一种仿生泵
:本技术属于人工肌肉领域,涉及一种仿生泵,具体涉及一种利用人工肌肉驱动的仿生泵。
背景技术
0、
背景技术:
1、人工肌肉是一种新型的绿色科技产物,具有良好的生物形特性,一般采用节能低耗的压缩空气作为传动介质,通入压缩空气后,人工肌肉的外形尺寸可以根据需要进行变化,因此被广泛应用于机械、医疗等技术领域。
2、传统液压柱塞泵在工程机械中应用广泛,其采用液压油作为传动介质,虽然传统液压柱塞泵的结构简单,但是普遍存在泄露现象,对环境有一定的污染,而且使用成本也很高。而采用压缩空气作为动力源的驱动器,相比之下更加节能低耗,但是现在的气动柱塞泵的结构还存如下问题:
3、问题1:传统气缸由缸体,活塞杆,密封元器件等元件组成,采用压缩空气作为介质,虽然结构简单,但是对整个装置的密封要求高,气缸输出力的大小与缸径的平方成正比,在密封环境下,气缸才能在高温或是低温环境中保持良好的工作性能并且防尘、防水,具有很好的适应性。但是气缸的工作压力一般在0.4到0.6mp之间,因此气缸输出相比之下就比较小,并且气缸的传动效率较低,而且因为空气具有可压缩性,保证气缸的密封性很困难。
4、问题2:传统的机械齿轮传动制造和安装精度要求较高,价格昂贵,精度较低,振动和噪声较大,不宜用于轴间距离大的传动。
5、问题3:径向柱塞泵的容积效率高,运行噪声小,运动平稳均匀,工作压力高,但是与轴向柱塞泵比较的话,径向柱塞泵的体积是略大的,工作原理也相对复杂,而且使用寿命也没有轴向柱塞泵长。
技术实现思路
0、
技术实现要素:
1、为解决现有技术中存在的问题,本实用新型提出一种仿生泵。
2、本实用新型的技术方案如下:
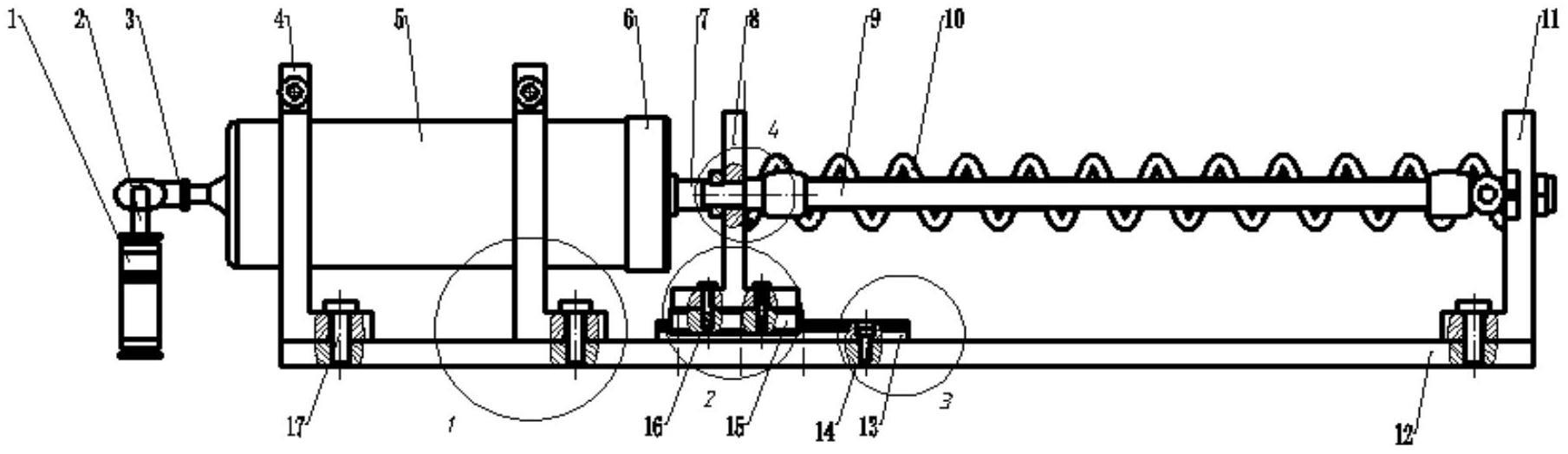
3、一种仿生泵,包括底板、固定连接在底板一端的固定支撑板、与固定支撑板平行且滑动连接在底板上的滑动支撑板、设于滑动支撑板与固定支撑板之间的人工肌肉元件和弹簧、活塞杆与滑动支撑板连接且泵出端与阀连通的柱塞泵。
4、进一步地,所述活塞包括相互紧贴并依次设置在活塞杆上的第一钢片、橡胶片和第二钢片;第一钢片固定连接在活塞杆的顶端;橡胶片和第二钢片可活动地套接在所述活塞杆上。
5、进一步地,所述仿生泵还包括活塞密封调节机构,所述活塞密封调节机构包括与可转动连接在滑动支撑板上的内螺纹销、设置在活塞杆端部与所述内螺纹销的内螺纹相适配的外螺纹、一端紧抵第二钢片、另一端伸出柱塞泵的缸筒外并可滑动设置在塞杆上的套筒,使所述套筒在活塞杆定位的螺钉。
