用于泵的双启动系统的制作方法
1.本发明一般涉及泵启动,尤其是离心泵的双启动系统。
背景技术:
2.离心泵是将旋转能(例如,来自泵电机的旋转能)转换为运动流体形式的动能的泵。传统的离心泵要求泵壳在运行前排空气体并充满液体,以便正常工作。因此,离心泵在运行前需要注油系统向离心泵壳体提供流体。
3.通常,离心泵通过正排量泵(例如,电动容积真空泵)充注。在应急服务应用中,如消防车上的泵注油,正排量泵由消防车的电气系统供电。应该理解,在紧急服务应用中,时间是至关重要的,延迟供水可能是灾难性的。因此,这种充注设置的一个缺点是,正排量泵的功率,以及泵的充注效率,受到可从卡车电气系统获得的最大功率的限制。这种启动装置的另一个缺点是,它在运行时通常声音很大,使得口头交流越来越具有挑战性,即使在轻型启动操作中也是如此。
4.因此,制造一种能够产生更大的启动功率从而更快启动的启动系统将是有利的。制造能够在轻负荷启动操作期间在低噪声设置下运行的启动系统将是进一步有利的。
技术实现要素:
5.简要地说,本发明的一个方面涉及一种泵系统,该泵系统包括一个离心泵,该离心泵限定了一个具有入口、出口和真空端口的壳体,其中入口可与一个液体容器流体连接。双启动系统与离心泵的真空端口相连,配置为从离心泵壳体中排出气体,并将液体从贮存器中吸入离心泵壳体。双启动系统包括压缩空气源、正排量泵和文丘里管。所述正排量泵具有入口和出口,所述入口与离心泵的真空端口流体连接。文丘里管具有进气口、排气口和吸入口,进气口可与压缩空气源流体连接,吸入口可与离心泵的真空端口流体连接,并与正排量泵的进气口平行。止回阀位于文丘里管的吸入口的上游,并与正排量泵的进口平行。止回阀定位在关闭位置,基本上防止流体从离心泵的真空端口流向文丘里管的吸入口,并可启动至打开位置,允许流体从离心泵的真空端口流向文丘里管的吸入口。控制阀位于文丘里管进口的上游并与文丘里管进口对齐。控制阀具有与压缩空气源流体连接的入口和与文丘里管进气口流体连接的出口,并且可在关闭位置(基本上从文丘里管流体断开压缩空气源)和打开位置之间启动,将压缩空气源与文丘里管进气口流体连接。双启动系统在第一种模式下运行,其中正排量泵处于非启用状态,文丘里管处于启用状态;第二种模式,其中正排量泵处于启用状态,文丘里管处于启用状态。
6.简要地说,本发明的另一方面涉及一种泵系统,该泵系统包括一个离心泵,该离心泵限定了一个具有入口、出口和真空端口的壳体,其中入口可与一个液体储罐流体连接。双启动系统与离心泵的真空端口相连,配置为从离心泵壳体中排出气体,并将液体从贮存器中吸入离心泵壳体。双启动系统包括压缩空气源、正排量泵和文丘里管。所述正排量泵具有入口和出口,所述入口与离心泵的真空端口流体连接。文丘里管具有进气口、排气口和吸入
口,进气口可与压缩空气源流体连接,吸入口可与离心泵的真空端口流体连接,并与正排量泵的进气口平行。第一止回阀位于文丘里管的吸入口上游并与文丘里管的吸入口对齐,并与正排量泵的进口平行。第一止回阀定位在关闭位置,基本上防止流体从离心泵的真空端口流向文丘里管的吸入端口,并可启动至打开位置,允许流体从离心泵的真空端口流向文丘里管的吸入端口。第二止回阀位于正排量泵进口的上游,并与第一止回阀平行。第二止回阀定位在关闭位置,基本上防止流体从离心泵的真空端口流向正排量泵的进口,并可启动至打开位置,允许流体从离心泵的真空端口流向正排量泵的进口。控制阀位于文丘里管进口的上游并与文丘里管进口对齐。控制阀具有与压缩空气源流体连接的入口和与文丘里管进气口流体连接的出口,并且可在关闭位置(基本上从文丘里管流体断开压缩空气源)和打开位置之间启动,将压缩空气源与文丘里管进气口流体连接。双启动系统在第一种模式下运行,其中正排量泵处于非启用状态,文丘里管处于启用状态;第二种模式,其中正排量泵处于启用状态,文丘里管处于启用状态。
