一种水下沉桩定位架的液压控制系统的制作方法
1.本实用新型涉及一种水下沉桩定位架的液压控制系统。
背景技术:
2.目前,海上风电正朝着深远海域方向发展,针对离岸25km以上、水深在25m~50m的深远海域的海上风电风机基础结构在设计上国内陆续尝试采用导管架基础结构形式(先桩法),该基础结构由四根φ2.4m~φ4.0m钢管桩(桩长在70m~110m之间)和一个内插入式导管架结构组成,钢管桩设计桩顶标高位于海床面以上7m~17m之间,需要进行水下沉桩施工,在深远海域进行水下沉桩作业,受大风、大浪、长涌等影响,施工窗口期很短,施工难度大,同时,内插入式导管架基础结构需要在水下与钢管桩进行连接,对基础钢管桩沉桩时的平面位置、标高、垂直度以及各个桩的相对位置控制精度要求高。因此基础钢管桩在沉桩时需要借助水下沉桩定位架,该水下沉桩定位架上安装四个上层抱桩器和四个下层抱桩器,每个上层抱桩器和每个下层抱桩器的驱动机构都是由液压油缸。另外该水下沉桩定位架上还安装了一套调平装置,以保证水下沉桩定位架的垂直度。调平装置也是由液压油缸作为驱动机构,为此需要通过液压控制系统对四个上层抱桩器、四个下层抱桩器和调平装置的液压驱动机构进行控制。
技术实现要素:
3.本实用新型的目的在于克服现有技术的缺陷而提供一种水下沉桩定位架的液压控制系统,它能确保水下沉桩定位架精确有效地进行打桩作业。
4.本实用新型的目的是这样实现的:一种水下沉桩定位架的液压控制系统,所述水下沉桩定位架为立式框架,该水下沉桩定位架为由钢管制成的四边形空间桁架结构并包括四根立柱和四片连接在四根立柱之间的立柱边板;所述水下沉桩定位架上设置一套调平装置,该套调平装置包括一块防沉板和四个一一对应地连接在水下沉桩定位架的四根立柱的下部与防沉板的顶面之间的调平升降机构;每个调平升降机构均由一个调平油缸驱动;所述水下沉桩定位架上设有四个上层抱桩器和四个下层抱桩器;每个上层抱桩器由一个上层抱桩油缸驱动,每个下层抱桩器由一个下层抱桩油缸驱动;其中,
5.所述液压控制系统包括液压控制阀组、油箱和液压泵;
6.所述液压控制阀组包括调平液压控制阀组、上层抱桩液压控制阀组和下层抱桩液压控制阀组;
7.所述调平液压控制阀组包括与第一主进油口、第一主回油口和四个并联连接在所述第一主进油口与所述第一主回油口之间的调平顶升回路,该四个调平顶升回路一一对应地为四个调平油缸提供液压油;每个调平顶升回路上均设有调平伺服比例阀、第一电磁阀、第一平衡阀、第二平衡阀和调平溢流阀;
8.所述调平伺服比例阀的进油口与所述第一主进油口连接,该调平伺服比例阀的回油口与第一主回油口连接;所述调平伺服比例阀的右路工作油口依次与所述第一平衡阀和
所述调平油缸的有杆腔油口连接,所述调平伺服比例阀的左路工作油口依次与所述第一电磁阀、所述第二平衡阀和所述调平油缸的无杆腔油口连接;所述调平油缸的无杆腔油口与有杆腔油口之间连接所述调平溢流阀;
9.所述上层抱桩液压控制阀组包括第二主进油口、第二主回油口和四个并联连接在所述第二主进油口与所述第二主回油口之间的上层抱桩回路,该四个上层抱桩回路一一对应地为四个上层抱桩油缸提供液压油;
10.每个上层抱桩回路包括抱桩伺服比例阀、抱桩平衡阀、液控单向阀和抱桩溢流阀;所述抱桩伺服比例阀的进油口与所述第二主进油口连接,该抱桩伺服比例阀的回油口与第二主回油口连接;所述抱桩伺服比例阀的左路工作油口依次所述抱桩平衡阀和所述上层抱桩油缸的无杆腔油口连接;所述抱桩伺服比例阀的右路工作油口依次与所述液控单向阀和所述上层抱桩油缸的有杆腔油口连接;所述上层抱桩油缸的无杆腔油口与所述抱桩伺服比例阀的右路工作油口之间连接所述抱桩溢流阀;
11.所述下层抱桩液压控制阀组包括第三主进油口、第三主回油口和四个并联连接在所述第三主进油口与所述第三主回油口之间的下层抱桩回路,该四个下层抱桩回路一一对应地为四个下层抱桩油缸提供液压油;所述下层抱桩回路的结构与所述上层抱桩回路的结构相同;
12.所述调平液压控制阀组的第一主回油口、所述上层抱桩液压控制阀组的第二主回油口以及下层抱桩液压控制阀组的第三主回油口均与所述油箱连接;