6、进一步地,所述仿生泵还包括弹簧定位销,该弹簧定位销设置固定支撑板上且与内螺纹销同轴线的位置上;所述内螺纹销设有圆柱形本体,该圆柱形本体一端设有轴肩;滑动支撑板上设有孔,内螺纹销穿过孔并通过轴肩和开口销轴向定位且可转动的设置在滑动支撑板上。
7、进一步地,所述弹簧两端分别固定连接在滑动支撑板和固定支撑板上,且弹簧两端分别套接所述内螺纹销和弹簧定位销上。
8、进一步地,所述人工肌肉元件设有两组,该两组人工肌肉元件对称分布于所述弹簧两侧。
9、进一步地,所述人工肌肉两端设有外螺纹,所述固定支撑板与滑动支撑板上分别设有与人工肌肉的外螺纹相适配的螺纹孔,所述人工肌肉两端与所述固定支撑板与滑动支撑板螺纹连接。
10、进一步地,还包括快接直通插头和气管,所述人工肌肉元件均采用气动人工肌肉,所述气动人工肌肉与滑动支撑板的连接端连接快接直通插头一端,所述快接直通插头的另一端经气管与压缩气体源相连。
11、进一步地,所述底板上端面沿柱塞泵轴线方向设有两组直线导轨副,所述滑动支撑板通过固定在该两组直线导轨副的滑块上与底板滑动连接。
12、本实用新型相比于现有技术具有如下有益效果:
13、本实用新型的仿生泵将人工肌肉元件作为柱塞泵的驱动源,利用人工肌肉元件的变形原理驱动柱塞泵工作,避免现有气缸作为驱动源的气密性差、噪音高的缺陷,同时本实用新型的成本较低并且适应性好,可以根据实际需求对人工肌肉元件的长度进行定制。
14、本实用新型的仿生泵,为了使得活塞密封性更好,将活塞设计为包括第一钢片、橡胶片和第二钢片的结构,并配设有活塞密封调节机构,通过活塞密封调节机构的调节可以使得橡胶片径向膨胀,进而调节活塞的密封性。
15、本实用新型的人工肌肉元件可设计为气动人工肌肉,在气动人工肌肉通入高压气体后,能够产生相当于同样缸径气缸数十倍的拉伸力,并且本实用新型的气动人工肌肉采用清洁的压缩空气作为工作介质,气动势能向机械势能的转换效率能够达到32%~49%,无泄漏现象,对环境更加友好,同时还具有结构简单、轻便、对进度要求不高、安装方便、抗尘、抗污染能力强的优点。
16、本实用新型的仿生泵采用液压传动,相比于现有的机械传动具有传动平稳、传动比比较高和运动误差小的优点,并且液压传动还可以更好的与计算机技术相结合,实现系统的自动控制。
技术特征:
1.一种仿生泵,其特征在于:包括底板、固定连接在底板一端的固定支撑板、与固定支撑板平行且滑动连接在底板上的滑动支撑板、设于滑动支撑板与固定支撑板之间的人工肌肉元件和弹簧、活塞杆与滑动支撑板连接且泵出端与阀连通的柱塞泵。
2.根据权利要求1所述的仿生泵,其特征在于:所述活塞包括相互紧贴并依次设置在活塞杆上的第一钢片、橡胶片和第二钢片;第一钢片固定连接在活塞杆的顶端;橡胶片和第二钢片可活动地套接在所述活塞杆上。