7.简要地说,本发明的另一方面涉及一种为离心泵注油的方法,该离心泵限定了具有入口、出口和真空端口的壳体,该入口可与容纳液体的储液器流体连接。该方法包括将双启动系统与离心泵的真空端口连接的步骤。双启动系统包括压缩空气源、正排量泵和文丘里管。正排量泵具有入口和出口,入口可与离心泵的真空端口流体连接。文丘里管具有进气口、排气口和吸入口,进气口可与压缩空气源流体连接,吸入口可与离心泵的真空端口流体连接,并与正排量泵的进气口平行。第一止回阀位于文丘里管的吸入口的上游并与文丘里管的吸入口对齐,并且与正排量泵的进口平行。第一止回阀位于关闭位置,基本上防止流体从离心泵的真空端口流向文丘里管的吸入口,并可启动至打开位置,允许流体从离心泵的真空端口流向文丘里管的吸入口。第二止回阀位于正排量泵的进口的上游,并与第一止回阀平行。第二止回阀定位在关闭位置,基本上防止流体从离心泵的真空端口流向正排量泵的进口,并可启动至打开位置,允许流体从离心泵的真空端口流向正排量泵的进口。控制阀位于文丘里管进气口的上游并与文丘里管进气口对齐,并且具有与压缩空气源流体连接的入口和与文丘里管进气口流体连接的出口。控制阀可在关闭位置(基本上以流体方式将压缩空气源与文丘里管断开)和打开位置(以流体方式将压缩空气源与文丘里管进气口连接)之间启动。将控制阀驱动至其开启位置,以将压缩空气源与文丘里管进气口流体连接,从而允许压缩空气流入文丘里管的进气口,并进而在吸入口处形成真空。因此,第一止回阀被驱动到其打开位置,以流体方式连接离心泵的真空端口和文丘里管的吸入端口,并依次从离心泵壳体中排出气体。
附图说明
8.当结合附图阅读时,将更好地理解本公开的各方面的以下详细描述。然而,应当理解,本公开不限于所示的精确布置和手段。在附图中:
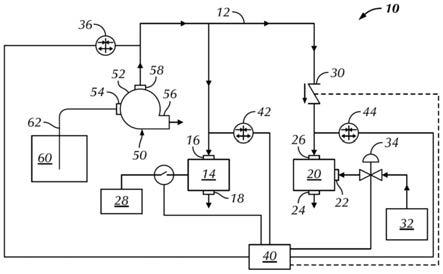
9.图1是根据本公开的实施例的双启动系统的示意图;并且
10.图2是根据本公开的替代实施例的双启动系统的示意图。
具体实施方式
11.在以下描述中使用某些术语只是为了方便而不是为了限制。词语“下部”、“底部”、“上部”和“顶部”表示所参考的附图中的方向。根据本公开,词语“向内”、“向外”、“向上”和“向下”分别是指朝向和远离启动系统的几何中心及其指定部分的方向。除非在此特别说明,否则术语“一”、“一个”和“该”不限于一个元件,而是应理解为“至少一个”。该术语包括上述词语、其派生词以及类似含义的词。
12.还应当理解,当提及本公开的组件的尺寸或特征时,本文使用的术语“大概”、“大约”、“大致”、“基本上”和类似术语表明所描述的尺寸/特性不是严格的边界或参数,也不排除功能相似的微小变化。至少,包括数值参数的此类参考将包括使用本领域中接受的数学和工业原理(例如,舍入、测量值或其他系统误差、制造公差等)不会改变最低有效数字的变化。
13.详细参考附图,其中相同的标号始终表示相同的元件,图1中示出了根据本公开的实施例的诸如在汽车消防设备(例如消防车)上的用于离心泵50的双启动系统10的示意图。应当理解,离心泵50限定具有入口54、出口56和真空端口58的壳体52。入口54以本领域普通技术人员熟知的方式例如通过管线、软管等形式的至少一个进气口62(见例如图2中的经由歧管64连接到泵50的两个进气口62)与容纳液体的储液器60流体连接。储液器60内的液体(例如水)可以是静态的。