13.所述液压泵的进口与所述油箱连接,该液压泵的出口分别与调平液压控制阀组的第一主进油口、所述上层抱桩液压控制阀组的第二主进油口以及下层抱桩液压控制阀组的第三主进油口连接。
14.上述的水下沉桩定位架的液压控制系统,其中,所述液压泵的出口与所述第一主进油口之间、所述液压泵的出口与第二主进油口以及所述液压泵的出口与第三主进油口之间各自连接一个压力油过滤器。
15.上述的水下沉桩定位架的液压控制系统,其中,所述调平液压控制阀组还包括四个一一对应地连接在四个调平油缸的无杆腔之间的第二电磁阀。
16.本实用新型的水下沉桩定位架的液压控制系统具有以下特点:
17.1)能结合安装在水下沉桩定位架的位移传感器实现水下沉桩定位架的自动调平;
18.2)能在沉桩过程中结合安装在水下沉桩定位架上的垂直度传感器调节钢管桩的位置和垂直度。
附图说明
19.图1是本实用新型的涉及的水下沉桩定位架的结构示意图的平面图;
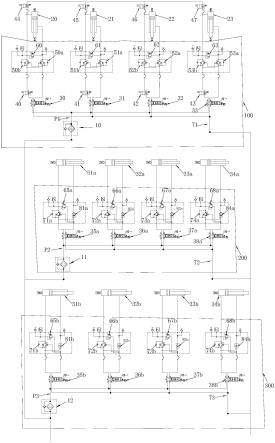
20.图2是的本实用新型的水下沉桩定位架的液压控制系统的原理图。
具体实施方式
21.下面将结合附图对本实用新型作进一步说明。
22.请参阅图1,本实用新型的水下沉桩定位架的液压控制系统,涉及的水下沉桩定位架1为立式框架,该水下沉桩定位架1为由钢管制成的四边形空间桁架结构并包括四根立柱
1a和四片连接在四根立柱1a之间的立柱边板;水下沉桩定位架1上设置一套调平装置,该套调平装置包括一块设在水下沉桩定位架1底部的防沉板(图中未示)和四个一一对应地连接在水下沉桩定位架1的四根立柱1a的下部与防沉板的顶面之间的调平升降机构;四个调平升降机构各自包括调平油缸20、21、22、223和导杆机构(图中未示);通过四个调平升降机构中的调平油缸20、21、22、23的活塞杆的伸缩,调节水下沉桩定位架1与防沉板之间的距离,进而能调节水下沉桩定位架1达到水平姿态;水下沉桩定位架1的四个角部的上部一一对应地设置四个上部抱桩器3a,水下沉桩定位架1的四个角部的下部一一对应地设置四个下部抱桩器3b;上层抱桩器3a的结构与下层抱桩器3b的结构相同,四个上层抱桩器3a各自包括上层抱桩油缸31a、32a、33a、34a、摆杆和防撞机构;四个下层抱桩器3b各自包括下层抱桩油缸31b、32b、33c、34c、摆杆和防撞机构
23.再请参阅图2,本实用新型的水下沉桩定位架的液压控制系统,包括液压控制阀组、油箱(图中未示)和液压泵(图中未示)。
24.液压控制阀组包括调平液压控制阀组100、上层抱桩液压控制阀组200和下层抱桩液压控制阀组300;其中,
25.调平液压控制阀组100包括与第一主进油口p1、第一主回油口t1和四个并联连接在第一主进油口p1与第一主回油口t1之间的调平顶升回路,每个调平顶升回路上均设有调平伺服比例阀30(31、32、33)、第一电磁阀40(41、42、43)、第一平衡阀50a(51a、52a、53a)、第二平衡阀50b(51b、52b、53b)和调平溢流阀60(61、62、63);
26.调平伺服比例阀30的进油口与第一主进油口p1连接,该调平伺服比例阀30(31、32、33)的回油口与第一主回油口t1连接;调平伺服比例阀30(31、32、33)的右路工作油口依次与第一平衡阀50a(51a、52a、53a)和调平油缸20的有杆腔连接,调平伺服比例阀30(31、32、33)的左路工作油口依次与第一电磁阀40(41、42、43)、第二平衡阀50b(51b、52b、53b)和调平油缸20(21、22、23)的无杆腔油口连接;调平油缸20(21、22、23)的无杆腔油口与有杆腔油口之间连接调平溢流阀60(61、62、63);
27.四个第一电磁阀40、41、42、43一一对应地控制四个调平顶升回路的导通和断开;当水下沉桩定位架1达到指定位置时,断开四个调平顶升回路,起到锁定水下沉桩定位架1位置的作用。四个第一平衡阀50a、51a、52a、53a用于水下沉桩定位架1起吊时锁定防沉板的作用。四个第二平衡阀50b、51b、52b、53b用于沉桩定位架1下降时一一对应地控制四个调平油缸20、21、22、23的速度不受负载的影响。
