抱夹动作选择阀、抱夹液压系统和作业机械的制作方法
1.本实用新型涉及一种抱夹,更具体地说,涉及一种抱夹动作选择阀、液压系统和作业机械。
背景技术:
2.抱夹用于夹抱搬运箱型货物、或者堆码成垛的物品例如农场的草垛、砖厂生产出来的建筑用方砖等。
3.抱夹包括夹板座和滑动安装于夹板座前侧的两平动夹板,每个平动夹板与夹板座之间均连接有油缸,推动平动夹板在夹板座上移动。在现有的抱夹液压系统中,推动平动夹板移动的两液压油缸通常是大腔与大腔相互连通,小腔与小腔相互移动,对平动夹板进行操作时,两平动夹板通常是同时相向移动或背向移动。
4.现有的抱夹液压系统中,抱夹只能实现夹紧和松开两种动作,驾驶安装抱夹的作业机械将货物运输到卸料点卸料时,只能打开抱夹将货物卸掉,即作业机械停止以后,无法调节平动抱夹的位置,导致卸料时无法调节卸料位置,导致卸料位置不准确的问题。
技术实现要素:
5.本实用新型要解决的技术问题是现有抱夹在作业机械停止移动以后无法调节平动抱夹位置的问题,而提供一种抱夹动作选择阀、液压系统和作业机械,使得抱夹的两平动夹板能够通向移动调节位置,从而调节抱夹夹取或卸货的位置。
6.本实用新型为实现其目的的技术方案是这样的:构造一种抱夹动作选择阀,其特征在于其具有p口、t口、a口、b口、c口、d口并包含两位切换阀、第一液控单向阀、第二液控单向阀和第三液控单向阀;
7.两位切换阀处于第一工作位时其a口与c口导通、b口与d口导通,e口、f口、g口和h口四油口间相互截止;
8.两位切换阀处于第二工作位时其e口与g口导通、f口与h口导通,a口、b口、c口和d口四油口间相互截止;
9.p口同时与a口和e口连通,t口同时与b口和f口连通;c口与d口连通,d口与a口连通;
10.第一液控单向阀和第二液控单向阀的正向导通进油端均与g口连通,第一液控单向阀和第二液控单向阀的反向导通液控端均与h口连通;第一液控单向阀的正向导通出油端与d口连通,第二液控单向阀的正向导通出油端与a口连通;
11.第三液控单向阀的正向导通进油端与h口连通,第三液控单向阀的正向导通出油端与b口和c口相互连通,第三液控单向阀的反向导通液控端与g口连通。
12.本实用新型抱夹动作选择阀中,所述两位切换阀是断电时工作于第二工作位的两位八通电磁阀;或者所述两位切换阀包含两个均为两位四通的第一切换阀和第二切换阀;a口、b口、c口与d口为第一切换阀的四个油口,e口、f口、g口与h口为第二切换阀的四个油口。
所述第一切换阀和第二切换阀均是断电时工作于第二工作位的电磁阀。
13.本实用新型为实现其目的的技术方案是这样的:构造一种抱夹液压系统,其包括液压油箱、吸油口与液压油箱连接的液压泵、进油口与液压泵泵口连接且回油口与液压油箱连接的抱夹动作操控阀、用于驱动平动夹板的第一油缸和第二油缸,其特征在于还包括前述的抱夹动作选择阀,所述抱夹动作选择阀的p口和t口对应与抱夹动作操控阀的两工作油口连接,第一油缸的大腔和小腔各自通过管路对应与a口和b口连通,第二油缸的大腔和小腔各自通过管路对应与d口和c口连通。
14.本实用新型为实现其目的的技术方案是这样的:构造一种作业机械,包括主机和安装于主机上的抱夹,所述抱夹包括滑动设置于夹板座上的左平动夹板和右平动夹板,其特征在于还包括前述的抱夹液压系统,所述左平动夹板和右平动夹板对应与第一油缸和第二油缸连接。
15.本实用新型作业机械中,所述主机为装载机主机,所述抱夹安装于所述动臂前端。或者所述主机为平衡重叉车主机,所述抱夹安装于所述货叉架上。