14.双启动系统10通过真空导管12与离心泵50的真空端口58连接,并被配置为从离心泵壳体52排出气体并将液体从储液器60吸入离心泵壳体52。如图1所示,双启动系统10包括正排量泵14和与离心泵50的真空端口58彼此并联地流体连接的文丘里管20。在一种配置中,正排量泵14可以采用电动旋转叶片式正排量泵的形式,例如但不限于由希尔产品公司(hale products inc)出售的型号esp泵。可替代地,例如,正排量泵14可以以本领域普通技术人员熟知的方式由离心泵50的离合器驱动器(未示出)或离心泵50的齿轮箱(未示出)驱动。正排量泵14的优点之一是产生相对强的吸力/真空。然而,正排量泵14从电源汲取大约275至300安培的电流以产生这种吸力。虽然产生的吸力/真空不如正排量泵14多,但文丘里管20的一个优点是它使用单独的能源并且比正排量泵14运行时更安静。
15.以本领域普通技术人员熟知的方式操作的正排量泵14包括吸入口端口16、排出口18及它们之间的转子(未示出)。入口16通过真空导管12与离心泵50的真空端口58流体连接。没有正排量泵14的操作,真空端口58内的流体基本上被阻止从排放端口18流出。电源28可电连接到正排量泵14以将其启用。例如,但不限于,电源28可以采用以本领域普通技术人员熟知的方式可电连接到正排量泵14的车辆电池的形式,例如消防车的电池的形式。
16.以本领域普通技术人员熟知的方式操作的文丘里管20还包括以普通技术人员熟知的方式流体连接的入口端口22、出口端口24和吸入端口26。吸入端口26可通过真空导管12与离心泵50的真空端口58流体连接,并与正排量泵14的入口端口16平行。止回阀30定位在上游,并与文丘里管20的吸入端口26对齐。如图1所示,止回阀30与正排量泵14的入口端口16平行地定位。也就是说,止回阀30定位成将文丘里管20与离心泵50的真空端口58流体连接或断开,而不影响正排量泵14与离心泵50的真空端口58的连通性。在一种配置中,止回阀30可以采用被偏置到关闭位置的压力操作止回阀的形式(例如弹簧偏置止回阀),从而基本上防止流体从离心泵50的真空口58流到文丘里管20的吸入端口26,当止回阀30两端的压差超过其开启压力时可致动到打开位置(如下文将进一步详细描述的),并允许流体从离心泵50的真空口58流到文丘里管20的吸入端口26。可替代地,止回阀30可以采用可独立于阀
30两端的压差在打开和关闭位置之间致动的电磁阀的形式。在使用电磁阀30的情况下,电磁阀30与控制器40(如下文将进一步详细描述的)电连接。
17.文丘里管20的入口端口22可与动力流体源流体连接,例如与压缩空气源(例如储液器)32流体连接。例如,但不限于,在紧急服务应用中,例如启动消防车上的离心泵50,压缩空气源32可以发源于消防车的空气制动系统。控制阀34定位在文丘里入口端口22的上游并与文丘里入口端口22成一直线,并且在入口侧与压缩空气源32流体连接并且在出口侧与文丘里入口端口22流体连接。在一种配置中,控制阀34可采用电磁阀的形式,但本公开不限于此。例如,控制阀34可替代地或附加地采用可手动致动的控制阀的形式,但不限于此。控制阀34可在关闭位置(将压缩空气源32与文丘里入口端口22基本上流体地断开)与打开位置(将压缩空气源32与文丘里入口端口22流体连接)之间致动。