28.四个调平溢流阀60、61、62、63一一对应地限制四个调平油缸20、21、22、23的无杆腔内的油压,起到安全保护油缸的作用。
29.四个第二电磁阀44、45、46、47将四个调平油缸20、21、22、23的无杆腔串联,在调平工况下四个第二电磁阀44、45、46、47通电,起到平衡四个调平油缸20、21、22、23的无杆腔内压力作用,防止任何一个调平油缸憋压超载。
30.四个调平油缸20、21、22、23既可以单独动作,也可以协调同步动作。
31.上层抱桩液压控制阀组200包括第二主进油口p2、第二主回油口t2和四个并联连接在第二主进油口p2与第二主回油口t2之间的上层抱桩回路,该四个上层抱桩回路一一对应地为四个上层抱桩油缸31a、32a、33a、34a提供液压油;
32.每个上层抱桩回路包括抱桩伺服比例阀35a(36a、37a、38a)、抱桩平衡阀71a(72a、
73a、74a)、液控单向阀81a(82a、83a、84a)和抱桩溢流阀65a(66a、67a、68a);抱桩伺服比例阀35a(36a、37a、38a)的进油口与第二主进油口p2连接,该抱桩伺服比例阀35a(36a、37a、38a)的回油口与第二主回油口t2连接;抱桩伺服比例阀35a(36a、37a、38a)的左路工作油口依次与抱桩平衡阀71a(72a、73a、74a)和上层抱桩油缸31a(32a、33a、34a)的无杆腔油口连接;抱桩伺服比例阀35a(36a、37a、38a)的右路工作油口依次与液控单向阀81a(82a、83a、84a)和上层抱桩油缸31a(32a、33a、34a)的有杆腔连接;上层抱桩油缸31a(32a、33a、34a)的无杆腔油口与抱桩伺服比例阀35a(36a、37a、38a)的右路工作油口之间连接抱桩溢流阀65a(66a、67a、68a);
33.下层抱桩液压控制阀组300包括第三主进油口p3、第三主回油口t3和四个并联连接在第三主进油口p2与第三主回油口t3之间的下层抱桩回路,该四个下层抱桩回路一一对应地为四个下层抱桩油缸31b、32b、33b、34b提供液压油;下层抱桩回路的结构与上层抱桩回路的结构相同;
34.每个下层抱桩回路包括抱桩伺服比例阀35b(36b、37b、38b)、抱桩平衡阀71b(72b、73b、74b)、液控单向阀81b(82b、83b、84b)和抱桩溢流阀65b(66b、67b、68b);抱桩伺服比例阀35b(36b、37b、38b)的进油口与第三主进油口p3连接,该抱桩伺服比例阀35b(36b、37b、38b)的回油口与第三主回油口t3连接;抱桩伺服比例阀35b(36b、37b、38b)的左路工作油口依次与抱桩平衡阀71b(72b、73b、74b)和下层抱桩油缸31b(32b、33b、34b)的无杆腔油口连接;抱桩伺服比例阀35b(36b、37b、38b)的右路工作油口依次与液控单向阀81b(82b、83b、84b)和下层抱桩油缸31b(32b、33b、34b)的有杆腔连接;下层抱桩油缸31b(32b、33b、34b)的无杆腔油口与抱桩伺服比例阀35b(36b、37b、38b)的右路工作油口之间连接抱桩溢流阀65b(66b、67b、68b)。
35.调平液压控制阀组100的第一主回油口t1、上层抱桩液压控制阀组200的第二主回油口t2以及下层抱桩液压控制阀组300的第三主回油口t3均与油箱连接;
36.液压泵的进口与油箱连接,该液压泵的出口分别连接三个压力油过滤器10、11、12的进口,该三个压力油过滤器10、11、12的出口一一对应地与第一主进油口p1、第二主进油口p2以及第三主进油口p3连接。
37.本实用新型的水下沉桩定位架的液压控制系统,工作原理如下:
38.先进行水下沉桩定位架1的调平作业,当液压泵将油箱内的液压油泵入由第一主进油口p2进入调平液压控制阀组100,经过压力油过滤器10进入调平伺服比例阀30、31、32、33中,四个调平伺服比例阀30、31、32、33通过can总线输入信号一一对应地控制进入四个调平顶升回路的液压油流量大小以及进给液压油的方向。
