一种机泵设备状态监测动态阈值预警方法与流程
1.本发明属于设备状态监测应用技术领域,涉及一种机泵设备状态监测动态阈值预警方法。
背景技术:
2.机泵设备广泛运用于流程工业中,其安全、稳定、长周期地运行能够为企业带来良好的经济效益和社会效益,因此,实现机泵设备早期故障预警至关重要。目前机泵设备的状态监测常规预警方式发出报警时,实际设备健康状况已经恶化到一定程度,本方法与常规报警方式相比,属于机械智能预警的范畴,可以在缓变故障发生的早期就发出预警,实现了机泵缓慢变化故障的早期预警,弥补常规报警方式在机泵缓变故障预警上的不足。
技术实现要素:
3.本发明目的在于提供一种机泵设备状态监测动态阈值预警方法,基于物联网在线监测系统,对设备监测趋势数据进行统计分析,并提出一种趋势滤波与自学习预警阈值,曲线斜率变化的故障预警模型相结合的机械故障早期预警方法。
4.本发明采用如下技术方案:
5.一种机泵设备状态监测动态阈值预警方法,利用趋势滤波技术对实时采集到的机泵设备的振动特征信号进行滤波处理,根据滤波处理后的振动特征信号得到动态阈值报警区间及振动曲线斜率,当两者均分别超过自学习阈值范围和正常振动趋势斜率时,设备进行故障报警,具体步骤如下:
6.step1:选取机泵设备平稳运行且正常状态下的正常趋势数据以及机泵设备振动特征信号实时趋势数据;
7.选取机泵设备正常工况状态的监测数据x(t)为参考数据,提取设备振动特征信号实时监测数据y(t),并对两者进行计算分别得出设备平稳运行t秒的正常趋势数据x(n)和实时趋势数据y(n),x(n)={x1,x2,
…
,xn},y(n)={y1,y2,
…
,yn},其中n=fs
·
t,fs为采样频率,n为采样点数,xn为第n个采样点对应的正常监测数据,yn第n个采样点对应的实时监测数据。
8.step2:对正常趋势数据进行滤波预处理,得到正常趋势数据的振动特征曲线并计算斜率,选取某点的斜率kio作为参考斜率;
9.求取正常趋势数据的振动特征曲线上各点的导数值,并选取正常运行状态下的某一点io,使该点处的导数值kio作为参考数值,作为斜率判断的参考标准。
10.step3:对正常趋势数据进行归一化处理并计算监测参数趋势数据比值函数jhdiv,得到自学习预警阈值区间;
11.按照不同设备的不同运行工况,预先设定故障比值参数x,针对不同故障点将故障发生部件特征频率与设备实际运行振动速度有效值利用比值函数jhdiv进行比值计算,根据计算出的结果与故障报警裕度值x进行对比,当比值计算结果大于故障报警裕度值x且实
时振动值超过标准即达到故障等级,则形成故障自学习阈值区间。x的取值根据以往设备的故障案例监测数据训练得出,不同故障机理等级、不同的监测参数所对应的故障比值参数x也不相同。故障等级为烈度级,分别为4.50、7.10、对应区间分别为2.8-4.5mm/s,4.5-7.1mm/s,7.1-1.12mm/s,1.12-1.8mm/s。故障自学习阈值区间分为正常阈值区间、轻微故障阈值区间、较严重故障阈值区间和严重故障阈值区间。
12.step4:利用振动趋势滤波方法对实时趋势数据进行趋势滤波得到实时滤波趋势和实时趋势数据的振动特征曲线,同时取其振动特征曲线上任一点导数值ki;
13.step5:若实时滤波趋势不在自学习预警阈值区间内且以及ki≥m.kio,则设备发出故障报警,反之则不发出故障报警,其中,m为调整参数。参考点导数值kio越趋近于0,调整参数m需要越大;参考点导数值越远离0,调整参数m需要越小。
14.有益效果:本发明通过对机泵实时振动信号得到的实时振动趋势曲线进行滤波处理,并分别与实验得出的设备运行振动趋势曲线阈值自学习预警区间和实时振动趋势曲线斜率进行对比,从而达到机泵设备早期故障预警的目的,降低故障误报警的频次,提高系统故障报警的准确度。
附图说明
15.图1:本发明方法原理图;
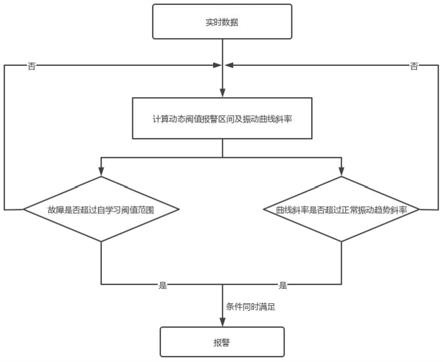
16.图2:本发明方法动态阈值预警流程图;
17.图3:本发明故障自学习流程图;
18.图4:实施例2中机泵设备状态监测动态阈值预警逻辑判断图。
具体实施方式
19.为使本发明目的、技术方案更清楚,下面结合附图和具体实施例对本发明做进一步的详细说明和解释。
20.实施例1:一种机泵设备状态监测动态阈值预警方法,如图1所示,主要利用趋势滤波技术对实时采集到的机泵设备的振动特征信号进行滤波处理,根据滤波处理后的振动特征信号得到动态阈值报警区间及振动曲线斜率,当两者均分别超过自学习阈值范围和正常振动趋势斜率时,设备进行故障报警,具体步骤如图2所示:
21.step1:选取机泵设备平稳运行且正常状态下的正常趋势数据以及机泵设备振动特征信号实时趋势数据;
22.选取机泵设备正常工况状态的监测数据x(t)为参考数据,提取设备振动特征信号实时监测数据y(t),并对两者进行计算分别得出设备平稳运行t秒的正常趋势数据x(n)和实时趋势数据y(n),x(n)={x1,x2,