18.控制器40以本领域普通技术人员熟知的方式可操作地连接到双启动系统10的某些组件(如下文将进一步详细描述)以实现启用/停用相应的组件。控制器40可以采用当前已知或以后已知的任何合适的控制器的形式,诸如,例如微处理器、多处理器等,但不限于此。控制器40可包括或可操作地(有线或无线)联接到用于向控制器40发送命令的用户界面(未示出)。用户界面可采用硬件、软件或其组合的形式,用于用户选择双启动机构10的期望操作。例如,用户界面可以采用具有数字输入键(未示出)的触摸屏和具有物理输入键(未显示)的控制面板中的至少一种的形式,但不限于此。控制器40还可包括或可操作地联接到存储器(未示出),该存储器存储用于执行双启动系统10的选定操作的代码或软件。存储器可采用任何已知的、未知的形式或其他合适的存储设备,诸如只读存储器(rom)等。
19.双启动系统10被配置成以第一“低负载”模式操作,其中正排量泵14不被启用而文丘里管20被启用,或以第二“高负载”模式操作,其中正排量泵14泵14和文丘里管20被启用以产生更强的吸力。有利地,双启动系统10在其第一模式下(即在轻型启动操作期间)具有更安静的操作能力,诸如例如当储液器60在离心泵50附近时和/或当低储液器60和离心泵50之间存在较低的垂直升程时。更有利的是,双启动系统10在其第二模式下(即在重型启动操作期间)具有产生更大启动功率(与单独使用正排量泵14相比)的能力,例如当储液器60离离心泵50较远时和/或当储液器60和离心泵50之间存在更大的垂直升程时。在一种配置中,处于其第二模式的双启动系统10的操作可以比单独使用正排量泵14的启动快大约一倍半,但不限于此。双启动系统10还被配置为根据需要在操作模式之间切换。例如,双启动系统10可以最初在其第二模式下操作,然后在系统标称启动后的预定间隔内切换到第一模式。可选地,双启动系统10还可以被配置为以第三模式操作,其中正排量泵14被启用而文丘里管20不被启用。
20.控制器40被配置为根据双启动系统10遇到的启动负载选择最佳操作模式。多个因素单独或组合地可用于控制器40来评估低负载或高负载状况。例如,双启动系统10可以包括传感器36,该传感器36定位在离心泵50的入口54附近(或者替代地,定位在真空端口58附近),并且与控制器40可操作地连接并且被配置为将离心泵50的入口54处的真空水平的测量值连续地或以预定间隔(例如每1、2或5秒)传送到控制器40。在一种配置中,传感器36可以采用复合真空和压力传感器的形式,但不限于此。可选地,双启动系统10还可以包括与控制器40可操作地连接的靠近正排量泵14的吸入口端口16的传感器42和靠近文丘里管20的吸入端口26的传感器44中的至少一个,以将额外的真空水平的测量值传输到控制器40。
21.控制器40可以被编程为以阈值真空水平或高于阈值真空水平在第一模式下操作并且以阈值真空水平或低于阈值真空水平在第二模式下操作。附加地或替代地,控制器40可以被编程为以真空产生的阈值速率或高于该阈值速率在第一模式下操作并且以真空产生的阈值速率或低于该阈值速率时在第二模式下操作。阈值真空水平和真空产生的阈值速率是根据启动装置的操作特性预先确定的。作为一个非限制性示例,如果真空水平在预定时间间隔内(例如,在第一模式下操作5或10秒)没有增加2inhg,则控制器40可以将双启动系统10切换到其第二模式。进一步附加地或替代地,控制器40可以被编程为根据被启动的进气口62的数量、尺寸和位置、泵14的尺寸(内部容积)或其组合在第一模式或第二模式下操作。
