一种基于广义动量观测法的泵类故障检测方法与流程
1.本发明涉及一种故障检测技术,特别涉及一种基于广义动量观测法的泵类故障检测方法。
背景技术:
2.泵类设备作为一种能量转化设备,承担着输送流体或使流体增压的大部分工作,在社会各行各业中用途非常广泛,而泵类设备一旦发生故障,轻则渗液漏液,重则损坏整个系统给生产活动带来巨大损失,然而很多泵类设备的工作场景较为恶劣不适合人类长期值守,因此能自动进行故障检测的泵逐渐应运而生。
3.传统泵类设备需要具有故障检测等功能,需要在泵类设计阶段就将相应功能考虑进去,对泵类设备的结构进行特殊调整以满足传感器等感知设备的安装需求,此外泵类故障检测多通过采集振动信号,但引起振动的原因复杂,与故障之间的对应关系并不十分明确。
技术实现要素:
4.针对依赖于传感器技术的泵类故障检测存在的问题,提出了一种基于广义动量观测法的泵类故障检测方法,从能量观测器的角度出发,在无需外加特殊传感器的基础上,通过广义动量观测器实现对故障信息检测。
5.本发明的技术方案为:一种基于广义动量观测法的泵类故障检测方法,具体包括如下步骤:
6.1)系统中驱动电机通过传动装置将驱动力传递给各个泵,根据实际系统构建电机、泵联合系统动力学模型,并辨识动力学参数;
7.2)基于上述动力学模型构建广义动量观测器:引入故障外力矩项,将动力学方程与广义动量观测器对应建立广义动量观测器,广义动量观测器中外力矩的观测量对应动力学方程中的故障外力矩项,p为期望广义动量p,为观测广义动量,即实际检测动量,k0为增益矩阵;
8.3)在步骤2)基础上模拟各种故障,推导增益矩阵k0对于观测器输出与故障外力矩项对应关系的影响;
9.4)不同的故障情况会产生不同的故障外力矩,通过步骤3)获得的观测器输出表征故障力矩τ
ext
,设置不同的触发阈值,实现对于不同故障的识别。
10.进一步,所述步骤1)中系统动力学模型使用拉格朗日法建立,电机与泵的拉格朗日函数在广义坐标中定义如下:
11.l=t-u
12.其中t、l、u代表系统的总动能、拉格朗日算子、总势能;
13.将动能表达式与势能表达式带入到拉格朗日算子得电机与泵动力学方程:
14.上式中,h为惯性矩阵,c为离心力和科氏力矩阵,g为重力项,τ为驱动力矩,为静态和动摩擦矩阵,τd为误差以及外界干扰所引起的不确定项。
15.进一步,所述步骤2)中完全表征额外的故障力矩,即通过动量差实现对于故障力矩的监测,而动量仅需得到系统动力学模型中得到的惯性矩阵与速度信息,通过电机电流信息得到输出力矩的变化情况,实现对广义动量观测法的验证。
16.进一步,所述步骤3)中增益矩阵k0推导相当于一阶系统,采用不同的k0进行多组实验,从延时和误差两方面综合考虑,选取合适的增益矩阵k0。
17.本发明的有益效果在于:本发明基于广义动量观测法的泵类故障检测方法,无需改变泵类设备原来结构,且无需添加额外的振动传感器、扭矩传感器等,仅需要对工作过程中非常容易得到的电机电流、转速等信息进行采集即可实现设备故障检测,并且通过调整增益矩阵还可以改变故障检测的灵敏程度,对于离心泵轴承松动、转子摩擦等典型故障实现良好辨识。
附图说明
18.图1为本发明实施的场景示意图;
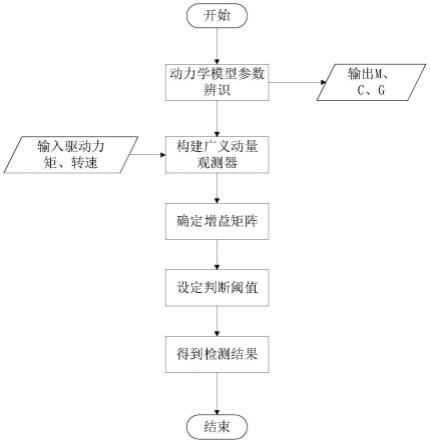
19.图2为本发明提供的一种基于广义动量观测法的泵类故障检测方法的流程图;
20.图3为本发明实施中电机泵设备转速控制仿真模型图;
21.图4为本发明基于广义动量的故障观测系统结构图;
22.图5为本发明轴上故障与观测器观测结果图。
具体实施方式
23.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
24.本发明基于广义动量观测法的泵类故障检测方法,首先,使用拉格朗日法对一种电动机驱动典型离心泵系统进行动力学建模,然后在动力学模型基础上建立广义动量观测器,确定增益矩阵,最后通过观测到的广义动量对泵类设备的故障进行辨识。
25.众所周知,物体的运动与力的作用密不可分,如图1所示实施的场景示意图,通过左侧的驱动电动机通过传动装置将驱动力传递给各个泵,构成电动机多联轴驱动泵系统,电动机与泵动力学模型正是描述了不同速度下泵轴的受力情况。由于泵类发生故障会导致轴上力矩发生非正常变化,通过对电机与泵动力学模型的建模,可以从更深层次出发,将泵类故障与轴上非正常力矩变化联系起来,通过广义动量观测法对系统广义动量进行观测,通过广义动量观测结果实现泵类故障检测。
26.另一种情况,电动机通过传动装置,同时驱动一大一小两个泵设备,由于两个泵处于不同的液体回路,工作工况复杂多变,极易产生密封松动、气蚀等故障,针对这些问题,通过动量观测器实现对于动量突变的观测,从而实现不同类型的故障检测。