3.根据权利要求2所述的仿生泵,其特征在于:所述仿生泵还包括活塞密封调节机构,所述活塞密封调节机构包括与可转动连接在滑动支撑板上的内螺纹销、设置在活塞杆端部与所述内螺纹销的内螺纹相适配的外螺纹、一端紧抵第二钢片、另一端伸出柱塞泵的缸筒外并可滑动设置在塞杆上的套筒,使所述套筒在活塞杆定位的螺钉。
4.根据权利要求3所述的仿生泵,其特征在于:所述仿生泵还包括弹簧定位销,该弹簧定位销设置固定支撑板上且与内螺纹销同轴线的位置上;所述内螺纹销设有圆柱形本体,该圆柱形本体一端设有轴肩;滑动支撑板上设有孔,内螺纹销穿过孔并通过轴肩和开口销轴向定位且可转动的设置在滑动支撑板上。
5.根据权利要求4所述的仿生泵,其特征在于:所述弹簧两端分别固定连接在滑动支撑板和固定支撑板上,且弹簧两端分别套接所述内螺纹销和弹簧定位销上。
6.根据权利要求1~5任一所述的仿生泵,其特征在于:所述人工肌肉元件设有两组,该两组人工肌肉元件对称分布于所述弹簧两侧。
7.根据权利要求1所述的仿生泵,其特征在于:所述人工肌肉两端设有外螺纹,所述固定支撑板与滑动支撑板上分别设有与人工肌肉的外螺纹相适配的螺纹孔,所述人工肌肉两端与所述固定支撑板与滑动支撑板螺纹连接。
8.根据权利要求1所述的仿生泵,其特征在于:还包括快接直通插头和气管,所述人工肌肉元件均采用气动人工肌肉,所述气动人工肌肉与滑动支撑板的连接端连接快接直通插头一端,所述快接直通插头的另一端经气管与压缩气体源相连。
9.根据权利要求1所述的仿生泵,其特征在于:所述底板上端面沿柱塞泵轴线方向设有两组直线导轨副,所述滑动支撑板通过固定在该两组直线导轨副的滑块上与底板滑动连接。
技术总结
本技术公开一种仿生泵,包括底板、固定连接在底板一端的固定支撑板、与固定支撑板平行且滑动连接在底板上的滑动支撑板、设于滑动支撑板与固定支撑板之间的人工肌肉元件和弹簧、活塞杆与滑动支撑板连接且泵出端与阀连通的柱塞泵。该仿生泵将人工肌肉元件作为柱塞泵的驱动源,利用人工肌肉元件的变形原理驱动柱塞泵工作,避免现有气缸作为驱动源的摩擦运动现象,具有良好的气密性及其实用性,同时本技术的仿生泵对环境更加友好,同时还具有结构简单、轻便、对进度要求不高、安装方便、抗尘、抗污染能力强的优点。
技术研发人员:闫华,游星凌,何晨东,魏天琪,曹丽丽,付磊
受保护的技术使用者:南京工程学院
技术研发日:20220809
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!