22.本领域普通技术人员应当理解,使用的进气口62越少,进气口62的尺寸越小,或者储液器60离泵50越近,从而需要的进气口62越短,双启动系统10的负载越少,即排出的气体越少。进气口62可增加需要由双灌系统10排出的显着容积,这对于泵50的每次部署可能是不同的。在储液器60离离心泵50更远的应用中,需要更长或更多的进气口62,控制器40可以启用正排量泵14和文丘里管20以与负载匹配,即,双灌系统10可以如下所述在第二种模式下运行。在某些应用中,诸如由公司制造的那些便携式折叠罐(未示出)可以靠近离心泵50放置,缩短罐和泵50之间的进气口62,并且与可能远离泵50的天然静态水源(例如池塘)相比减少启动负载,从而需要更长的进水口62或多个进水口62。在较低负载或较少气体排出的情况下,所需的真空将更快地产生。控制器40还可以包括可通过用户界面选择的手动模式或手动超驰模式,其中用户可以手动选择双启动系统10的操作模式。
23.在操作中,双启动系统10可以例如根据用户指定的设置最初以第一模式或第二模式提供动力。在第一模式下,控制器40将控制阀34(可操作地与其连接)致动到其打开位置,从而允许来自压缩空气源32的压缩空气经由入口端口22流入文丘里管20,进而在吸入端口26处产生真空。在采用压力操作止回阀30的情况下,一旦止回阀30两端的压差大于其开启压力,止回阀30就被致动到其打开位置。在采用可操作地连接到控制器40的电磁型止回阀30的情况下,控制器40还将止回阀30致动到其打开位置。文丘里管20的吸入端口26由此经由真空导管12与离心泵50的真空端口58流体连接以从离心泵壳体52吸入和排出气体并将液体从储液器60吸入到离心泵壳体52中。
24.在第二模式下,控制器40还将电源28与正排量泵14连接(以本领域普通技术人员熟知的方式,例如,通过启用开关)以启用泵14。泵14的操作与文丘里管20平行地从离心泵壳体52吸入和排出气体,从而导致更大和更快的启动。当从第二模式切换到第一模式时,控制器40将电源28与正排量泵14断开。为了关闭文丘里管20,控制器40将控制阀34致动到其关闭位置。本领域的普通技术人员应当理解,双启动系统10可替代地最初以第三模式操作,然后切换到第一模式或第二模式。
25.可选地,如图2所示,双启动系统10还可以包括第二止回阀38,该第二止回阀38位于正排量泵14的吸入口端口16的上游并与该吸入口端口16对齐。止回阀38与止回阀30平行地定位。与止回阀30类似,止回阀38定位成将正排量泵14与离心泵50的真空端口58流体连接或将正排量泵14与离心泵50的真空端口58断开。在一种配置中,止回阀38可以采用被偏置到关闭位置的压力操作止回阀的形式(例如弹簧偏置止回阀等),从而基本上防止流体从离心泵50的真空端口58流到正排量泵14的吸入口端口16,当止回阀38两端的压差超过其开
启压力时可致动到打开位置,并允许流体从离心泵50的真空端口58流到正排量泵14的吸入口端口16。可替代地,止回阀38可以采用可独立于阀38两端的压差而在打开和关闭位置之间致动的电磁阀的形式。
26.在操作中,并且在采用压力操作止回阀38的情况下,当控制器40将动力源28与正排量泵14连接以启用泵14时,止回阀38被致动到其打开位置,进而泵14在止回阀38两端产生大于其开启压力的压差。在采用(可操作地连接到控制器40的)电磁式止回阀38的情况下,除了将电源28与正排量泵14连接以启用泵14之外,控制器40还将止回阀38致动到其打开位置。正排量泵14的吸入口端口16由此经由真空导管12与离心泵50的真空端口58流体连接以从离心泵壳体52吸入和排出气体并将液体从储液器60吸入离心泵壳体52中。
27.本领域技术人员将理解,可以在不脱离其广泛的发明构思的情况下对上述实施例进行改变。因此,应当理解,本发明不限于所公开的特定实施例,而是旨在涵盖在本公开的精神和范围内的修改,如所附权利要求中所述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1