16.本实用新型与现有技术相比,抱夹在抱夹动作操控阀和抱夹动作选择阀的配合下,可使得抱夹的左平动夹板和右平动夹板同向同步移动,从而实现通过调节平动夹板位置而调节卸料位置的目的,提高作业效率。
附图说明
17.图1是本实用新型抱夹的结构示意图。
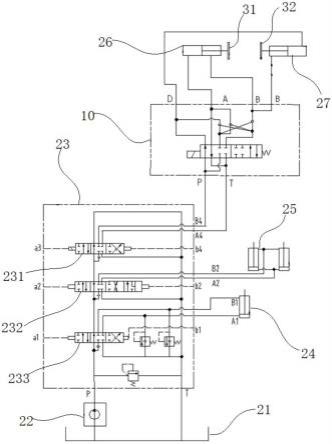
18.图2是本实用新型抱夹液压系统的原理图。
19.图3是本实用新型抱夹动作选择阀的原理图。
20.图4是本实用新型抱夹动作选择阀的第二实施方式原理图。
21.图中零部件名称及序号:
22.抱夹动作选择阀10、第一切换阀11、第二切换阀12、第一液控单向阀13、第二液控单向阀14、第三液控单向阀15、两位切换阀16、液压油箱21、液压泵22、分配阀23、属具联换向阀231、动臂联换向阀232、转斗联换向阀233、转斗油缸24、动臂油缸25、第一油缸26、第二油缸27、夹板座30、左平动夹板31、右平动夹板32。
具体实施方式
23.下面结合附图说明具体实施方案。
24.如图1所示,本实用新型实施例中的抱叉包括夹板座30,其上安装有左平动夹板31和右平动夹板32。两平动夹板位于夹板座30的前侧,平动夹板的后端与夹板座30连接,能够在夹板座30上的滑动机构上滑动。在夹板座30中设置第一油缸26和第二油缸27,第一油缸26和第二油缸27对应与左平动夹板31和右平动夹板32连接,用于推动左平动夹板31和右平动夹板32在夹板座上移动。
25.上述抱夹为一种属具,其可以安装在主机上,以构成具有对货物进行夹抱作业的作业机械。主机可以是装载机主机、平衡重叉车主机或其他能够安装抱夹并能够升降抱夹的机械设备。
26.装载机的动臂前端通常安装的属具为铲斗,以便能够对砂石土方、煤炭、粮食等颗
粒松散物料进行铲装。装载机主机是拆除掉铲斗后剩余的部分,在装载机主机的动臂和转斗连杆上连接安装抱夹可形成具有对货物进行夹抱搬运作业的作业机械,例如用于农场夹抱草垛。
27.平衡重叉车利用其安装在货叉架上的货叉托举搬运货物,平衡重叉车主机是平衡重叉车拆除掉货叉后剩余的部分,在平衡重叉车主机的货叉架上可安装抱夹,使其形成具有夹抱搬运功能的作业机械,例如用于在仓库中搬运箱型货物。
28.图2给出了本实用新型实施例中驱动抱夹的平动夹板移动的液压系统原理图。如图2所示,抱夹液压系统其包括液压油箱21、液压泵22、抱夹动作操控阀、第一油缸26、第二油缸27和抱夹动作选择阀10。
29.液压泵22的吸油口与液压油箱21连接。抱夹动作操控阀为主机上分配阀23中的一联换向阀,例如在装载机主机上,其分配阀23包括动臂联换向阀232、转斗联换向阀233和属具联换向阀231。动臂联换向阀232的工作油口与动臂油缸25连接,转斗联换向阀233与转斗油缸24连接。分配阀23中各联换向阀的进油口与液压泵22的泵口连接,回油口与液压油箱21连接。在本实施例作业机械中,属具联换向阀231构成抱夹动作操控阀,其两工作油口与抱夹动作选择阀10连接,控制端与先导阀连接,先导阀由先导手柄操控,通过操控先导手柄进行抱夹动作的操作。属具联换向阀231工作于左位时,分配阀23的b3口流出工作压力油,a3口流入回油;属具联换向阀231工作于右位时,分配阀23的a3口流出工作压力油,b3口流入回油。
30.图3给出了本实用新型实施例中抱夹动作选择阀的原理图。
31.如图3所示,抱夹动作选择阀10具有p口、t口、a口、b口、c口、d口并包含两位切换阀16、第一液控单向阀13、第二液控单向阀14和第三液控单向阀15。
