bep的,同时也在操作区域1290内。
[0089]
接下来相对于图13和图14讨论当前操作流量(q_op)大于q_bep的示例。在图13的示例中,马达140的速度减小(950_1),以使当前操作点(q_op)更接近q_bep。估计马达140的速度和扭矩(410),并且估计新的操作点(960_1)。如果新操作点在有界操作区域1390内(诸如在图13所示的示例中),则过程1000返回到(545)。过程1000以这种方式继续,直到当前流量(q_op)是可接受的。
[0090]
图14示出了q_bep在有界操作区域1490之外的示例。减小马达140的速度(950_1),并且确定新的操作点(960_1)。操作点不在有界操作区域1490内(1065_1),并且马达140的速度增加(1067)。每当马达140的速度在(1067)处增加时,估计操作点(960_1)。增加马达140的速度,直到操作点流量(q_op)位于有界操作区域1490的边界上的点1406处。点1406是有界操作区域1490中最接近q_bep的流量。过程1000结束,因为已确定有界操作区域1490内的最有效流量。
[0091]
过程500、900和1000的其他实施方式也是可能的。例如,元素(545)在上文中被讨论为对离心机120在当前操作点处的效率的评估。例如,在上面的示例中,将bep和当前操作效率(η_op)之间的差值与阈值进行比较。如果差值的绝对值小于阈值,则认为当前操作效率(η_op)是可接受的。
[0092]
然而,(545)的其他实施方式可用于过程500、900和1000中的任一过程。例如,在一些实施方式中,(545)确定在(540)处确定的当前操作点流量(qop)与预定义的流量(qset)之间的差值的绝对值,并将该差值与阈值(th_q)进行比较。如果差值的绝对值小于阈值(th_q),则认为当前操作点流量是可接受的。以这种方式实现(545)允许使用过程500、900和/或1000将离心机120调节至任何设定的流量点(qset)。此外,在一些实施方式中,电子存储装置374包括用于将用户提供的qset值与关于离心机120的信息进行比较以确保qset的值是可以用离心机120实现的流量的值的指令。
[0093]
为了提供另一个示例,在一些实施方式中,(545)确定在(540)处确定的当前操作压头(h)与预定义或用户提供的压头(hset)值之间的差值的绝对值,并且将该差值与阈值(th_h)进行比较。如果差值的绝对值小于阈值(th_h),则认为当前操作压头(h)是可接受的。以这种方式实现(545)允许使用过程500、900和/或1000将离心机120调节至任何压头(h)值。此外,在一些实施方式中,电子存储装置374包括用于将用户提供的hset值与关于离心机120的信息进行比较以确保hset的值是可以用离心机120实现的压头(h)的值的指令。
[0094]
图15是过程1500的流程图。过程1500用于以变化的速度并且因此以变化的性能度量值来操作离心机120。性能度量的平均值等于该度量的用户请求值。图16是叶轮122或马达140的速度随时间变化的曲线图。图17是离心机120的流量(性能度量)随时间变化的曲线
图。图16和图17具有相同的时间标度。如图16和图17所示,叶轮122的速度和流量随时间而变化。
[0095]
过程1500可由控制器150或控制器350执行。例如,用于实现过程1500的机器可读指令可存储在电子存储装置374上并由电子处理模块372执行。相对于流体管理系统300讨论了过程1500;然而,过程1500可应用于其他流体管理系统。
[0096]
访问度量的设定点值(1510)。设定点值可为例如最终用户使用i/o接口376输入到控制器350中的流量值(qset)。离心机120被控制为以开-关方式操作,使得机器120在开状态和关状态之间重复交替,并且随时间的度量的平均值是设定点值(qset)。该度量在第一时间段期间具有第一值,并且在第二时间段期间具有第二值。当机器120以开-关方式操作时,度量的第二值为0,并且机器120在第二时间段期间关闭。继续其中最终用户希望控制机器120以具有qset的平均流量并且还希望以开-关方式控制机器120的示例,公式(6)示出了q1、t2、t1和qset之间的关系:
[0097][0098]
其中t1为第一有限时间段,t2为第二有限时间段,并且q1为第一时间段t1中开状态期间的流量。例如,q1的值可为q_bep。通过使用q_bep作为q1的值,离心机120在处于开状态时以有效方式操作。最终用户可指定t1或t2的值。在一些实施方式中,最终用户指定除q_bep之外的q1的值。
[0099]
控制离心机120在第一时间段期间以度量的第一值操作(1520)。继续上述示例并参考图16和图17,控制离心机120使得在第一时间段t1期间流量为q1。可使用过程900来控制离心机120,其中(545)被配置为估计当前估计操作点的流量是否等于q1,并且过程900调节马达140的速度直到操作点的流量为q1。
[0100]
控制离心机120在第二时间段期间以度量的第二值操作(1530)。继续上述示例,流量的第二值为0,因为机器120在第二时间段期间关闭。在该示例中,离心机120通过关闭机器120来控制。在其他示例中,度量的第二值为非零,并且使用例如过程900控制机器120来以(520)中讨论的方式在度量的第二值下操作机器120。
[0101]
这些实施方式和其他实施方式在权利要求书的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1