摇头机构的控制方法、装置、设备及存储介质与流程
本发明涉及电器设备,特别涉及一种摇头机构的控制方法、装置、设备及存储介质。
背景技术:
1、电风扇摇头方式可分为机械式和电动式。机械式是主电机(带动扇叶旋转的电机)带动电风扇头一起左右摇动。电动式是额外用一个微型电机带动电风扇头左右摇动。
2、这两种方式能实现的摇头角度都是固定的。在摇头过程中如果碰到了障碍物,摇头机构会发生堵转现象。现有技术中当电风扇发生堵转现象时,不能修正摇头角度,仍然按照预设的角度区间继续运行,会产生较大的噪音,严重时将损坏摇头机构或者电机。
技术实现思路
1、本公开实施例提供了一种摇头机构的控制方法、装置、设备及存储介质,当设备的摇头机构在摇头过程中发生堵转现象时,可以根据预设的堵转条件,判断是否遇到了固定障碍物,若遇到了固定障碍物,则控制设备自动纠正摇头的边界角度,避免摇头机构持续碰撞障碍物。
2、第一方面,本公开实施例提供了一种摇头机构的控制方法,包括:
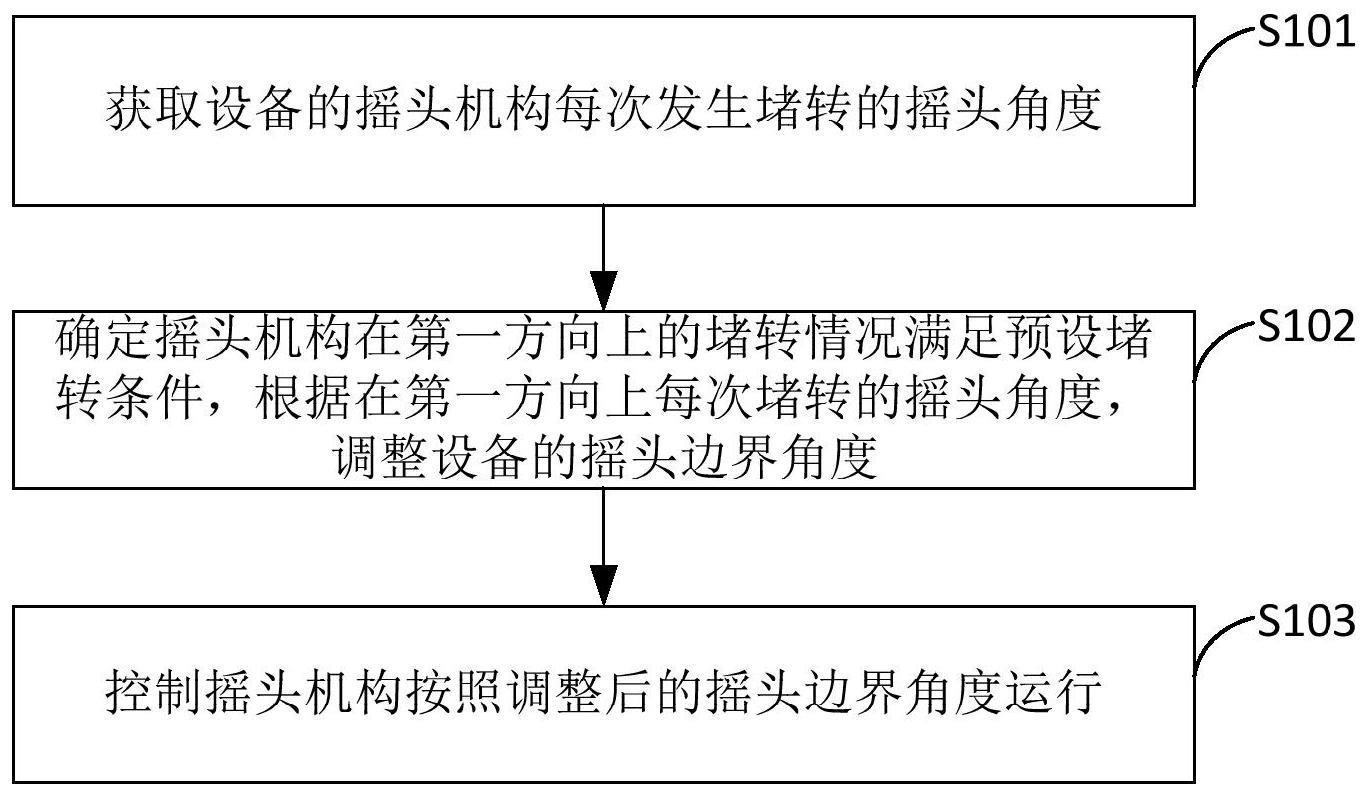
3、获取设备的摇头机构每次发生堵转的摇头角度;
4、确定摇头机构在第一方向上的堵转情况满足预设堵转条件,根据在第一方向上每次堵转的摇头角度,调整所述设备的摇头边界角度;
5、控制摇头机构按照调整后的摇头边界角度运行。
6、在一个可选地实施例中,确定摇头机构在第一方向上的堵转情况满足预设堵转条件,根据在第一方向上每次堵转的摇头角度,调整所述设备的摇头边界角度,包括:
7、确定摇头机构在第一方向发生堵转的次数达到预设次数,根据在第一方向上每次堵转的摇头角度,计算在第一方向上堵转的摇头角度的差值平均值;
8、确定差值平均值小于预设阈值,根据在第一方向上每次堵转的摇头角度,调整所述设备的摇头边界角度。
9、在一个可选地实施例中,根据在第一方向上每次堵转的摇头角度,调整所述设备的摇头边界角度,包括:
10、获取在第一方向上每次堵转的最小摇头角度;
11、将最小摇头角度减去预设修正角度,得到调整后的第一方向的摇头边界角度。
12、在一个可选地实施例中,还包括:
13、根据调整后的第一方向的摇头边界角度以及预设的摇头角度区间,对第二方向的摇头边界角度进行调整,第二方向与第一方向相反。
14、在一个可选地实施例中,根据调整后的第一方向的摇头边界角度以及预设的摇头角度区间,对第二方向的摇头边界角度进行调整,包括:
15、确定预设的摇头角度区间对应的摇头范围角度;
16、将摇头范围角度减去调整后的第一方向的摇头边界角度,得到调整后的第二方向的摇头边界角度。
17、在一个可选地实施例中,还包括:
18、确定摇头机构在第一方向发生堵转且当前不满足预设堵转条件,控制摇头机构向第二方向摇头,第二方向与第一方向相反。
19、在一个可选地实施例中,获取设备的摇头机构每次发生堵转的摇头角度之前,还包括:
20、获取摇头机构对应的电机的单相电流值以及双相电流值;
21、根据单相电流值小于等于预设的单相堵转电流值,确定摇头机构发生堵转;或者,
22、根据双相电流值小于等于预设的双相堵转电流值,确定摇头机构发生堵转。
23、在一个可选地实施例中,所述设备包括风扇或暖风机。
24、第二方面,本公开实施例提供了一种摇头机构的控制装置,包括:
25、获取模块,用于获取设备的摇头机构每次发生堵转的摇头角度;