27.如图2所示基于广义动量观测法的泵类故障检测方法的流程图,具体包括如下步
骤:
28.步骤s1:构建电机、泵联合系统动力学模型,并辨识动力学参数;
29.本发明使用拉格朗日法建立电机与泵动力学方程。电机与泵的拉格朗日函数(lagrangian)可以在广义坐标中定义如下:
30.l=t-u
31.其中t、l、u代表系统的总动能、拉格朗日算子、总势能。拉格朗日方程表达式如下:
[0032][0033]
其中,qi为广义坐标,对应位移角度,则为位移的导数,对应转速,τi为与广义坐标qi相关的广义力。如图1所示,对每个旋转设备建立单独坐标系。上式建立起了作用在泵上广义力与转轴位置、速度和加速度之间的关系,根据该式并通过确定泵的动能和势能就可以推导电机与泵的动力学模型。
[0034]
动能计算:旋转设备i动能为:
[0035][0036]
其中,vi表示旋转体i的速度,ρ为体积微元dv的密度,v
li
为旋转设备i连杆的体积。
[0037]
势能计算:主要包括系统重力势能:
[0038]
系统中各个部件势能总和。
[0039]
最后将动能表达式与势能表达式带入到拉格朗日算子可得:
[0040][0041]
上式中,h为惯性矩阵,c为离心力和科氏力矩阵,g为重力项,τ为驱动力矩,为静态和动摩擦矩阵,τd为误差以及外界干扰所引起的不确定项。为最终的电机与泵动力学方程。
[0042]
在实际操作中使用matlab构建电机与泵的动力学模型并进行速度控制及施加泵类故障,仿真如图3所示,通过在simulink中,对电机所需要的各个模块进行配置组合,引入官方电力系统图形化用户接口模块、速度-扭矩控制曲线、控制增益量计算模块,仿照电机在实际过程中驱动泵需求,对电机转速进行控制,得到了稳定的驱动电机模型。通过模拟不同故障产生的不同力矩,施加到电机负载。通过此模型读取电机在故障发生时的电流转速等数据变化,并观察扭矩变化进行验证,得到后续算法所需数据。
[0043]
步骤s2:基于上述动力学模型构建广义动量观测器;
[0044]
具体地:故障信息作用于传动轴上会对电机与泵之间多处轴力矩产生影响,而由动力学模型表达式可知,作用于不同轴处的力矩是非常复杂的,其中既包括惯性力,科氏力、摩擦等阻力以及外部作用力等。而这些力相互之间是高耦合,非线性的,而在这些力的混合中,如何把需要的部分分离出来进行单独观察,也就是构建广义动量观测器的原因。
[0045]
定义旋转设备的期望广义动量p如下:
[0046][0047]
对上式关于时间进行求导,并结合矩阵具有反对称性,可以得到:
[0048][0049]
上式中τ
tot
为电机总力矩,由于向量中每一项只与该受力轴的力矩有关即力矩τ
tot,i
——作用在该轴上的力矩。因此广义动量观测器对于力矩有很好的解耦性可以方便我们对力矩进行研究。引入故障外力矩项,将动力学方程与广义动量观测器对应建立广义动量观测器,此过程可由基于广义动量观测系统结构图图4表示。首先,设定外力矩的观测量对应动力学方程中的故障外力矩:
[0050][0050]
为观测(实际)广义动量,即实际检测动量;
[0051]
求导可得:
[0052]
k0为增益矩阵;
[0053]
而
[0054]
其中τ
tot
,,都是对象的动力学模型关于时间t的函数。
[0055]
对上式关于时间t积分可得:
[0056][0057]
近似将可以得到:
[0058][0059]
进行拉普拉斯变换,可以得到:
[0060][0061]
因此,可以完全表征额外的故障力矩τ
ext
,也就可以通过动量差实现对于故障力矩的监测,而动量仅需得到系统动力学建模中得到的惯性矩阵与速度信息,而且通过电机电流信息也可以得到输出力矩的变化情况,实现对广义动量观测法的验证。
[0062]
步骤s3:推导增益矩阵k0对于观测器输出与故障外力矩对应关系的影响;
[0063]
具体地:此算法相当于一阶系统,高频噪声则无法通过,而且当t较小即k0较大时,有较快的响应速度,观测值会在很短时间内逼近τ
ext
。目前暂无有效手段获取实验中各种高频噪声的频率分布,故采用不同的k0进行多组实验,从延时和误差两方面综合考虑,选取合
适的增益矩阵k0。
[0064]
步骤s4:设定阈值,得到检测结果。
[0065]
具体地:不同的故障情况会产生不同的故障力矩,设置不同的触发阈值,可以实现对于不同故障的识别,如图5所示,观测值基本可以跟踪故障力矩,也就是说观测值可以较好的表征故障力矩τ
ext
。
[0066]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1