39.当输入理想四个调平油缸20、21、22、23的伸出位置比位移传感器测得的当前四个调平油缸20、21、22、23的伸出位置高时,四个调平伺服比例阀30、31、32、33的阀芯切换到左位,液压油依次经四个第一电磁阀40、41、42、43和第二平衡阀50b、51b、52b、53b一一对应地进入四个调平油缸20、21、22、23的无杆腔,四个调平油缸20、21、22、23的有杆腔排出液压油,水下沉桩定位架1上升。四个调平油缸20、21、22、23的动作过程由四个调平伺服比例阀30、31、32、33一一对应地根据四个调平油缸20、21、22、23的位移反馈信号全程控制四个调平油缸20、21、22、23的同步精度。
40.当输入理想四个调平油缸20、21、22、23的伸出位置比位移传感器测得的当前四个
调平油缸20、21、22、23的伸出位置低时,四个调平伺服比例阀30、31、32、33阀芯切换到右位,液压油经第一平衡阀50a、51a、52a、53a一一对应地进入四个调平油缸20、21、22、23的有杆腔,四个调平油缸20、21、22、23的无杆腔排出液压油,水下沉桩定位架1下降,此时,四个第二平衡阀50b、51b、52b、53b起到防失速作用。四个调平油缸20、21、22、23的动作过程由四个调平伺服比例阀30、31、32、33一一对应地根据四个调平油缸20、21、22、23的位移反馈信号全程控制四个调平油缸20、21、22、23的同步精度。
41.当位移传感器测得四个调平油缸20、21、22、23达到指定伸出位置时,位移传感器的信号反馈给相应的调平伺服比例阀30、31、32、33,四个调平伺服比例阀30、31、32、33的阀芯切换到中间位,相应的四个第一电磁阀40、41、42、43断电不导通,四个调平油缸20、21、22、23的位置保持不变,此时,四个调平溢流阀60、61、62、63的设置是为了防止撞击或者负载突然变大导致四个调平油缸20、21、22、23的无杆腔内的压强过大,起到安全保护的作用。
42.水下沉桩定位架1的调平工作完成后,即可通过四个上部抱桩器3a和四个下部抱桩器3b开始钢管桩的夹持作业。
43.四个上部抱桩器3a夹桩时,液压油从第二主进油口p2经压力油过滤器11分别进入四个抱桩伺服比例阀35a、36a、37a、38a,四个抱桩伺服比例阀35a、36a、37a、38a通过can总线输入信号控制液压油进入四个上部抱桩回路的流量大小及进给方向。
44.当四个抱桩伺服比例阀35a、36a、37a、38a的阀机能符号处于左位时,液压油经四个液控单向阀81a、82a、83a、84a一一对应地进入四个上层抱桩油缸31a、32a、33a、34a的有杆腔,四个上层抱桩油缸31a、32a、33a、34a收缩;当四个抱桩伺服比例阀35a、36a、37a、38a阀机能符号处于右位时,液压油经四个抱桩平衡阀71a、72a、73a、74a一一对应地进入四个上层抱桩油缸31a、32a、33a、34a的无杆腔,四个上层抱桩油缸31a、32a、33a、34a伸出。四个抱桩伺服比例阀35a、36a、37a、38a可以根据工程桩的位置,输入位移信号进行钢管桩的夹持。
45.当四个抱桩伺服比例阀四个抱桩伺服比例阀35a、36a、37a、38a的阀机能符号处于中间位时,四个上层抱桩油缸31a、32a、33a、34a的伸出位置保持不变,达到顶紧钢管桩的作用,此时,四个抱桩溢流阀65a、66a、67a、68a的作用是一一对应地防止打桩过程中冲击导致四个上层抱桩油缸31a、32a、33a、34a的无杆腔内的压强大于设定值,起到安全保护上层抱桩油缸的作用。
46.四个下部抱桩器3b夹桩时,与四个上部抱桩器3a夹桩时的工作原理相同。
47.以上实施例仅供说明本实用新型之用,而非对本实用新型的限制,有关技术领域的技术人员,在不脱离本实用新型的精神和范围的情况下,还可以作出各种变换或变型,因此所有等同的技术方案也应该属于本实用新型的范畴,应由各权利要求所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1