…
,xn},y(n)={y1,y2,
…
,yn},其中n=fs
·
t,fs为采样频率,n为采样点数,xn为第n个采样点对应的正常监测数据,yn第n个采样点对应的实时监测数据。
23.step2:对正常趋势数据进行滤波预处理,得到正常趋势数据的振动特征曲线并计算斜率,选取某点的斜率kio作为参考斜率;
24.求取正常趋势数据的振动特征曲线上各点的导数值,并选取正常运行状态下的某一点io,使该点处的导数值kio作为参考数值,作为斜率判断的参考标准。
25.step3:对正常趋势数据进行归一化处理并计算监测参数趋势数据比值函数jhdiv,得到自学习预警阈值区间,如图3所示;
26.按照不同设备的不同运行工况,预先设定故障比值参数x,针对不同故障点将故障发生部件特征频率与设备实际运行振动速度有效值利用比值函数jhdiv进行比值计算,根据计算出的结果与故障报警裕度值x进行对比,当比值计算结果大于故障报警裕度值x且实时振动值超过标准即达到故障等级,则形成故障自学习阈值区间。x的取值根据以往设备的故障案例监测数据训练得出,不同故障机理等级、不同的监测参数所对应的故障比值参数x也不相同。故障等级为烈度级,分别为4.50、7.10、对应区间分别为2.8-4.5mm/s,4.5-7.1mm/s,7.1-1.12mm/s,1.12-1.8mm/s。故障自学习阈值区间分为正常阈值区间、轻微故障阈值区间、较严重故障阈值区间和严重故障阈值区间。
27.故障比值参数x、报警阈值区间可通过自诊断系统进行动态学习控制,实现阈值区间与斜率共同作用来对实时振动趋势曲线进行动态阈值自适应控制,不再单一的依靠人为设定的数值进行阈值判断,而是通过设备运行过程中的数据分析和故障发生频率不断地对系统进行规则自修正,自适应。
28.step4:仅通过自学习阈值可能会遗漏故障暂未达到阈值,但振动特征值曲线故障趋势明显的情况。根据趋势滤波处理后的平滑机泵真实振动趋势曲线,按照振动趋势曲线求导公式求取曲线上各点的导数值,预先设定曲线斜率调整参数m,并选取正常工况运行下的某一点作为参考点进行实际曲线斜率的安全裕度计算。利用振动趋势滤波方法对实时趋势数据进行趋势滤波得到实时滤波趋势和实时趋势数据的振动特征曲线,同时取其振动特征曲线上任一点导数值ki;
29.step5:若实时滤波趋势不在自学习预警阈值区间内且以及ki≥m.kio,则设备发出故障报警,反之则不发出故障报警,其中,m为调整参数。参考点导数值kio越趋近于0,调整参数m需要越大;参考点导数值越远离0,调整参数m需要越小。
30.实施例2:本实施例以某企业硫酸车间为例,车间内的浆液循环泵的常规报警烈度值为7.1mm/s、11.2mm/s,符合标准振动报警值,但实际设备由于弹性基础,导致设备本身整体振动偏大,但设备本身运行正常,因此将监测报警阈值做了适当的调整,将故障报警的阈值设定到11.2mm/s才进行报警。2018年三月底该设备某测点监测趋势出现缓慢爬升,在此之前振动烈度基本稳定在8.5mm/s附近,到四月中旬振动烈度值接近11.2mm/s,监测趋势中出现很明显的突增,但烈度值并未达到既定的设备严重故障的阈值区间,系统并未报警,导致故障已经恶化到一定程度。虽并未导致设备非计划停机检修,但增加了日常维修的成本。
31.本实施例中采用如图4所示的动态阈值预警方法,通过长时间的设备运行数据采集,大数据分析,动态自学习阈值预警方法会首先判断出设备正常运行状态下的趋势,并给出设备正常运行状态下的正常阈值区间。
32.根据自学习预警阈值算法结合故障出现的特征,当某一测点振动烈度超出正常阈值区间后开始分析其是否出现某一故障特有频率及其故障频率占比是否超过不同故障等级所对应的故障报警裕度值x,结合趋势曲线导数安全裕度计算,同时满足后计算出其自学习预警阈值区间,并将设备的故障等级进行划分(轻微故障:故障可不作处理/较严重故障:建议停机检修/严重故障:必须停机检修)。由于设备的实际运行情况较复杂,必须考虑到偶发性的振动大、斜率突发性超过正常趋势斜率、预警方法未能分析出的故障原因等因素导
致的某一时刻点振动大的情况,将此类特殊情况列为待观察故障,后续设备运行过程中重复出现,提前进行故障报警,待人工排查故障原因。
33.常规的基于阈值的特征参数报警,无法精确判断设备的实际运行状况,所以当常规报警方式发生报警时,设备的实际情况已经恶化到一定程度。与常规的报警方式相比,此方法能够根据设备长时间的大数据分析,计算出与设备实际运行状况相匹配的故障自学习阈值区间,实现设备在缓慢变化故障的早期预警。
34.应该理解,上述实施例的描述只是示例性的,而并非要限制本发明的范围。在本领域普通技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下作出各种变化均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1