32.两位切换阀16为两位八通电磁阀,其电磁铁线圈断电时,工作于第二工作位。
33.两位切换阀16的电磁线圈得电而处于第一工作位时,a口与c口导通、b口与d口导通,e口、f口、g口和h口四油口间相互截止。
34.两位切换阀16的电磁线圈断电而处于第二工作位时其e口与g口导通、f口与h口导通,a口、b口、c口和d口四油口间相互截止。
35.p口同时与a口和e口连通,t口同时与b口和f口连通;c口与d口连通,d口与a口连通。
36.第一液控单向阀13的正向导通进油端与两位切换阀16的g口连通,第一液控单向阀13的正向导通出油端与d口连通,第一液控单向阀13的反向导通液控端与h口连通。当h口的压力大于第一液控单向阀13的设定压力时,第一液控单向阀13正向和反向均导通;当h口的压力小于第一液控单向阀13的设定压力时,第一液控单向阀13仅能正向导通,也即由两位切换阀的g口向d口导通,反向则处于截止状态。
37.第二液控单向阀14的正向导通进油端与g口连通,第二液控单向阀14的正向导通出油端与a口连通,第二液控单向阀14的反向导通液控端与h口连通。当h口的压力大于第二液控单向阀14的设定压力时,第二液控单向阀14正向和反向均导通;当h口的压力小于第二液控单向阀的设定压力时,第二液控单向阀14仅能正向导通,也即由两位切换阀的g口向a口方向导通,反向则处于截止状态。
38.第三液控单向阀15的正向导通进油端与h口连通,第三液控单向阀15的正向导通
出油端与b口和c口相互连通,第三液控单向阀15的反向导通液控端与g口连通。当g口的压力大于第三液控单向阀15的设定压力时,第三液控单向阀15正向和反向均导通;当g口的压力小于第三液控单向阀15的设定压力时,第三液控单向阀15仅能正向导通,也即由两位切换阀的h口向b口和c口方向导通,反向则处于截止状态。
39.在本实用新型抱夹液压系统的实施例中,如图2所示,抱夹动作选择阀10的p口和t口对应与抱夹动作操控阀(也即属具联换向阀231)的两工作油口连接,第一油缸26的大腔通过管路与a口连通,第一油缸26的小腔通过管路与b口连通。第二油缸27的大腔通过管路与d口连通,第二油缸27的小腔通过管路与c口连通。
40.抱夹液压系统控制第一油缸26和第二油缸27伸缩而控制左平动夹板31和右平动夹板32的原理如下:
41.当两位切换阀16的电磁线圈得电工作于第一工作位,司机操作先导手柄前推时,分配阀23中的a3先导油口进油,控制属具联换向阀231处于左位工作,分配阀23的p口来油进入到抱夹动作选择阀10的p口,并经两位切换阀16的a口和c口从抱夹动作选择阀10的d口流出,进入到抱夹的第二油缸27的大腔,第二油缸27的活塞杆伸出。第二油缸27的小腔液压油流出进入抱夹动作选择阀10的c口,由于第三液控单向阀反向截止,c口油液经b口进入抱夹的第一油缸26的小腔,第一油缸26的大腔的液压油流经抱夹动作选择阀10的a口、两位切换阀16的d口和b口和抱夹动作选择阀10的t口和抱夹动作操控阀流回液压油箱,第一油缸26的活塞杆缩回。此时抱夹中的第二油缸27的活塞杆伸出、第一油缸26的活塞杆回缩,左平动夹板31和右平动夹板32同步向左侧移动,实现向左调节平动夹板的位置,从而使得在作业车辆停止移动时抱夹向左移动而选择卸料位置。