26、调整模块,用于确定摇头机构在第一方向上的堵转情况满足预设堵转条件,根据在第一方向上每次堵转的摇头角度,调整所述设备的摇头边界角度;
27、控制模块,用于控制摇头机构按照调整后的摇头边界角度运行。
28、第三方面,本公开实施例提供了一种电子设备,包括处理器和存储有程序指令的存储器,处理器被配置为在执行程序指令时,执行上述实施例提供的一种摇头机构的控制方法。
29、第四方面,本公开实施例提供了一种计算机可读介质,其上存储有计算机可读指令,计算机可读指令可被处理器执行以实现上述实施例提供的一种摇头机构的控制方法。
30、本公开实施例提供的技术方案可以包括以下有益效果:
31、根据本公开实施例提供的摇头机构的控制方法,当设备在摇头过程中发生堵转现象时,可以根据预设的堵转条件,判断设备是否遇到了固定障碍物,若设备遇到了固定障碍物,则控制设备自动纠正摇头的边界角度,避免设备的摇头机构持续碰撞障碍物,从而大大提升了设备的智能化水平以及用户的体验度。
32、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种摇头机构的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,确定所述摇头机构在第一方向上的堵转情况满足预设堵转条件,根据在所述第一方向上每次堵转的摇头角度,调整所述设备的摇头边界角度,包括:
3.根据权利要求1或2所述的方法,其特征在于,根据在所述第一方向上每次堵转的摇头角度,调整所述设备的摇头边界角度,包括:
4.根据权利要求3所述的方法,其特征在于,还包括:
5.根据权利要求4所述的方法,其特征在于,根据所述调整后的第一方向的摇头边界角度以及预设的摇头角度区间,对第二方向的摇头边界角度进行调整,包括:
6.根据权利要求1或2所述的方法,其特征在于,还包括:
7.根据权利要求1所述的方法,其特征在于,获取设备的摇头机构每次发生堵转的摇头角度之前,还包括:
8.根据权利要求1所述的方法,其特征在于,所述设备包括风扇或暖风机。
9.一种摇头机构的控制装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括处理器和存储有程序指令的存储器,所述处理器被配置为在执行所述程序指令时,执行如权利要求1至8任一项所述的一种摇头机构的控制方法。
11.一种计算机可读介质,其特征在于,其上存储有计算机可读指令,所述计算机可读指令可被处理器执行以实现如权利要求1至8任一项所述的一种摇头机构的控制方法。
技术总结
本发明公开了一种摇头机构的控制方法、装置、设备及存储介质,所述方法包括:获取设备的摇头机构每次发生堵转的摇头角度;确定所述摇头机构在第一方向上的堵转情况满足预设堵转条件,根据在所述第一方向上每次堵转的摇头角度,调整设备的摇头边界角度;控制所述摇头机构按照调整后的摇头边界角度运行。根据本申请实施例提供的摇头机构的控制方法,当设备在摇头过程中碰到障碍物时,可以自动调整摇头的边界角度,避免设备的摇头机构持续碰撞障碍物,大大提升了设备的智能化水平以及用户的体验度。
技术研发人员:郭新生,崔世强,张壮遥,付志冈,王彪,邹丁山,王润发
受保护的技术使用者:广东美的环境电器制造有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!