42.当两位切换阀16的电磁线圈得电工作于第一工作位,司机操作先导手柄后拉时,分配阀23中的b3先导油口进油,控制属具联换向阀231处于右位工作,分配阀23的p口来油进入到抱夹动作选择阀10的t口,并经两位切换阀16的b口和d口从抱夹动作选择阀10的a口流出后进入到抱夹的第一油缸26的大腔,第一油缸26的活塞杆伸出。第一油缸26的小腔液压油流出进入抱夹动作选择阀10的b口,并从c口进入抱夹第二油缸27的小腔,抱夹的第二油缸27的活塞杆缩回,第二油缸27的大腔的液压油流经抱夹动作选择阀10的d口、两位切换阀16的c口和a口、抱夹动作选择阀10的p口、抱夹动作操控阀流回液压油箱。此时抱夹的实现左平动夹板31和右平动夹板32同同步向右侧移动动作。
43.当两位切换阀16的电磁线圈断电工作于第二工作位,司机操作先导手柄前推时,分配阀23中的a3先导油口进油,控制属具联换向阀处于左位工作,分配阀23的p口来油进入到抱夹动作选择阀10的p口,并经两位切换阀16导通的e口和g口后分成两路,其中一路经第一液控单向阀13、抱夹动作选择阀10的d口流出进入到第二油缸27的大腔,另一路经第二液控单向阀14、抱夹动作选择阀10的a口流出进入到第一油缸26的大腔。第三液控单向阀15在g口压力油的控制下反向导通,第一油缸26的小腔和第二油缸27的小腔的油液经反向导通的第三液控单向阀15、两位切换阀16的h口、f口和抱夹动作选择阀10的t口、抱夹动作操控阀流回液压油箱。第一油缸26和第二油缸27的活塞杆均伸出,推动抱夹的左平动夹板31和右平动夹板32相向移动,实现抱夹夹紧货物。
44.当两位切换阀16的电磁线圈断电工作于第二工作位,司机操作先导手柄后拉时,分配阀23中的b3先导油口进油,控制属具联换向阀处于右位工作,分配阀23的p口来油进入
到抱夹动作选择阀10的t口,并经两位切换阀10的f口和h口从抱夹动作选择阀的b口和c口出来后进入到抱夹的第一油缸26小腔和第二油缸27小腔。第一液控单向阀13和第二液控单向阀14在h口压力的控制下反向导通,经抱夹动作选择阀10的d口、反向导通的第一液控单向阀13流出的第二油缸27的大腔油液与经抱夹动作选择阀10的a口、反向导通的第二液控单向阀14流出的第一油缸26大腔油液合流后再经两位切换阀16的g口和e口、抱夹动作选择阀10的p口、抱夹动作操控阀流回液压油箱。第一油缸26和第二油缸27的活塞杆均回缩,拉动抱夹的左平动夹板31和右平动夹板32背向移动,实现抱夹松开货物实现抱叉卸货。
45.在实用新型实施例中的抱夹中,通过操作抱夹动作操控阀和控制抱夹动作选择阀10,可实现抱夹的左平动夹板31和右平动夹板32实现相向移动(夹紧货物)、背向移动(松开货物)、同步同向移动(调节抱夹位置)。通过同步移动抱夹,实现抱夹位置调节,从而提高作业机械夹抱运输作业的工作效率。
46.在本实用新型的一些实施例中,抱夹动作选择阀10中的两位切换阀16还可以由两个两位四通电磁阀替代。如图4所示,两个两位四通电磁阀分别是第一切换阀11和第二切换阀12。a口、b口、c口、d口等四个油口为第一切换阀11的油口。第一切换阀11得电工作于第一工作位时a口与c口导通、b口与d口导通;第一切换阀11断电工作于第二工作位时,a口、b口、c口、d口等四个油口相互截止。
47.e口、f口、g口、h口等四个油口为第二切换阀12的油口,第二切换阀12得电工作于第一工作位时e口、f口、g口、h口等四个油口相互截止;第二切换阀12断电工作于第二工作位时e口与g口导通、f口与h口导通。
48.使用两个两位四通电磁阀替代两位八通的两位切换阀,抱夹液压系统控制抱夹的动作逻辑相同。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1